一种基于测距辅助的低开销纠缠光量子目标成像方法
1.本发明属于量子信息技术领域,是一种利用纠缠光获取目标的距离和图像信息的技术,可以在对目标进行成像的同时获取目标的距离信息,且可以有效降低量子目标成像的时间开销。
背景技术:
2.当前,以量子信息科学为代表的量子科技正在不断形成新的科学前沿,包括量子通信、量子计算和量子精密测量三方面。这些革命性技术将会对传统技术产生颠覆性影响。
3.量子精密测量领域的量子成像因其具有高分辨力、强抗干扰能力、高保密性等优点成为热门研究方向。传统的几何光学成像是基于物像间点对点的空间对应关系进行成像的,而量子成像则不同,其将光路分成信号光路和参考光路,信号光路仅有一个不具备成像功能的桶探测器,参考光路仅有一个面探测器,不包含任何目标物体信息,而只有将两路信号做关联才可实现目标成像。量子成像利用纠缠光量子的空间关联特性实现成像过程的空间分离,完成非局域性成像,同时根据纠缠光量子的不可克隆原理可保证成像光路的安全性。此外,量子成像对光场的相位变化不敏感,故不易受大气湍流扰动的影响,具有抗环境干扰的能力。
4.量子成像凭借自身特点可以避开云、雾、烟等常规成像方法无法成像的天气条件的干扰,从而获得更加清晰的图像。这样的优势使得量子成像在消湍流成像、量子雷达、量子断层扫描等方面具有较好的应用前景。但目前量子成像还存在成像效率不高的问题,获得高分辨率的量子成像结果往往需要较大的时间开销,于是极大地限制了量子成像的实用化。
技术实现要素:
5.本发明的目的是提供一种低开销的纠缠光量子目标成像方法。本发明首先选取局部测距像素区域,利用纠缠光量子的时间关联特性,通过局部符合计数得到目标的距离信息;然后,基于该距离信息对应的时间差修正桶探测器得到的时间脉冲序列;其次,利用数字微镜器件(digital micromirror device,dmd)从第一个像素开始完成全局符合计数以得到关于目标的符合计数值;最后,根据线性映射的方法,将符合计数值与灰度值进行映射,得到目标的量子灰度成像结果。
6.具体步骤如下:
7.步骤一:根据非线性晶体的自发参量下转换过程(spontaneous parametric down-conversion,spdc)利用周期极化磷酸氧钛钾(periodically poled ktiopo4, ppktp)晶体产生纠缠光子对;
8.步骤二:控制dmd选取尺寸为m
×
n的局部测距像素区域,进行以下局部测距操作;
9.步骤三:利用偏振分束器(polarization beam splitter,pbs)将纠缠光子对分为信号光子和参考光子,其中,透射过pbs的信号光子照射目标,然后利用通过波长为810nm的
窄带滤波片滤除杂光,最后被焦距为125mm的聚焦透镜收集到桶探测器以得到信号光子的到达时间脉冲序列s
t
;
10.步骤四:被pbs反射的参考光子经过反射银镜后入射至dmd,然后利用通过波长为810nm的窄带滤波片滤除杂光,最后被焦距为125mm聚焦透镜收集到面探测器以得到参考光子的到达时间脉冲序列r
t
;
11.步骤五:对s
t
和r
t
进行延时符合计数,得到信号光路和参考光路的时间差δt,同时也可得到目标距纠缠光源的距离信息,局部测距操作完成;
12.步骤六:通过控制dmd选取尺寸为m
×
n的全局成像像素区域,进行后续全局成像操作,令此时通过桶探测器和面探测器得到的时间脉冲序列分别为is
t
和ir
t
;
13.步骤七:利用步骤九的δt对桶探测器得到的时间脉冲序列进行修正,即有 is
′
t
=|is
t-δt|,然后利用is
′
t
和ir
t
完成符合计数,得到符合计数值c(x,y);
14.步骤八:根据线性映射方法,将c(x,y)与灰度值进行映射,得到目标的量子灰度成像结果,全局成像操作完成。
15.所述步骤一中包括以下步骤:
16.步骤一(一):利用激光器产生波长为405nm的泵浦光;
17.步骤一(二):利用焦距分别为100mm和50mm的透镜组成光束缩束组合,对泵浦光进行缩束,使其能量集中;
18.步骤一(三):利用透过波长为405nm的半波片(half wave plate,hwp)和四分之一波片(quarter wave plate,qwp)将泵浦光调制为线偏振光,以提高 ppktp晶体自发参量下转换过程的效率;
19.所述步骤四中包括以下步骤:
20.步骤五(一):以r
t
为参考序列将s
t
和r
t
的首个光子时间脉冲在时间上对齐,然后将s
t
和r
t
对应时间点的序列值相减以得到时间脉冲差值序列δsr
t
;
21.步骤五(二):设定时间范围[0,t]和符合门宽w ps,完成延时符合计数,绘制二阶关联曲线,定义该曲线峰值对应的时间a为信号光路和参考光路的时间差δt,并由此得到光源到目标的距离d=c
×
δt;
附图说明
[0022]
图1为本发明的量子成像光路结构示意图;
[0023]
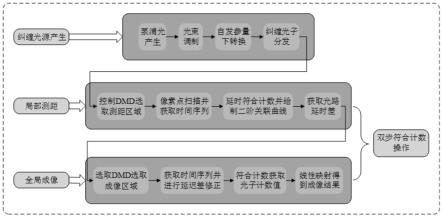
图2为本发明的技术路线图;
[0024]
图3为本发明的局部与全局像素区域选择示意图;
[0025]
图4为本发明的局部符合计数流程图。
具体实施方案
[0026]
下面结合附图对本发明作进一步详细描述:
[0027]
步骤一:利用激光器产生波长为405nm的泵浦光;
[0028]
步骤二:利用焦距分别为100mm和50mm的透镜组成光束缩束组合,对泵浦光进行缩束,使其能量集中;
[0029]
步骤三:利用透过波长为405nm的半波片和四分之一波片将泵浦光调制为线偏振
光,以提高ppktp晶体自发参量下转换过程的效率;
[0030]
步骤四:利用ppktp晶体自发参量下转换过程制备量子纠缠光,其中,根据非线性光学理论,下转换光强i满足:
[0031][0032]
其中,符号
“∝”
表示正比于,δk为相位失配量,l为晶体长度,c为光速。当周期性反转晶体的极化矢量方向时,在每个周期内光强叠加,晶体的非线性系数增大。此时,相位匹配条件为:
[0033][0034]
其中,k
p
、ki和ks分别为泵浦光、闲置光和信号光的波矢,λ为极化周期;
[0035]
步骤五:通过控制dmd选取尺寸为m
×
n的局部测距像素区域,并进行以下局部测距操作;
[0036]
步骤六:利用偏振分束器(polarization beam splitter,pbs)将纠缠光子对分为信号光子和参考光子,其中,透射过pbs的信号光子照射目标,然后利用通过波长为810nm的窄带滤波片滤除杂光,最后被焦距为125mm的聚焦透镜收集到桶探测器以得到信号光子的到达时间脉冲序列s
t
;
[0037]
步骤七:被pbs反射的参考光子经过反射银镜后入射至dmd,然后利用通过波长为810nm的窄带滤波片滤除杂光,最后被焦距为125mm聚焦透镜收集到面探测器以得到参考光子的到达时间脉冲序列r
t
;
[0038]
步骤八:时间脉冲序列的序列值所记录的信息是光子从光源到探测器的飞行时间,探测器会以固定的时间间隔获取光子信息,当信号光路和参考光路的光程差较大时,参考光路的面探测器会先探测到光子,而信号光路的桶探测器则延后探测到光子。需以r
t
为参考序列将s
t
和r
t
的首个光子时间脉冲在时间上对齐,然后将s
t
和r
t
对应时间点的序列值相减以得到时间脉冲差值序列δsr
t
;
[0039]
步骤九:设定时间范围[0,t]和符合门宽w ps,判断δsr
t
是否在[a-w/2,a+w/2](a=1,2,
…
,t)内,并统计差值个数,绘制二阶关联曲线,定义该曲线峰值对应的时间a为信号光路和参考光路的时间差δt,并由此得到光源到目标的距离d=c
×
δt,局部测距操作完成;
[0040]
步骤十:通过控制dmd选取尺寸为m
×
n的全局成像像素区域,进行后续全局成像操作,令此时通过桶探测器和面探测器得到的时间脉冲序列分别为is
t
和ir
t
;
[0041]
步骤十一:利用步骤九的δt对桶探测器得到的时间脉冲序列进行修正,即有is
′
t
=|is
t-δt|,然后利用is
′
t
和ir
t
完成符合计数,得到符合计数值c(x,y);
[0042]
步骤十二:选取c(x,y)中的最大值作为灰度值255、最小值作为灰度值0,将符合计数值与灰度值进行线性映射,得到目标的量子灰度成像结果,全局成像操作完成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1