基于投影条纹的转轴径向振动位移视觉测量装置和方法
1.本发明涉及机器视觉测量振动技术领域,具体涉及一种基于投影条纹的转轴径向振动位移视觉测量装置及方法。
背景技术:
2.旋转机械工作时不可避免地会产生振动,而此类非预期振动将会造成设备结构的破坏、零件磨损加剧等危害,甚至会大幅降低设备使用寿命和严重威胁人的生命安全,因此对于旋转机械的振动的状态检测和故障诊断具有非同寻常的意义。
3.机械结构中的动态参数中蕴含着丰富的动态特征信息,因此可以通过对设备中的动态信号的测量与处理,实现对于旋转机械的动态监测。
4.随着视觉技术及信号处理技术的发展,基于机器视觉的动态测量方法越来越受到学者的青睐。但是目前比较常见的视觉测量方法中,相机标定过程比较繁琐,同时存在算法较为复杂,采集数据量庞大,处理速度较慢的问题。
技术实现要素:
5.有鉴于此,本发明的目的在于提供一种基于投影条纹的转轴径向振动位移视觉测量装置及方法,大幅降低了硬件成本,提升了数据处理效率,实现了对振动信号高效率、高精度测量。
6.为实现上述目的,本发明采用如下技术方案:
7.一种基于投影条纹的转轴径向振动位移视觉测量装置,包括投影灯,二维相机和图像处理单元;所述投影灯将条纹投影至被测转轴表面,用以测量待测转轴的多维空间位移信息;所述二维相机对待测结构表面的投影条纹图像进行采集,并将采集到的条纹信号序列由数据线传输至图像处理单元;所述图像处理单元实时分析条纹信号序列,以获得转轴的径向二维振动信息。
8.进一步的,所述投影灯包括led光源和方波条纹薄片,所述led 光源照射在方波条纹薄片上投影出周期固定的方波条纹至被测结构表面,投影条纹图案大小和位置皆可调整。
9.进一步的,所述二维相机包括面阵传感器、集成电路板、成像镜头、设备接口和电源。成像范围可以根据投影条纹所在像素区域进行缩小,以提高相机的采样帧率。所述二维相机对投影条纹进行采集时其成像光轴与投影条纹平面垂直,将投影条纹置于二维相机图像的中心位置成像。
10.进一步的,所述投影灯设置于被测结构正前方左侧或右侧30-45 度进行投射,投射出的条纹强度变化方向与转轴轴线平行,图案为弯曲条纹,所获得的条纹信号中从左往右条纹密度线性上升;所述条纹信号将随着结构竖直方向的位移而变化,由于条纹信号关于被测结构中心线高度对称,利用此信号特点能够精准定位结构对称中心的位置,通过求解该结构中心的位置变化得到结构竖直方向的位移;
11.一种基于投影条纹的转轴径向振动位移视觉测量装置的测量方法,包括以下步骤:
12.步骤s1:利用投影灯将方波条纹投射至待测结构的测量位置,设置好二维相机的采集参数,调整好二维相机的位置并固定好,使投影条纹成像于二维传感器的中心位置;
13.步骤s2:通过二维传感器对振动过程的条纹图像信号进行连续采集;
14.步骤s3:将二维传感器中的条纹信号序列传输至图像处理单元,由图像处理模块对条纹信号序列进行实时分析,从待测结构的多维运动特征中提取结构多维振动信息。
15.进一步的,所述步骤s3具体为:
16.步骤s31:将第一帧条纹信号进行截取,选取出条纹强度信号强的区域进行处理;选取区域的条纹信号的其中一行条纹作为参考条纹信号,将参考条纹信号与图像中的其他信号进行运算,得到第一帧条纹信号的相关系数曲线;
17.步骤s32:利用能量重心法对相关系数曲线进行处理,定位相关系数曲线两个峰值的坐标位置,由于条纹信号关于被测结构中心线高度对称,通过相关系数曲线两个峰值的坐标的数学关系式,定位被测结构中心线所在的坐标位置;
18.步骤s33:重复步骤s31,对每帧条纹信号的条纹强度信号强的区域进行截取,对此区域进行处理,并对每一帧条纹信号进行计算,从而得到相关系数曲线;
19.步骤s34:重复步骤s32,利用能量重心法对相关系数曲线进行处理,定位相关系数曲线两个峰值的坐标位置,借助条纹信号关于被测结构中心线高度对称的成像特征,由相关系数曲线两个峰值的坐标的数学关系式定位每一帧条纹信号中被测结构中心线所在的坐标位置,获得被测结构竖直方向的振动位移信息;
20.步骤s35:将每一帧条纹信号的结构中心线所在行的条纹曲线提取出来,对其进行处理,提升条纹曲线信号强度,并将各帧条纹信号的结构中心线所在行的条纹曲线依次放入新图像矩阵,得到由结构中心线所在行的条纹曲线组成的新条纹信号;
21.步骤s36:通过将新条纹信号中的第一行条纹强度曲线,即第一帧条纹信号的结构中心线所在行的条纹曲线与新条纹信号进行互相关运算,得到第一帧条纹信号与各帧信号的结构中心线所在行条纹曲线互相关曲线序列,通过定位每一帧互相关曲线峰值坐标,获取被测结构沿成像光轴方向的位移信息。
22.进一步的,所述结构沿竖直方向的位移数学关系式为:
[0023][0024]
其中δy(i)为结构第i帧沿竖直方向的位移,py(i)为第i帧条纹信号中被测结构中心线的位置坐标,pr为参考帧条纹信号中被测结构中心线的位置坐标,n
l
为参考帧有效条纹信号的竖直方向中心距离内覆盖的像素点数,l为有效条纹信号的竖直方向覆盖的中心距离。
[0025]
进一步的,所述结构沿成像光轴方向的位移数学关系式为:
[0026][0027]
其中δx(i)为结构第i帧沿成像光轴方向的位移,p
x
(i)为第i帧条纹信号中被测结构中心线处的互相关曲线的峰值坐标,pr为参考帧条纹信号中被测结构中心线处的互相
关曲线的峰值坐标,n
l
为参考帧有效条纹信号水平方向中心距离内覆盖的像素点数,l为有效条纹信号的水平方向覆盖的中心距离。
[0028]
本发明与现有技术相比具有以下有益效果:
[0029]
本发明实现结构多维振动的测量,有效降低了硬件成本,提升了数据处理效率,实现了对振动信号高效率、高精度测量。
附图说明
[0030]
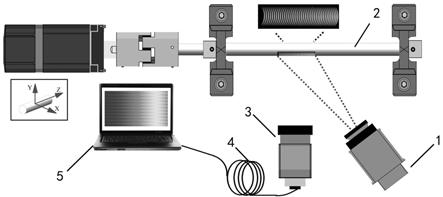
图1是本发明实施例的装置结构示意图;
[0031]
图2是本发明实施例计算结构沿竖直方向位移的图像处理流程图;其中(a)为二维相机记录的第一帧条纹信号;(b)为从(a)中截取出的强信号区域;(c)为利用(b)中虚线行条纹强度曲线与其他行条纹强度曲线进行相关系数计算的结果图;(d)为(c)图其中一帧条纹信号的相关系数曲线;(e)为计算结构沿竖直方向位移的结果图;
[0032]
图3是本发明实施例计算结构沿成像光轴方向位移的图像处理流程图。其中(a)为从第一帧条纹信号中截取出的强信号区域;(b) 为由每一帧条纹信号的结构对称中心位置的条纹强度曲线组成的新条纹信号;(c)为(b)中第一行条纹强度曲线与其他行条纹强度曲线相关运算的结果图;(d)为(c)其中一帧条纹信号的互相关曲线; (e)为计算结构沿成像光轴方向位移的结果图
[0033]
图中,1-投影灯、2-振动结构、3-二维相机、4-数据线、5-计算机。
具体实施方式
[0034]
下面结合附图及实施例对本发明做进一步说明。
[0035]
请参照图1,本发明提供一种基于投影条纹的转轴径向振动位移视觉测量装置,包括投影灯1、振动结构2、二维相机3、数据线4、计算机5。投影灯1投射方波条纹于振动结构2的表面,用以感知振动结构2的多维空间位移信息。二维相机3用以对振动结构2表面的投影条纹进行连续图像拍摄,并将记录下的条纹信号序列通过数据线 4传输到计算机5进行存储与处理。计算机5用以控制二维相机的信号采集,并且在计算机5中内置由图像处理软件模块,可对传输至计算机的条纹信号序列进行同步处理来获得结构的多维振动信号。
[0036]
在本实施例中,参考图2,为计算结构沿竖直方向位移的图像处理流程图。如图2所示,当被测结构在竖直方向上(y方向)有位移δy时,图中(d)中所示的相关系数曲线的峰值坐标会发生改变,通过能量重心法可以求取该坐标值的变化,即可求得振动结构2竖直方向上的位移信号。振动结构2沿竖直方向的位移数学关系式为:
[0037][0038]
其中δy(i)为结构第i帧沿竖直方向的位移,py(i)为第i帧条纹信号中被测结构中心线处的位置坐标,pr为参考帧条纹信号中被测结构中心线的位置坐标,n
l
为参考帧有效条纹信号的竖直方向中心距离内覆盖的像素点数,l为有效条纹信号的竖直方向覆盖的中心距离。。
[0039]
在本实施例中,参考图3,为计算结构沿成像光轴方向位移的图像处理流程图。如图3所示,当结构在沿成像光轴方向上(x方向) 有位移δx时,图中(c)中的互相关曲线峰值
坐标将产生变化,借助能量重心算法提取出结构动态信息,由各帧条纹信号互相关序列峰值坐标的变化即可求得振动结构2沿成像光轴方向的位移信号。振动结构2沿成像光轴方向的位移数学关系式为:
[0040][0041]
其中δx(i)为结构第i帧沿成像光轴方向的位移,p
x
(i)为第i帧条纹信号中被测结构中心线处互相关曲线的峰值坐标,pr为参考帧条纹信号中被测结构中心线处互相关曲线的峰值坐标,n
l
为参考帧有效条纹信号水平方向中心距离内覆盖的像素点数,l为有效条纹信号的水平方向覆盖的中心距离。。
[0042]
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1