一种基于计算成像的多光谱相机
1.本发明属于多光谱成像技术领域,涉及一种基于计算成像的多光谱相机。
背景技术:
2.多光谱成像技术是20世纪70年代提出的一种成像技术,通过光谱分离元件将入射的全波段/宽波段光信号分成若干波段,可同时获取探测目标的光谱特征和空间图像信息,因此该成像技术在尖端科研探索(如月球表面测绘),军事应用(如敌前侦察),生物医学应用(如肿瘤检测)等方面应用前景广阔。
3.但是现有多光谱相机具有下列一个或多个缺点:1,造价昂贵;2,成像速度慢,各个光谱图像难以时空一致;3,体积庞大;4,光谱数量少。
4.多光谱成像分为主动式和被动式。主动式为利用相机上光源照明成像物体,利用阵列式探测器(如电荷耦合器件(ccd,charge-coupled device)、互补金属氧化物半导体(cmos,complementary metal oxide semiconductor))获得物体空间信息,实现照相功能。被动式为利用太阳光等自然光(复合光,无光谱信息)照明成像物体,同样利用阵列式探测器获得物体空间信息。为了提高分辨率,阵列式探测器通常有百万像素以上,因此工艺复杂,造价昂贵。一般手机、相机使用的硅探测器由于生产规模大,技术较成熟,成本已大大降低,但为实现光谱分辨,制作窄带单波长探测器,使用其他材料为基底的阵列式探测器成本极其昂贵。若不使用窄带单波长探测器,为获得光谱信息,需将复合光分光或滤光成单色光,分光或滤光器件可以放在光源处,也可以放在阵列式探测器处。常用的分光器件为棱镜、光栅等,此器件可实现无极分光,因此光谱数量较多,但是体积较庞大,而且需要对除波长维(λ)和长度维(x)的另一维度(y)扫描,因此成像速度较慢;常用的滤光器件为轮转滤光片、线性渐变滤光片、声光可调谐滤光片等,滤光器件可用光谱数量较少,而且转换滤光波长需要大量时间(即λ波长维扫描),因此成像速度慢,各个光谱图像难以时空一致。
5.因此,如何同时实现低成本、成像速度快、体积小、光谱数量多的多光谱照相机,成为了亟待解决的关键问题。
技术实现要素:
6.为了解决现有技术中存在的上述问题,本发明提供了一种基于计算成像的多光谱相机。本发明要解决的技术问题通过以下技术方案实现:
7.本发明实施例提供了一种基于计算成像的多光谱相机,所述多光谱相机包括:依次设置的光源、结构光产生装置、透镜组、多光谱探测器、数据采集装置和数据处理装置,或者依次设置的所述透镜组、所述结构光产生装置、所述多光谱探测器、所述数据采集装置和所述数据处理装置。
8.在本发明的一个实施例中,当所述多光谱相机为主动式时:
9.所述光源,用于发出均匀光;
10.所述结构光产生装置,用于将所述均匀光转换成结构光;
11.所述透镜组,用于将所述结构光聚焦至被拍摄物体上;
12.所述多光谱探测器,用于将所述被拍摄物体反射的光转换成光电信号;
13.所述数据采集装置,用于采集所述多光谱探测器转换的所述光电信号;
14.所述数据处理装置,用于将所述数据采集装置采集到的光电信号还原成二维或三维图像。
15.在本发明的一个实施例中,当所述多光谱相机为被动式时,自然光照射至被拍摄物体上,得到漫反射光:
16.所述透镜组,用于将所述漫反射光聚焦至所述结构光产生装置上;
17.所述结构光产生装置,用于将所述漫反射光转换成结构光;
18.所述多光谱探测器,用于将所述结构光转换成光电信号;
19.所述数据采集装置,用于采集所述多光谱探测器转换的所述光电信号;
20.所述数据处理装置,用于将所述数据采集装置采集到的光电信号还原成二维或三维图像。
21.在本发明的一个实施例中,所述结构光产生装置包括空间光调制器、数字微镜阵列或者光源阵列。
22.在本发明的一个实施例中,所述结构光包括哈达玛基底光、傅里叶基底光或者机光斑。
23.在本发明的一个实施例中,所述多光谱探测器包括自滤光式多波长窄带探测器或者多波长窄带探测器阵列。
24.在本发明的一个实施例中,所述自滤光式多波长窄带探测器包括从上至下依次层叠的n组探测器,n组探测器用于探测n种不同波长的光,每组探测器包括从上至下依次层叠的第一电极、感光层和第二电极。
25.在本发明的一个实施例中,所述第一电极和所述第二电极均为透明电极。
26.在本发明的一个实施例中,所述数据采集装置包括多通道数据采集装置。
27.与现有技术相比,本发明的有益效果:
28.本发明为基于计算成像的多光谱相机。利用计算成像算法,可以利用无空间分辨能力的非阵列探测器实现空间分辨,避免制作使用阵列式探测器,因此可以使用多个非阵列窄带单波长探测器进行光谱分辨,且可以大大降低由于现有技术采用多个窄带单波长阵列式探测器带来的成本。同时,通过设计非阵列窄带单波长探测器,实现单个器件多波长探测,可以避免使用额外分光器件和滤光器件,解决了成像速度、体积、光谱数量问题;亦或将不同非阵列窄带单波长探测器并列使用,同样可以实现功能。
29.通过以下参考附图的详细说明,本发明的其它方面和特征变得明显。但是应当知道,该附图仅仅为解释的目的设计,而不是作为本发明的范围的限定,这是因为其应当参考附加的权利要求。还应当知道,除非另外指出,不必要依比例绘制附图,它们仅仅力图概念地说明此处描述的结构和流程。
附图说明
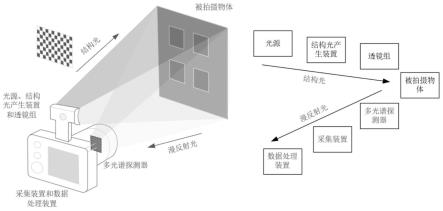
30.图1是本发明实施例提供的一种基于计算成像的主动式的多光谱相机的结构示意图;
31.图2是本发明实施例提供的一种基于计算成像的被动式的多光谱相机的结构示意图;
32.图3是本发明实施例提供的一种自滤光多光谱探测器的结构示意图;
33.图4是本发明实施例提供的一种硬件与软件处理过程示意图。
具体实施方式
34.下面结合具体实施例对本发明做进一步详细的描述,但本发明的实施方式不限于此。
35.实施例一
36.本发明实施例提供一种基于计算成像的多光谱相机,该多光谱相机包括:依次设置的光源、结构光产生装置、透镜组、多光谱探测器、数据采集装置和数据处理装置,或者依次设置的透镜组、结构光产生装置、多光谱探测器、数据采集装置和数据处理装置。
37.在一个具体实施例中,请参见图1,本实施例提供一种基于计算成像的主动式的多光谱相机,当多光谱相机为主动式时:
38.光源,用于发出均匀光;
39.结构光产生装置,用于将均匀光转换成结构光;
40.透镜组,用于将结构光聚焦至被拍摄物体上;
41.多光谱探测器,用于将被拍摄物体反射的光转换成光电信号;
42.数据采集装置,用于采集多光谱探测器转换的光电信号;
43.数据处理装置,用于将数据采集装置采集到的光电信号还原成二维或三维图像。
44.具体地,主动式的多光谱相机为利用相机上光源照明成像物体(即被拍摄物体)。光源发出的均匀光经过结构光产生装置变成结构光,在经过透镜组投影到成像物体上,利用多光谱探测器和数据采集装置获得图像信号,在数据处理装置中利用计算成像算法获得物体空间信息,实现照相功能。
45.在一个具体实施例中,请参见图2,本实施例提供一种基于计算成像的被动式的多光谱相机,当多光谱相机为被动式时,自然光照射至被拍摄物体上,得到漫反射光:
46.透镜组,用于将漫反射光聚焦至结构光产生装置上;
47.结构光产生装置,用于将漫反射光转换成结构光;
48.多光谱探测器,用于将结构光转换成光电信号;
49.数据采集装置,用于采集多光谱探测器转换的光电信号;
50.数据处理装置,用于将数据采集装置采集到的光电信号还原成二维或三维图像。
51.具体地,被动式的多光谱相机为利用太阳光等自然光照明成像物体,得到的漫反射光经过透镜组(即镜头)聚焦,经过结构光产生装置变成结构光,再,利用多光谱探测器和数据采集装置获得图像信号,在数据处理装置中利用计算成像算法获得物体空间信息,实现照相功能。
52.在本实施例中,光源可发出均匀光,类似于传统照相机闪光灯。
53.在本实施例中,对于主动式,结构光产生装置的功能是将均匀光转换成结构光,对于被动式,结构光产生装置的功能是将漫反射光转换成结构光,结构光产生装置可以是空间光调制器,可以是数字微镜阵列,也可以是可电控的光源阵列,如led阵列。
54.优选地,结构光可以是一组哈达玛基底光,也可以是傅里叶基底光,也可以是随机光斑,也可以是其他基底的光斑。
55.在本实施例中,透镜组为匹配波长的聚焦光的装置(即镜头),在主动式的多光谱相机中,透镜组可以是投影仪的投影镜头,也可以是望远系统的镜头,还可以是单个凸透镜,在被动式的光谱相机中,透镜组可以是传统的相机镜头,也可以是单个凸透镜。
56.在本实施例中,多光谱探测器的功能是将各个波长的光分别转换成对应的光电信号。
57.优选地,多光谱探测器为自滤光式多波长窄带探测器。
58.进一步地,多光谱探测器包括从上至下依次层叠的n组探测器,n组探测器用于探测n种不同波长的光,每组探测器包括从上至下依次层叠的第一电极、感光层和第二电极。请参见图3,第一组探测器包括电极1、感光层1和电极2,第二组探测器包括电极3、感光层2和电极4,依此类推,第n组探测器包括电极2n-1、感光层n和电极2n。光从上方照射下来,最短波部分被感光层1吸收,转换成光电信号,长波部分透过;次短波部分被感光层2吸收,转换成光电信号,长波部分透过,依此类推。所述电极1-电极2n均为透明电极,连接电极1和电极2即为探测器1,连接电极3和电极4即为探测器2,依此类推。因此,探测器1-探测器n分别探测不同波长。另外,此时可能出现短波部分吸收不完全现象,如探测器2仍然有少量最短波光到底,此时需要在计算成像算法前做加权叠加算法,保证探测器1-探测器n分别探测不同波长。感光层1-感光层n可以为不同材料,也可以是同一系列材料配比不同,若为不同材料,例如可以选用mapbcl3、mapbbr3、mapbi3,若为同一系列材料,例如可以选用mapbbr
x
cl
3-x
(溴铯铅甲基),感光层1-感光层n分别可以选用mapbbr3,
…
mapbbr
x
cl
3-x
,
…
mapbcl3,即感光层1-感光层n的x逐渐减小。自滤光式多波长窄带探测器探测到的不同波长光来自于同一光路,在同时被采集的前提下可以保证照相机输出的多光谱图像的时空一致性。
59.另外,多光谱探测器次优选为多波长窄带探测器阵列,即n个窄带探测器阵列紧密叠放在一起,,即n个层叠设置的窄带探测器组成的阵列,其可以保证时间一致。
60.在本实施例中,数据采集装置为多通道数据采集装置,采集多光谱探测器收集的光电信号,通道数匹配多光谱探测器的光谱数量。
61.在本实施例中,数据处理装置功能是利用计算成像算法将采集到的光电信号还原成二维或三维图像,可以是计算机,也可以是其他可编程电路。计算成像算法为匹配结构光的对应算法,如结构光为傅里叶基底光,对应算法为逆傅里叶算法,对于其它不同类型结构光可对应选择相应的算法,在此不再赘述。
62.本发明为基于计算成像的多光谱相机。利用计算成像算法,可以利用无空间分辨能力的非阵列探测器实现空间分辨,避免制作使用阵列式探测器,因此可以使用多个非阵列窄带单波长探测器进行光谱分辨,且可以大大降低由于现有技术采用多个窄带单波长阵列式探测器带来的成本。同时,通过设计非阵列窄带单波长探测器,实现单个器件多波长探测,可以避免使用额外分光器件和滤光器件,解决了成像速度、体积、光谱数量问题;亦或将不同非阵列窄带单波长探测器并列使用,同样可以实现功能。
63.实施例二
64.本发明实施例以主动式照相模式,傅里叶基底光为例具体说明该发明。硬件与软件处理过程如附图4所示。
65.首先,白光光源发出均匀分布的出射光,经扩束透镜组照射到空间调制器上,产生结构光。空间光调制器是指在主动控制下,它可以通过液晶分子调制光场的某个参量,例如通过调制光场的振幅,通过折射率调制相位,通过偏振面的旋转调制偏振态,或是实现非相干-相干光的转换,从而将一定的信息写入光波中,达到光波调制的目的。型号为v-6501vis的空间光调制器,其由1920
×
1080个7.56μm大小的数字微镜构成,可以实现400-2200nm范围内光的调制。多光谱探测器相当于摄像头,可以将光信号转换为电信号进行处理,随后,光电探测器探测到的光电信号被数据源表(数据采集装置)和计算机采集。数据源表采集精度较高,非常适合光电信号特征分析,然而数据源表采集速度较慢,只有50hz,可根据实际需要购置多通道高速采集卡以满足成像对成像速度的要求。可以尝试使用多(m)组探测器,利用多通道平均的方法降低噪声,因此对多通道高速采集卡的要求是大于等于mn。
66.得到所需光电信号后,拟采用逆傅里叶变换方法进行光声图像重建单独的各个光谱图像,然后利用图像融合算法合成高质量多光谱图像(数据立方)。该成像系统软件用labview程序进行编写。软件运行后首先对成像参数进行设置,包括光强、成像波长等,同时对图像矩阵进行初始化(归0),然后控制空间光调制器改变结构光的光强分布(即改变条纹),此时采集一组光电探测器的光电信号储存在数据寄存器中(i(m)),然后判断是否完成规定的采样次数,若为否,则回退至控制空间光调制器步骤,依次循环;如果是则关闭仪器。
67.随后数据寄存器的数据经过标准化(四步相移和平均)计算出傅里叶系数实部和虚部(α
re
和α
im
),然后经过空间逆傅里叶变换(ift),投影至图像矩阵的相应位置,形成单色图像,此时选择可以将图像显示在屏幕上,存储在图像寄存器里并显示出来,软件退出,完成拍照过程。
68.在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
69.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特征数据点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特征数据点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
70.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1