一种等距分布子阵列系统及抗伴飞式干扰的方法
1.本发明属于雷达信号与信息处理技术领域,具体涉及一种等距分布子阵列系统及抗伴飞式干扰的方法。
背景技术:
2.伴飞式干扰(问题p1)通常由拖曳式或投掷式有源干扰设备产生,其干扰载体通常与战机共同处于主瓣内并存在一定的角度差异。运用主瓣干扰对消技术(mlc)可控制天线方向图在主瓣干扰方向形成凹口,从而实现对该类干扰增益置零。然而,在空地电子对抗过程中,战机通过运用战术、技术手段可有效压缩其与干扰设备之间的角度差异,使其亦处于主瓣方向图凹口方向,导致雷达系统大幅度地降低对战机的检测与跟踪性能。若天线系统采用大型阵列天线,主瓣凹口宽度将显著降低,当天线孔径足够大时,主瓣凹口将不再覆盖战机方向,从而使得雷达系统可以实现对战机的检测与跟踪。然而,运用稀疏孔径技术构建大型阵列天线具有阵元数量多、难以机动的特点,难以满足车载雷达设计需求。
3.由目前的稀疏阵列优化算法可知,这些算法在优化主瓣、旁瓣电平及阵列稀疏度的同时抑制了天线方向图栅瓣,无栅瓣方向图在主瓣方向上的天线增益远高于其它方向,运用该特性进行目标检测不会出现角度模糊问题,使得该类天线可以较容易地确定目标方向。然而,对于相同的主瓣宽度,无栅瓣阵列通常比有栅瓣阵列需要设置更多的天线阵元,对于大型阵列天线(孔径达到数十米或更大),两种阵列样式的阵元数量差异将变得尤为显著。为了进一步降低天线系统阵元数,我们提出了等距分布子阵列抗伴飞式干扰技术。
4.等距分布子阵列(uniformly distributed sub arrays,udsa)是一种典型的阵列样式,此处设置系统内各子阵列具有相同的阵列结构且子阵间距远大于半波。由阵列信号处理理论可知,当该系统各阵元具有相同的方向图时,其合成方向图将具有一个主瓣和多个栅瓣,且其栅瓣分布具有较强的规律性。进一步分析可知,该系统主瓣宽度由其总跨度决定,在该系统子阵数量固定条件下,可通过增加子阵间距提升主瓣分辨能力,该特性对于分辨主瓣内的目标与伴飞式干扰信号具有重要意义。然而,当子阵列间距增加时(总跨度达数十米以上),该系统将面临若干需要处理的技术问题:首先,传统的窄带雷达信号在大尺度阵列上不再保持“窄带特性”,即目标回波频带内各频点导向矢量不再相同,因此该系统需要在时频域对各路接收信号作预处理使其满足分布式天线对信号带宽的限制;其次,为了保证在外部干扰抑制过程中不破坏系统栅瓣规律性,该系统需要在各个子阵上设计相同的干扰抑制滤波器滤除旁瓣干扰,并需要保证主瓣干扰和目标获得足够增益;最后,阵列方向图栅瓣会导致角度测量模糊,需要给出相应的解决方案。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提供一种等距分布子阵列系统及抗伴飞式干扰的方法。
6.本发明的第一个目的是提供一种等距分布子阵列抗伴飞式干扰的方法,包括以下
步骤:
7.s1、将等距分布子阵列系统中各天线输入的目标回波及多个干扰信号进行时频域预处理滤至相同的窄带范围内,使得系统输入信号满足窄带条件,窄带范围内方向为θ的目标导向矢量可表示为:
[0008][0009]
其中,表示kronecher积,ad(sinθ)表示子阵间导向矢量,as(sinθ)表示子阵内部导向矢量,ad(sinθ)与as(sinθ)分别可表示为:
[0010][0011][0012]
其中,θ为角度,λ为探测信号波长,d为阵元间距,l为阵列间距,m为子阵数量,n为子阵上的阵元数量;
[0013]
s2、对步骤s1经过预处理的目标回波及多个干扰信号进行空域滤波处理,接着将处理过的目标回波及多个干扰信号输入到等距分布子阵列系统中的各子阵中,各子阵运用相同的旁瓣干扰抑制滤波器对各子阵的旁瓣干扰进行抑制,抑制过程中对主瓣进行保形,各子阵滤除旁瓣干扰后,输出的目标回波及多个干扰信号可表示为:
[0014][0015]
其中,w
slc
为子阵空域滤波器,im×m为单位矩阵,zd为旁瓣对消器输出信号,z为旁瓣对消器输入信号;
[0016]
s3、通过稀疏检测模型对子阵间的各步骤s2输出的目标回波及多个干扰信号实现目标信号检测,并运用如下优化方法对其进行求解:
[0017][0018]
其中,φ为传感矩阵,且φ=[ad(sinθ0),ad(sinθ1),
…
,ad(sinθ
i-1
)],导向矢量ad(sinθ)在sinθ域以λ/l为周期,为了避免传感矩阵列向量重复,此处在一个周期内取i个导向矢量,每个矢量对应的角度θi满足如下关系:
[0019]
θi=arcsinξi,
[0020]
ξi=ξ0+iδ,0≤i≤i-1,
[0021][0022]
其中,θ0是子阵波束中心指向,ξ0=sinθ0,对应于波束中心指正的参考正弦值,各角度正弦值ξi构成等差数列,差值为δ,其中i为角度采样数,λ为波长,此时无模糊测量区间范围为θ∈[θ0,θu),其中
[0023]
s4、通过频率捷变(fa)技术在不同的载频上对步骤s3得到的同一个目标的角度x进行多次测量并获取各自的余数,不同载频对应的余数集合之间的关系满足如下同余方程
组:
[0024][0025]
其中,k代表fa过程中的不同载波数量,ik为无模糊角度采样个数;
[0026]
s5、基于模糊坐标聚类算法对步骤s4中的目标角度坐标xk进行处理,得到目标坐标均值。
[0027]
优选的,步骤s1中,所述时频域预处理包括以下步骤:
[0028]
为等距分布子阵列系统中的各天线接收机分别设置了一组相互毗邻、并覆盖全距离段的距离选通信号,每个距离选通信号宽度按照雷达距离分辨力设定,并为每个距离选通信号对应设置一个窄带滤波器,使各窄带滤波器工作在相同频点,当关注的目标速度未知时,该频点设置于零多普勒频移处,当速度已存在估计值时,频点设置于相应的多普勒频移处,各天线接收机接收到的多普勒频移不敏感的目标回波及多个干扰信号通过对应的距离选通信号以及窄带滤波器滤波至相同的窄带范围内。
[0029]
优选的,步骤s1中,所述时频域预处理包括以下步骤:
[0030]
为等距分布子阵列系统中的各天线接收机分别设置了一组相互毗邻、并覆盖全距离段的距离选通信号,每个距离选通信号宽度按照雷达距离分辨力设定,并为每个距离选通信号对应设置一组滤波器组,滤波器组的频率覆盖范围与目标信号的无模糊测频范围相同,各天线接收机接收到的多普勒频移敏感的目标回波及多个干扰信号通过对应的距离选通信号以及窄带滤波器滤波至相同的窄带范围内。
[0031]
优选的,步骤s2中,所述空域滤波处理包括以下步骤:对等距分布子阵列系统中的空域滤波器作加窗处理,步骤s1经过预处理的目标回波及多个干扰信号通过加窗处理的空域滤波器进行空域滤波处理。
[0032]
优选的,步骤s2中,所述旁瓣干扰抑制滤波器通过无穷范数最小化的优化模型设计得到,所述优化模型以目标方向形成单位增益和副瓣干扰方向形成零增益为约束条件,以副瓣最高电平最小化为目标函数,其数学表达式如下所示:
[0033][0034][0035]
其中,θc是期望的目标方向,θj是干扰信号方向,aj是副瓣干扰方向角度坐标集合,as是预设的副瓣方向角度采样集合。
[0036]
优选的,步骤s5中,所述模糊坐标聚类算法对于目标角度坐标x
k,p
的处理方法如下:
[0037]
s51、通过预置载频,使得步骤s4中各载频对应的模数ik(k=1,2,
···
,k)互质,则无模糊角度测量范围扩展为在k个不同的载频上分别按照稀疏检测模型进行稀疏检测,得到一组坐标余数r1,r2,
···
,rk;
[0038]
s52、在无模糊角度测量范围内,与任意余数rk对应的目标角度坐标分别为x
k1
,x
k2
,
···
,x
kpk
,其中,x
kp
=rk+(p-1)ik;
[0039]
s53、设置迭代次数初值n=0,并设置与各载频关联的目标角度初始位置分别为xk(n)=rk,k1,2,
···
,k,计算目标坐标聚类代价函数,其中,
[0040][0041]
通过搜索该聚类代价函数最小值,可确定目标角度值。
[0042]
本发明的第二个目的是提供一种等距分布子阵列系统,该系统由m个子阵组成,各阵列之间的距离为l,每个子阵列上有n个等距分布的全向天线阵元,其间距为d,系统的载波波长为λ。
[0043]
本发明与现有技术相比,其有益效果在于:
[0044]
(1)本发明提供的等距分布子阵列抗伴飞式干扰的方法在天线单元数目固定的情形下,可通过增加系统子阵列间距有效提升系统分辨能力,该特性为对抗与目标邻近的伴飞式干扰提供了一种经济的解决方案;
[0045]
(2)本发明在主瓣干扰场景下具有较高的目标与干扰分辨能力、目标检测能力及角度估计精度。
附图说明
[0046]
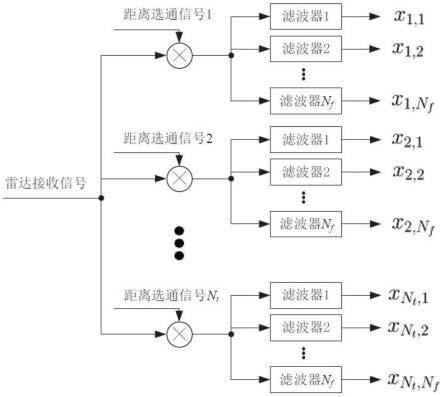
图1为本发明实施例中的“目标信号以及干扰信号为多普勒频移不敏感”信号的预处理原理图;
[0047]
图2为本发明实施例中的目标信号以及干扰信号为“多普勒频移敏感”信号的预处理原理图;
[0048]
图3为稀疏检测算法的矩阵相关系数μ(φ)和高斯噪声矩阵的相关系数对比图;
[0049]
其中,矩阵相关系数μ(φ)为菱形标志点,高斯噪声矩阵的相关系数为空心箱和十字绘制的箱线图点;
[0050]
图4为本发明实施例中的udsa系统角度测量模糊性及其解模糊原理图;
[0051]
图5为本发明实施例中的udsa信号处理系统图;
[0052]
图6为ula与udsa的天线方向图;
[0053]
图7为ula系统与udsa系统目标与干扰导向矢量相关系数对比图;
[0054]
图8为ula与udsa理论性能对比图;
[0055]
图9为不同旁瓣抑制方法的主瓣失真度图;
[0056]
图10为四种udsa系统参数对稀疏检测算法进行仿真的仿真性能对比图;
[0057]
图11为在不同snr条件下,msjnr、mese及稀疏检测方法性能roc曲线对比图;
[0058]
图12为角度坐标估计性能图。
具体实施方式
[0059]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围
完整的传达给本领域的技术人员。
[0060]
一种等距分布子阵列抗伴飞式干扰的方法,具体包括以下步骤:
[0061]
s1、将等距分布子阵列系统中各天线输入的目标回波及多个干扰信号进行时频域预处理滤至相同的窄带范围内,使得系统输入信号满足窄带条件,窄带范围内方向为θ的目标导向矢量可表示为:
[0062][0063]
其中,表示kronecher积,ad(sinθ)表示子阵间导向矢量,as(sinθ)表示子阵内部导向矢量,二者可分别表示为
[0064][0065][0066]
其中,θ为角度,λ为探测信号波长,d为阵元间距,l为阵列间距,m为子阵数量,n为子阵上的阵元数量;
[0067]
根据雷达探测信号的频带特性,可将目标回波及多个干扰信号划分为“多普勒频移不敏感”信号和“多普勒频移敏感”信号,下面分别对这两种信号的预处理方法分析:
[0068]
当目标回波及多个干扰信号为“多普勒频移不敏感”信号时,时频域预处理流程如图1所示,具体包括以下步骤:
[0069]
为等距分布子阵列系统中的各天线接收机分别设置了一组相互毗邻、并覆盖全距离段的距离选通信号,每个距离选通信号宽度按照雷达距离分辨力设定,并为每个距离选通信号对应设置一个窄带滤波器,使各窄带滤波器工作在相同频点,当关注的目标速度未知时,该频点设置于零多普勒频移处,当速度已存在估计值时,频点设置于相应的多普勒频移处,各天线接收机接收到的多普勒频移不敏感的目标回波及多个干扰信号通过对应的距离选通信号以及窄带滤波器滤波至相同的窄带范围内,该信号处理方法在保证距离分辨力的同时,保证了系统窄带接收条件。同时,由于该信号样式对多普勒频移不敏感,保证了对不同多普勒频移的信号皆具备检测能力。
[0070]
当目标回波及多个干扰信号为“多普勒频移敏感”信号时,“pc+mtd”及“pd”体制雷达虽然频带覆盖范围(梳状频谱包络宽度)难以满足“窄带条件”,但其单根谱线是窄带的,因此,我们运用图2所示的信号处理架构提取单根谱线实现窄带化处理,时频域预处理具体包括以下步骤:
[0071]
为等距分布子阵列系统中的各天线接收机分别设置了一组相互毗邻、并覆盖全距离段的距离选通信号,每个距离选通信号宽度按照雷达距离分辨力设定,以保证距离分辨力和作用距离全覆盖能力,并为每个距离选通信号对应设置一组滤波器组,滤波器组的频率覆盖范围与目标信号的无模糊测频范围相同,以保证对各种多普勒频移皆具备检测能力,各天线接收机接收到的多普勒频移敏感的目标回波及多个干扰信号通过对应的距离选通信号以及窄带滤波器滤波至相同的窄带范围内。
[0072]
s2、为了降低旁瓣电平,对步骤s1经过预处理的目标回波及多个干扰信号进行空域滤波处理,具体为对等距分布子阵列系统中的空域滤波器作加窗处理,步骤s1经过预处理的目标回波及多个干扰信号通过加窗处理的空域滤波器进行空域滤波处理。接着将处理
过的目标回波及多个干扰信号输入到等距分布子阵列系统中的各子阵中,如果运用自适应滤波器(如capon滤波器)进行外部干扰抑制时,滤波器将在各干扰方向形成凹口,当外部存在主瓣干扰时,自适应滤波凹口将改变主瓣形状并导致目标增益下降,为了保持主瓣对目标的增益,各子阵运用相同的旁瓣干扰抑制滤波器对各子阵的旁瓣干扰进行抑制,抑制过程中对主瓣进行保形,各子阵滤除旁瓣干扰后,输出的目标回波及多个干扰信号可表示为:
[0073][0074]
上述旁瓣干扰抑制滤波器通过无穷范数最小化的优化模型设计得到,所述优化模型以目标方向形成单位增益和副瓣干扰方向形成零增益为约束条件,以副瓣最高电平最小化为目标函数,其数学表达式如下所示:
[0075][0076][0077]
其中,θc是期望的目标方向,aj是副瓣干扰方向角度坐标集合,as是预设的副瓣方向角度采样集合,该优化模型在阵列结构和旁瓣干扰方向已估计的条件下,可通过凸优化方法得到全局最优解;
[0078]
s3、经过研究发现,在伴飞式干扰背景下,等距分布子阵列系统系统中目标与主瓣干扰信号导向矢量呈现弱相关性,因此,zd信号目标与干扰具备稀疏特性,基于该特性,通过稀疏检测模型对子阵间的各步骤s2输出的目标回波及多个干扰信号实现目标信号检测,并运用如下优化方法对其进行求解:
[0079][0080]
其中,φ为传感矩阵,且φ=[ad(sinθ0),ad(sinθ1),
…
,ad(sinθ
i-1
)],导向矢量ad(sinθ)在sinθ域以λ/l为周期,为了避免传感矩阵列向量重复,此处在一个周期内取i个导向矢量,每个矢量对应的角度θi满足如下关系:
[0081][0082]
其中,φ为传感矩阵,且φ=[ad(sinθ0),ad(sinθ1),
…
,ad(sinθ
i-1
)],导向矢量ad(sinθ)在sinθ域以λl为周期,为了避免传感矩阵列向量重复,此处在一个周期内取i个导向矢量,每个矢量对应的角度θi满足如下关系:
[0083]
θi=arcsinξi,
[0084]
ξi=ξ0+iδ,0≤i≤i-1,
[0085][0086]
其中θ0是子阵波束中心指向,ξ0=sinθ0对应于波束中心指正的参考正弦值,各角度正弦值ξi构成等差数列,差值为δ,其中i为角度采样数,λ为波长,此时无模糊测量区间范围为θ∈[θ0,θu),其中
[0087]
对于稀疏检测模型,其可解性可由下式保证
[0088][0089]
其中,k是可检测的信号数量,矩阵相关系数μ(φ)表征矩阵φ列向量之间的相关度;
[0090]
s4、当udsa系统阵列间距l较大时,稀疏检测模型的无模糊测角区间将远小于子阵列主瓣宽度,因此,对于子阵列主瓣内角度为θx(θx满足sinθx=sinθr+qλl,0≤r《i,q∈z)的目标回波信号,稀疏检测模型解算得出的角度将为θr,其中r为x关于i的余数:x≡r(mod i).,
[0091]
因此,运用该检测算法对目标进行定位时,对于不同的q值,该稀疏检测算法将解出相同的余数r,该问题即角度测量模糊问题,为了消除角度测量模糊,通过fa技术在不同的载频上对步骤s3得到的同一个目标回波信号的角度θx进行多次测量并获取各自的余数,不同载频对应的余数集合之间的关系满足x
k,p
≡rk(modik),其中k∈{1,2,
···
,k},p∈{1,2,
···
,pk},对于不同的ik,可获取相应的角度坐标余数并形成同余方程组如下所示:
[0092][0093]
其中,k代表fa过程中的不同载波数量,ik为无模糊角度采样个数;而udsa系统角度测量模糊性及其解模糊原理如图4所示,由该图可知各坐标集在真实目标对应的坐标位置处皆存在一个测量值。因此,在多载频系统单值测量范围内,真值点为各坐标集坐标的“凝聚点”,坐标集中的其余点为“发散点”,为了求取该凝聚点,此处选取坐标凝聚方差为目标函数;
[0094]
s5、基于模糊坐标聚类算法对步骤s4中的目标角度坐标x
k,p
进行处理,得到目标坐标均值,所述模糊坐标聚类算法对于目标角度坐标x
k,p
的处理方法具体如下:
[0095]
s51、通过预置载频,使得步骤s4中各载频对应的模数ik(k=1,2,
···
,k)互质,则无模糊角度测量范围扩展为在k个不同的载频上分别按照稀疏检测模型进行稀疏检测,得到一组坐标余数r1,r2,
···
,rk;
[0096]
s52、在无模糊角度测量范围内,与任意余数rk对应的目标角度坐标分别为x
k1
,x
k2
,
···
,x
kpk
,其中,x
kp
=rk+(p-1)ik;
[0097]
s53、设置迭代次数初值n=0,并设置与各载频关联的目标角度初始位置分别为xk(n)=rk,k1,2,
···
,k,计算目标坐标聚类代价函数,其中,
[0098][0099]
通过搜索该聚类代价函数最小值,可确定目标角度值。
[0100]
如图5所示,本发明实施例还提供了一种等距分布子阵列的信号处理系统,由m个子阵组成,各阵列之间的距离为l,每个子阵列上有n个等距分布的全向天线阵元,其间距为d,系统的载波波长为λ,目标/干扰与信号处理系统之间的距离大于系统跨度。
[0101]
当对本发明实施例提供的udsa系统中的空域滤波器作加窗处理,加窗后主瓣宽度有所展宽,然而栅瓣间距不变。此处采用泰勒窗控制方向图旁瓣可得到如图6所示的udsa天线系统与ula天线系统方向图(按照表1设置天线参数)。
[0102]
表1 ula及udsa阵列参数
[0103][0104]
通过对比可知,天线阵元数量相等的条件下,udsa系统比ula系统可获得更窄的主瓣宽度。因此,udsa系统可通过增加阵列间距提升目标与干扰的分辨能力(此处分辨能力提升无需增加天线单元,仅需增加阵列栅瓣数量)。
[0105]
为了分析本发明实施例提供的等距分布子阵列的信号处理系统(udsa系统)能达到理论性能,对本发明实施例提供的系统与ula系统在主瓣伴飞式干扰背景下的的最优滤波性能和空间谱估计性能下界(crb)分别进行分析。
[0106]
由分析可知,阵列天线主瓣滤波性能主要取决于主瓣干扰与目标导向矢量的相关性。
[0107]
运用表1所示参数对ula与udsa两种系统的目标相关系数进行计算,其结果如图7所示。由该图可知,当干扰信号接近目标时,udsa系统的导向矢量相关系数远小于ula系统,因此udsa系统在对抗伴飞式干扰过程中可获得更高的信噪比。然而,当干扰信号远离目标时,udsa系统会在若干方向产生较大的相关峰,当干扰信号位于相关峰所在的角度时udsa系统输出信干噪比将显著下降。
[0108]
通过对导向矢量相关系数表达式进行分析可知,该相关峰出现的位置与载波波长λ有关,因此本发明实施例中的实际udsa系统设计时,通过运用一组不同的载波波长实施对空探测及空域滤波,从而有效避开相关峰值。
[0109]
图7(b)的上下两个子图分别示出了同一udsa阵列在不同的载波波长条件下相关峰的位置。由该图可知,当载波波长变化时,相关峰位置亦将相应地发生变化,对于给定的一组载波,只要在其中一种载波波长作用下干扰与目标呈现弱相关性,系统即可得到较高的信干噪比,实现对目标的检测。
[0110]
udsa系统目标与干扰信号导向矢量的弱相关特性使其对抗主瓣伴飞式干扰成为可能。将表1所示参数计算得出udsa系统及ula系统输出信号的最大信干噪比及空间谱估计的crb。图8示出了当目标方向固定时,两种系统的理论性能与干扰方向之间的关系曲线,由
该图可知,udsa系统在处理伴飞式干扰问题上具有更优的理论性能。
[0111]
此外,我们还对本发明实施例经过步骤s2的旁瓣干扰抑制滤波器的处理效果与步骤s2不采用旁瓣干扰抑制滤波器处理而是采用msjnr方法的干扰抑制处理的效果进行对比研究,两者干扰抑制方向图分别如图9(a)与图9(b)所示,该图表明基于本发明实施例步骤s2的优化模型的干扰抑制方法可有效保证天线主瓣不发生形变,且该方向图具有较低的副瓣电平,这些优点是msjnr方法所不具备的。
[0112]
为了评估本发明实施例提供的方法和系统的工作性能,分别对方法和系统在主瓣干扰背景下的目标分辨性能、目标检测性能及角度估计性能进行仿真。udsa系统天线配置参数及其对应的理论性能参数如表2所示。根据仿真需要,此处假设天线远场存在一个目标、两个主瓣积极干扰、两个旁瓣积极干扰,天线主瓣指向5
°
方向,目标角度坐标设置为3.2885
°
,干扰角度坐标分别设置为-18.3187
°
,3.2407
°
,3.3244
°
及15.1114
°
。该系统发射的雷达探测波形为简单脉冲,各干扰信号波形为相互独立的高斯白噪声。
[0113]
表2系统参数设置
[0114][0115]
udsa系统阵列间距对分辨性能的影响
[0116]
对于相同的目标与干扰环境,当天线阵列间距不同时,系统接收到的信号将表现出不同的稀疏性。此处设置目标回波的信噪比为snr=20db,干扰信号的干噪比为jnr=25db,并分别按照表2所示的四种udsa系统参数对稀疏检测算法进行仿真,可得到图10所示的检测结果,图10表明,通过增加udsa系统子阵列之间的间距可有效提升系统对目标与主瓣干扰的分辨能力。
[0117]
udsa系统检测性能
[0118]
为了评估udsa系统的目标检测性能,此处在表2所示的第iv组系统参数条件下,分别运用msjnr,最大熵谱估计(maximum entropy spectrum estimation,mese)和本文提出的方法对目标进行检测。系统在不同的信噪比条件下,运用上述检测方法分别做5000次monte carlo仿真,图11显示了接收机操作持性(receiver operating characteristic,roc)曲线,该曲线展示了在不同snr条件下的检测概率pd与虚警概率pf之间的关系。这些曲线表明我们提出的方法与msjnr方法在低信噪比snr=-8db条件下皆具有较好的性能,而在snr=-5db,snr=-2db及sn=1db时,我们提出的方法检测性能均优于其余方法。
[0119]
udsa系统角度估计性能
[0120]
为了评估udsa系统的角度估计性能,此处分别按照表2所示的第iii组与第iv组系统参数设置阵列参数及载波波长,对角度估计性能进行仿真分析。在不同的信噪比条件下,
运用角度坐标解模糊算法估计目标角度,图12(a)-(c)分别示出了角度估计算法的解模糊成功概率、误差均值与误差方差(含方差下界,即crb)。由该图可知,基于坐标聚类的角度解模糊算法可在主瓣干扰背景下有效地解决角度测量模糊问题,其角度估计精度随着目标回波信噪比提升逐渐逼近该系统角度估计的crb。
[0121]
综上所述,本发明实施例提供的等距分布子阵列抗伴飞式干扰的方法在天线单元数目固定的情形下,可通过增加系统子阵列间距有效提升系统分辨能力,该特性为对抗与目标邻近的伴飞式干扰提供了一种经济的解决方案;且在主瓣干扰场景下具有较高的目标与干扰分辨能力、目标检测能力及角度估计精度。
[0122]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1