一种冗余旋转惯导系统两位置初始粗对准方法
1.本发明涉及一种冗余旋转惯导系统两位置初始粗对准方法,适用于冗余旋转惯导系统初始粗对准的场合。
技术背景
2.惯导系统因其自主性高、抗干扰能力强并且可以提供丰富的导航参数而被广泛的应用于航空、航天、航海和陆用车辆等领域。而其作为保障武器精确打击的核心导航系统的必要前提是保证高可靠性和高精度。提高惯导系统的可靠性可以通过冗余配置惯性器件来实现,这种由惯性器件冗余配置而组成的器件级冗余惯性导航系统(rins)已经成为了研究热点。器件级的 rins相对于传统的三轴正交配置的ins可以大幅提高系统的可靠性,而其相比于系统级的rins又能在保证可靠性相当的情况下降低成本、减小体积和重量。为了在实现系统高可靠性的同时实现高精度,旋转调制技术可以在惯性器件精度不变的情况下,通过将imu绕单轴或多轴有规律的旋转将惯性器件的误差调制成周期性地变化信号使其相消,从而达到降低系统导航误差累积的目的。
3.初始对准技术是惯导系统的关键技术之一,惯导系统进入导航工作状态之前必须进行初始对准。初始对准的作用是确定载体在初始时刻的姿态和航向,从而建立载体坐标系到导航坐标系(地理坐标系)之间的方向余弦阵,初始对准的精度直接影响导航精度。目前,传统的捷联惯导初始对准技术已经较为成熟,但是其在静基座下初始对准的可观测性较差,这直接影响了初始对准的快速性和精度。随着多位置初始对准的研究发展,发现多位置对准技术也可以应用于解析对准,而多位置对准只能使用转停状态下的惯性器件输出的数据。谭彩铭(标题:捷联惯导系统最简多位置解析对准,期刊:北京航空航天大学学报,作者:谭彩铭、王宇、苏岩、朱欣华,时间:2015年41卷9期1645-1650页)等人提出了最简多位置解析对准方法,对多位置解析对准所需最小条件进行了讨论,并指出理论上任意两位置即可解算出imu 的偏置,给出了解析计算方法,并通过仿真实例进行了说明和验证。丁磊香 (标题:捷联惯导系统最简多位置解析对准改进算法,期刊:中国惯性技术学报,作者:丁磊香、许厚泽、王勇、柴华、蔡小波,时间:2016年24卷 3期296-298页)等人在最简多位置解析对准方法基础上进行了改进,推导了imu偏置的解析表达式,得到了任意多位置imu偏置的解析解,解析方法计算简单,解决了先前解析式对准方法存在的受先验信息影响较大的问题。
4.目前并无有效的经过验证能估计出冗余旋转惯导系统的惯性器件的常值偏置,且估计出的常值偏置可用于惯性器件的测量信息的补偿,补偿后的测量信息又可用于冗余旋转惯导系统的粗对准的方法。
技术实现要素:
5.本发明的技术解决问题是:针对目前冗余旋转惯导系统初始对准并未发现有研究的现状,提出了一种冗余旋转惯导系统两位置初始粗对准方法。本发明方法通过惯性器件
组合的方式构造惯性器件的常值零偏与冗余配置相关的解析表达式,可以估计出惯性器件的常值零偏并用于惯性器件的测量信息的补偿,补偿后的测量信息用于冗余旋转惯导系统的粗对准,在较大程度上提高了初始对准的精度。
6.本发明的技术解决方案:
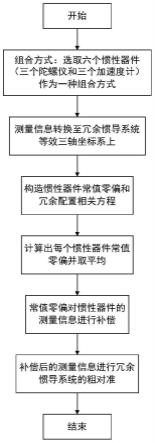
7.首先选取六个惯性器件(三个陀螺仪和三个加速度计)作为一种组合方式,将选取的惯性器件的测量信息转换至冗余旋转惯导系统等效三轴正交坐标系上,通过解析法得到惯性器件的常值零偏与冗余配置相关的三个方程,利用冗余旋转惯导系统两位置下所选取的惯性器件的测量信息计算出对应惯性器件的常值零偏。然后将不同组合下得到的每个惯性器件对应的常值零偏取平均作为该惯性器件的常值零偏,利用该常值零偏对惯性器件的测量信息进行补偿。最后利用补偿后的测量信息进行冗余旋转惯导系统的粗对准,进而提高冗余旋转惯导系统初始对准精度。具体步骤如下:
8.(1)以正四面体冗余惯导为例,选取4种组合方式里面的一种进行构造惯性器件的常值零偏与冗余配置相关的解析表达式,以加速度计为例,其测量到的线加速度转换至冗余旋转惯导系统等效三轴正交坐标系上:
[0009][0010]
其中,f1、f2、f3分别表示冗余惯导的加速度计1、2、3敏感到的线加速度值,分别表示转换至冗余旋转惯导系统等效三轴正交坐标系上的线加速度值,正四面体配置的冗余惯导,安装框架是正四面体结构,底面是正三角形,3个侧面安装面相同,均是等腰三角形,侧面和底面的夹角均为α,β3是侧面的一个加速度计的测量轴在xsoys平面的投影和oxs轴的夹角, o-x
syszs
是imu坐标系;
[0011]
(2)构造惯性器件常值零偏和冗余配置相关的解析表达式:
[0012][0013]
其中,a1、a2、 a3、ε1、ε2、ε3分别表示加速度计和陀螺仪1、2、3的常值零偏,g是载体所在位置的重力加速度,ω
ie
是地球自转角速度;
[0014]
a中的ua、va、wa、u
ε
、v
ε
、w
ε
可用下式分别表示:
[0015]k11
xa+k
21
ya+k
31
za=ua,k
12
xa+k
22
ya+k
32
za=va,k
13
xa+k
23
ya+k
33
za=waꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0016]k11
x
ε
+k
21yε
+k
31zε
=u
ε
,k
12
x
ε
+k
22yε
+k
32zε
=v
ε
,k
13
x
ε
+k
23yε
+k
33zε
=w
ε
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0017]
b中的l是载体所在位置的纬度,xa、ya、za、x
ε
、y
ε
、z
ε
可用下式分别表示:
[0018]k11
f1+k
12
f2+k
13
f3=xa,k
21
f1+k
22
f2+k
23
f3=ya,k
31
f1+k
32
f2+k
33
f3=zaꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0019]k11
ω1+k
12
ω2+k
13
ω3=x
ε
,k
21
ω1+k
22
ω2+k
23
ω3=y
ε
,k
31
ω1+k
32
ω2+k
33
ω3=z
ε
ꢀꢀ
(6)
[0020]kij
(i=1,2,3;j=1,2,3)中的各个元素可用下式表示:
[0021][0022]
其中,ω1、ω2、ω3分别表示冗余惯导的陀螺仪1、2、3敏感到的角速度, f1、f2、f3分别表示冗余惯导的加速度计1、2、3敏感到的线加速度。
[0023]
本发明所述的冗余惯导不仅是正四面体冗余惯导,还包括三轴正交多表结构和非正交结构,三轴正交多表结构包括三轴六表结构、三轴九表结构等,非正交结构包括斜置冗余结构、圆锥体结构、四棱锥体结构、四面体结构、十二面体结构、四交叉构型等。
[0024]
本发明的发明原理是:首先选取六个惯性器件(三个陀螺仪和三个加速度计)作为一种组合方式,将选取的惯性器件的测量信息转换至冗余旋转惯导系统等效三轴正交坐标系上,通过解析法得到惯性器件的常值零偏与冗余配置相关的三个方程,利用冗余旋转惯导系统两位置下所选取的惯性器件的测量信息计算出对应惯性器件的常值零偏。然后将不同组合下得到的每个惯性器件对应的常值零偏取平均作为该惯性器件的常值零偏,利用该常值零偏对惯性器件的测量信息进行补偿。最后利用补偿后的测量信息进行冗余旋转惯导系统的粗对准,进而提高冗余旋转惯导系统初始对准精度。
[0025]
本发明的方案与现有方案比,主要优点在于:解决了冗余旋转惯导系统初始对准没有研究的问题。
附图说明
[0026]
图1具体实施方案图;
[0027]
图2正四面体冗余惯导冗余配置三维坐标表示图;
[0028]
图3惯性敏感器组合方式;
[0029]
图4冗余惯导常值零偏仿真结果;
[0030]
图5冗余惯导常值零偏结果对比;
[0031]
图6初始粗对准结果对比;
[0032]
图7横滚角对准差值对比图;
[0033]
图8俯仰角对准差值对比图;
[0034]
图9航向角对准差值对比图
[0035]
图10导航解算姿态误差;
[0036]
图11导航解算速度误差;
[0037]
图12导航解算位置误差。
具体实施方案
[0038]
本发明的具体实施方案如图1所示,正四面体冗余惯导冗余配置三维坐标表示如图2所示,具体实施步骤如下:
[0039]
(1)以正四面体冗余惯导为例,选取4种组合方式里面的一种进行构造惯性器件的
常值零偏与冗余配置相关的解析表达式,4种组合方式如图3 所示,以加速度计为例,其测量到的线加速度转换至冗余旋转惯导系统等效三轴正交坐标系上:
[0040][0041]
其中,f1、f2、f3分别表示冗余惯导的加速度计1、2、3敏感到的线加速度值,分别表示转换至冗余旋转惯导系统等效三轴正交坐标系上的线加速度值,正四面体配置的冗余惯导,安装框架是正四面体结构,底面是正三角形,3个侧面安装面相同,均是等腰三角形,侧面和底面的夹角均为α,β3是侧面的一个加速度计的测量轴在xsoys平面的投影和oxs轴的夹角, o-x
syszs
是imu坐标系;
[0042]
(2)构造惯性器件常值零偏和冗余配置相关的解析表达式:
[0043][0044]
其中,a1、a2、 a3、ε1、ε2、ε3分别表示加速度计和陀螺仪1、2、3的常值零偏,g是载体所在位置的重力加速度,ω
ie
是地球自转角速度;
[0045]
a中的ua、va、wa、u
ε
、v
ε
、w
ε
可用下式分别表示:
[0046]k11
xa+k
21
ya+k
31
za=ua,k
12
xa+k
22
ya+k
32
za=va,k
13
xa+k
23
ya+k
33
za=waꢀꢀꢀꢀꢀꢀ
(3)
[0047]k11
x
ε
+k
21yε
+k
31zε
=u
ε
,k
12
x
ε
+k
22yε
+k
32zε
=v
ε
,k
13
x
ε
+k
23yε
+k
33zε
=w
ε
ꢀꢀꢀꢀꢀꢀ
(4)
[0048]
b中的l是载体所在位置的纬度,xa、ya、za、x
ε
、y
ε
、z
ε
可用下式分别表示:
[0049]k11
f1+k
12
f2+k
13
f3=xa,k
21
f1+k
22
f2+k
23
f3=ya,k
31
f1+k
32
f2+k
33
f3=zaꢀꢀꢀꢀꢀꢀ
(5)
[0050]k11
ω1+k
12
ω2+k
13
ω3=x
ε
,k
21
ω1+k
22
ω2+k
23
ω3=y
ε
,k
31
ω1+k
32
ω2+k
33
ω3=z
ε (6)
[0051]kij
(i=1,2,3;j=1,2,3)中的各个元素可用下式表示:
[0052][0053]
其中,ω1、ω2、ω3分别表示冗余惯导的陀螺仪1、2、3敏感到的角速度, f1、f2、f3分别表示冗余惯导的加速度计1、2、3敏感到的线加速度。
[0054]
为了验证本发明方法的有效性和优越性,选取三组位置进行仿真验证,仿真的条件如下:仅考虑常值零偏误差,重力加速度为g=9.8m/s2,地球自转角速度为ω
ie
=15
°
/h,纬度为l=40
°
,加速度计的常值零偏为 [a
1 a
2 a
3 a4]
t
=[1 1 1 1]
t
×
10-4
g,陀螺仪的常值
零偏为 [ε
1 ε
2 ε
3 ε4]
t
=[0.01 0.01 0.01 0.01]
t
(
°
)/h,加速度计的测量白噪声为陀螺仪的测量白噪声为其仿真结果如图4所示,冗余旋转惯导系统的常值零偏可以被较好的估计出来,陀螺仪的常值零偏误差在1%以内,加速度计的常值零偏误差基本在5%以内。为了进一步验证方法的有效性,在仿真验证的基础上做了实物转台实验,转台实验包括冗余旋转惯导系统的常值零偏估计实验、初始粗对准实验和静基座导航实验。由于分立式标定的结果是目前公认比较准确的,所以转台实验估计出的冗余旋转惯导系统常值零偏结果和分立式标定的结果作对比可以在一定程度上说明结果的准确性,结果如图5所示。将估计出的常值零偏对惯性器件的测量信息进行补偿,原始数据对准结果及补偿后对准结果和真实值的比较如图6所示;为了使结果比较更明显,将补偿后粗对准的姿态角结果和真实值的差值及原始数据粗对准的姿态角结果和真实值的差值画在同一张图里面,横滚角、俯仰角和航向角的差值比较如图7-9所示,其中original data曲线代表原始数据粗对准值和真实值的差值,after calibration 1代表用第一组位置估计出的冗余旋转惯导系统常值零偏对惯性器件的测量信息进行补偿后的粗对准值和真实值的差值,after calibration 2代表用第二组位置估计出的冗余旋转惯导系统常值零偏对惯性器件的测量信息进行补偿后的粗对准值和真实值的差值,after calibration 3代表用第三组位置估计出的冗余旋转惯导系统常值零偏对惯性器件的测量信息进行补偿后的粗对准值和真实值的差值;从图7和图8及图6可以看出,补偿后粗对准值的横滚角和俯仰角相比于原始数据的粗对准值差别不大或甚至有些效果要差于原始数据的粗对准值。而对于航向角来说,从图9和图6中可以看出补偿后的粗对准值要明显好于原始数据的粗对准值。为了进一步验证方法的有效性,将冗余旋转惯导放置于转台上连续采集1小时的数据进行静基座导航实验,分别对原始数据和补偿后的姿态、速度和位置变化进行解算,结果如图10-12所示。从图10可以看出,补偿后的冗余旋转惯导的横滚角、俯仰角和航向角的精度和稳定性更高;从图11可以看出,原始数据解算出的东向速度和北向速度出现了很大的偏移,而补偿后解算出的结果的稳定性更好,并且精度有很大的提升;如图12所示,补偿后纬度误差从0.1152
°
降低至0.0077
°
,经度误差从0.9374
°
降低至 0.0199
°
;实验结果表明,惯性器件的测量信息补偿有效的提高了导航精度。
[0055]
因此,本发明方法很好地解决了冗余旋转惯导系统的常值偏置估计问题,同时提好了粗对准的精度,为冗余旋转惯导系统初始对准的进一步研究提供了技术基础。
[0056]
本发明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1