一种曲面阵列式触觉传感器及其工作方法和机械手
1.本发明涉及传感器技术领域,特别涉及一种曲面阵列式触觉传感器及其工作方法和机械手。
背景技术:
2.随着机器人技术的快速发展,机器人被广泛应用在航空航天,智能制造、工业生产、医疗健康和家庭服务等领域。其中机械手作为机器人与环境交互的重要媒介,可以帮助机器人完成类人操作,比如航空航天接插件组装操作、日常物品搬运和手术过程中的精细操作等等。同时机械手也可以作为义肢帮助残疾人处理一些基本的日常操作。
3.但由于现有机械手控制系统主要关注于如何完成抓握等常见模式应用,并没有太多考虑机械手的触觉特性,导致一些手部任务失败,比如无法拿稳一个水杯,用力过大导致脆弱物体被挤压变形等等。因此机械手触觉感知能力的引入将大大提高机械手的抓握操作能力以及扩展其使用范围。
4.现有触觉传感器主要基于压阻、压容和光学视觉的检测原理。压阻式触觉传感器制造简单,场景灵活,但具有材料滞后现象;压容式触觉传感器响应频率高,但是对电磁噪声敏感;基于光学视觉的触觉传感器利用计算机视觉技术获取接触特征,可以获得丰富的触觉信息,同时也带来了尺寸大,功耗高和计算成本高的问题。
技术实现要素:
5.本发明提供了一种曲面阵列式触觉传感器及其工作方法和机械手,以解决现有技术中的机械手抓握能力不足的问题。
6.为达到上述目的,本发明的技术方案是这样实现的:本发明提供了一种曲面阵列式触觉传感器,包括指尖底座层、中间电路层、表面皮肤层;所述指尖底座层安装在机械手的手指上,用于安装所述中间电路层和所述表面皮肤层;所述中间电路层包括集成电路板、单片机和多个压强感知芯片,所述集成电路板安装在所述指尖底座层上,所述单片机和多个所述压强感知芯片均安装在所述集成电路板上,多个所述压强感知芯片用于监测表面皮肤层各受力点的压强值,多个所述压强感知芯片分别与所述单片机独立电连接,所述单片机与外部上位机电连接;所述表面皮肤层包裹在所述中间电路层的表面,用于保护所述中间电路层, 并且作为中间媒介将外界作用力传递到压强感知芯片上。
7.优选地,所述指尖底座层包括底座主体和多个角柱,所述底座主体仿人手指尖部设计,多个所述角柱对称设置在所述底座主体上,所述集成电路板安装在多个所述角柱之间;所述底座主体上开设有指尖接插口,用于连接所述机械手的指尖部位。
8.优选地,所述表面皮肤层选用连续橡胶皮肤层,所述连续橡胶皮肤层包裹在所述
中间电路层的表面;所述表面皮肤层仿人手指尖部的表层设计。
9.优选地,所述集成电路板由多块电路板组成,多个所述压强感知芯片阵列分布在多块所述电路板上。
10.优选地,所述单片机选用stm32芯片,所述stm32芯片上设置有iic总线,所述压强感知芯片通过iic总线与所述stm32芯片独立电连接。
11.优选地,所述压强感知芯片选用mpl115a2气压芯片,所述mpl115a2气压芯片通过所述iic总线与所述stm32芯片独立电连接;所述mpl115a2气压芯片每次更新压强读数时,需由stm32芯片发起转换命令开始,在转换完成后,结果被存储到mpl115a2气压芯片中的压强和温度adc输出寄存器中。利用如下公式能计算当前环境的压强补偿值p
comp
:p
comp
=a0+(b1+c12
·
t
adc
)
·
p
adc
+b2
·
t
adc
其中p
adc
和t
adc
分别代表mpl115a2气压芯片中10位压强adc输出值和10位温度adc输出值,a0代表压力偏移系数,b1代表压力敏感系数,b2代表温度偏移系数,c12代表温度敏感系数,a0、b1、b2和c12均是mpl115a2气压芯片内部出厂自带的校正系数,在mpl115a2气压芯片中的值是不变的,但不同的芯片中的校正系数不同。
12.当输入压强为50kpa时,p
comp
将产生一个值为0;当输入压强为115kpa时,p
comp
将产生一个满量程值为1023。则实际压强值p为:p = p
comp
·
(115-50)/(1023-0) + 50。
13.本发明一方面还提供一种机械手,包括以上任一项所述的曲面阵列式触觉传感器、以及机械手主体部件,所述触觉传感器安装在所述机械手主体部件的指尖部位上。
14.本发明另一方面还提供一种曲面阵列式触觉传感器的工作方法,包括如下步骤:步骤s10、压强感知芯片实时采集数据;步骤s20、单片机将压强感知芯片实时采集的数据计算转换后传送到上位机;步骤s30、上位机实时接收数据;步骤s40、通过上位机对实时数据进行多态化显示;步骤s50、重复步骤s10至步骤s40,直至上位机关闭串口通信。
15.优选地,所述步骤s10具体包含如下步骤:步骤s11、判断设备是否已经初始化,不是则进入步骤s12,是则跳至步骤s14;步骤s12、设备通电并进行设备初始化;步骤s13、读取压强感知芯片内部自带的校正系数a0,b1,b2,c12;步骤s14、使用压强感知芯片中的压强和温度部分模数转换器进行实时数据转换,并实时输出p
adc
和t
adc
;步骤s15、根据每次获取的p
adc
和t
adc
数据,计算每次所采集的数据所对应的压强补偿值p
comp
以及实际压强值p。
16.其中步骤s12和s13仅在初始阶段执行一次,后面无需反复执行;优选地,所述步骤s40具体包含如下步骤:步骤s41、判断是否已经配置串口,不是则进入步骤s42,是则跳至步骤s44;步骤s42、配置串口;步骤s43、将前三秒数据的均值作为默认的初始值;步骤s44、将每次实际接收的数据与初始值作差得到相对压强值;
步骤s45、将相对压强值采用三维柱状图进行实时动态数据展示。
17.其中步骤s42和步骤s43仅在初始阶段执行一次,后面无需反复执行;本发明的有益效果:1、曲面阵列式触觉传感器采用一体化设计,使得触觉传感器结构简单,易于制造、方便维护更换和指尖集成;2、本发明上的底座主体和表面皮肤层均采用仿人手指尖部曲面设计,曲面形式可根据应用需求灵活改变,便于机械手对物体更好实施手内操作任务。同时由于弹性皮肤层的连续性,可以在压强感知芯片稀疏部署的同时达到更高的空间分辨精度;3、不同于压阻、压容式原理等的触觉传感器,本触觉传感器传感选用独立的压强感知芯片,各压强感知芯片均可直接与单片机通信,方便信息获取,同时也避免了不同压强感知芯片之间可能存在的信号串扰问题。
附图说明
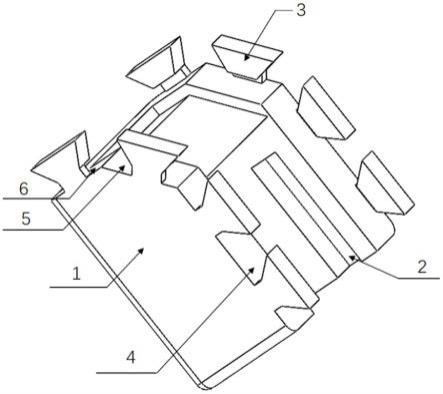
18.图1为底座主体的三维结构示意图;图2为集成电路板在底座主体上的安装示意图以及多个压强感知芯片在集成电路板上的布设示意图;图3为本发明的工作流程图;图4为步骤s10的详细工作流程图;图5为步骤s40的详细工作流程图;图6为角柱的正视图的放大图;图7为角柱的侧视图的放大图。
19.附图标记说明:1、底座主体;2、指尖接插口;3、角柱;4、第一平面;5、第二平面;6、第三平面;7、第一电路板;8、第二电路板;9、第三电路板。
具体实施方式
20.下面结合附图及具体实施例对本发明再作进一步详细的说明。在本发明的描述中,相关方位或位置关系为基于图1所示的方位或位置关系,其中,“上”、“下”是指图1的上下方向。需要理解的是,这些方位术语仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.另外,在本发明中的“第一”、“第二”等描述,仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量或顺序。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。
22.参照图1,本技术实施例提供了一种曲面阵列式触觉传感器,包括指尖底座层、中间电路层和表面皮肤层;所述指尖底座层安装在机械手的手指上,用于安装所述中间电路层、所述表面皮肤层;
所述上位机上装有matlab(美国mathworks公司出品的商业数学软件)软件;所述中间电路层包括集成电路板、单片机和多个压强感知芯片,所述集成电路板安装在所述指尖底座层上,所述集成电路板可以是刚性电路板或者柔性电路板,在本实施例中,集成电路板优选为刚性电路板,采用刚性电路板,便于多个压强感知芯片的安装;多个所述压强感知芯片用于监测表面皮肤层各受力点的压强值,多个所述压强感知芯片布设在所述集成电路板上;所述单片机设置在所述集成电路板上,所述集成电路板上焊接有四脚立贴插座,其为单片机上的uart(universal asynchronous receiver/transmitter,通用异步收发传输器)模块接线口,通过usb(universal serial bus,通用串行总线)转uart模块可以连接集成电路板上的四脚立贴插座和上位机,可实现触觉传感器和上位机上matlab软件的直接通讯;或,机械手有多个手指,每个手指上都有一个触觉传感器,每个触觉传感器上面都有一个集成电路板,每个集成电路板上面都有12个压强感知芯片;机械手的手掌上设置有手掌数据采集电路板,其上有很多四脚立贴插座,用于连接多个触觉传感器,如:对于三指机械手,就有三个触觉传感器,每个触觉传感器的中间层都有一个集成电路板,则总共有三个四脚立贴插座连接到手掌数据采集电路板,另有一个独立的单片机安装在手掌数据采集电路板上,用来收集各个触觉传感器发送来的压强数据,然后利用蓝牙模块统一发送到上位机上。
23.所述表面皮肤层包裹在所述中间电路层的表面,用于保护所述中间电路层, 并且作为中间媒介将外界作用力传递到压强感知芯片上。
24.所述指尖底座层包括底座主体1和多个角柱3,所述底座主体1仿人手指尖部设计,多个所述角柱3对称设置在所述底座主体1上,所述集成电路板安装在多个所述角柱3之间;角柱3的设计采用外凸的倒梯形设计,此设计的优势在于固定集成电路板的同时还能实现对所述表面皮肤层进行拉扯,使得所述表面皮肤层的连接强度增大,不容易脱落;同时其合理的位置布局,起到合理规划固定集成电路板的作用。
25.所述底座主体1上开设有指尖接插口2,用于连接所述机械手的指尖部位;所述底座主体1的正面由多个面构成,主要包括第一平面4、第二平面5和第三平面6,第一平面4、第二平面5和第三平面6以人的指肚作为原型,相互连接在一起,该设计能使得底座主体1以及触觉传感器更像人的指尖部位,曲面形式可依据具体灵巧手应用场景灵活改变,方便机械手对物体实施各种手内操作。
26.所述表面皮肤层选用连续橡胶皮肤层,所述连续橡胶皮肤层包裹在所述中间电路层的表面;所述表面皮肤层仿人手指尖部的表层设计。
27.所述集成电路板的数量设置有多块,集成电路板由三块电路板组成,分别为第一电路板7、第二电路板8和第三电路板9,第一电路板7、第二电路板8和第三电路板9仿制人指肚部位进行拼装焊接,形成一个近乎弧形的曲面形电路板,多个压强感知芯片阵列分布在所述集成电路板上,多个压强感知芯片的数量优选为12个,第一电路板7等距排布有6个压强感知芯片,另外6 个压强感知芯片,以3个为一组,均匀布设在第二电路板8和第三电路板9上。
28.所述单片机选用stm32芯片,所述stm32(arm cortex-m内核单片机)芯片上设置有
iic(inter-integrated circuit,集成电路总线)总线,所述压强感知芯片通过iic总线与所述stm32芯片独立电连接。
29.所述压强感知芯片选用mpl115a2(芯片名称)气压芯片,所述mpl115a2气压芯片通过所述iic总线与所述stm32芯片独立电连接;所述mpl115a2气压芯片每次更新压强读数时,需由stm32芯片发起转换命令开始,在转换完成后,结果被存储到mpl115a2气压芯片中的压强和温度adc(模拟数字转换器)输出寄存器中。利用如下公式能计算当前环境的压强补偿值p
comp
:p
comp
=a0+(b1+c12
·
t
adc
)
·
p
adc
+b2
·
t
adc
其中p
adc
和t
adc
分别代表mpl115a2气压芯片中10位压强adc输出值和10位温度adc输出值,a0代表压力偏移系数,b1代表压力敏感系数,b2代表温度偏移系数,c12代表温度敏感系数,a0、b1、b2和c12均是mpl115a2气压芯片内部出厂自带的校正系数,在芯片中的值是不变的,但不同的芯片中的校正系数不同。
30.当输入压强为50kpa时,p
comp
将产生一个值为0;当输入压强为115kpa时,p
comp
将产生一个满量程值为1023。则实际压强值p为p = p
comp
·
(115-50)/(1023-0) + 50举例:若某个mpl115a2气压芯片内部校正参数值为a0 = 2009.75, b1 =
ꢀ‑
2.37585, b2 =
ꢀ‑
0.92047, c12 = 0.000790。当某时刻压力adc输出值为p
adc
= 410 adc counts, 温度adc输出值为t
adc = 507 adc counts,则压强补偿值大小为:p
comp
=a0+(b1+c12
·
t
adc
)
·
p
adc
+b2
·
t
adc = 733.19051:则实际压强值为:p= p
comp
·
(115-50)/(1023-0) + 50=96.59kpa。即当前时刻测量的压强值为96.59kpa。
31.stm32芯片通过scl(时钟线)和sda(数据线)两根线便可寻址不同的压强感知芯片的目标地址,并读取其中的p
adc
和t
adc
, 再由stm32芯片计算得到压力补偿值p
comp
和实际压强值p,从而完成触觉传感器实时压强信息的测量以及方便后期的信息处理。触觉传感器采用串口通讯, 单片机利用异步串口通信方式将压强数据以固定速率传递至上位机,便于后期数据处理。
32.具体而言,针对数据获取部分,主控单片机芯片stm32芯片采用iic通信进行触觉传感器寻址及数据获取。针对数据发送部分,主控单片机芯片stm32芯片采用串口通讯(tx,rx,3.3v,gnd)通过usb口向上位机上的matlab软件发送已收集的各压强感知芯片的信息。
33.针对数据的显示方式,上位机matlab软件接收数据之后,分为如下几部分进行处理:在前三秒时刻,将触觉传感器处于无接触状态,上位机不断接收触觉传感器数据后进行存储累积。时间达到后,将前三秒时间段中触觉传感器数据均值作为默认初始状态,即无外力作用时的参考零点,以消除环境引起的初始误差。
34.第三秒以后,上位机将实时接收到的数据与前面初始状态之间作差后得到相对压强值作为当前实时状态,该相对压强值代表触觉传感器的当前接触状态。接收到的触觉传感器压强数据以向量形式储存,利用matlab软件将其转换成矩阵形式后进行多类型数据显示。显示状态分为三维柱状图显示和多曲线实时显示状态。
35.触觉传感器的标定方式如下:
触觉传感器在实际使用前需要经过标定。借助标定设备和上位机完成触觉传感器标定数据采集和数据拟合。
36.标定设备能够进行空间三维运动,其上固定的推拉力计作为参考力信息,推拉力计与上位机之间可以完成通讯。
37.标定过程采用压力试验机对传感器表面不同位置施加不同大小的按压力。收集此过程中的推拉力计输出、触觉传感器数据输出和给定按压力的位置信息。将作用力及其施加位置作为参考数据,触觉传感器的12个数据通道输出作为原始数据。建立触觉传感器数学模型,经上位机数据处理后采用数据拟合方式总结触觉传感器原始数据与参考数据间的数学函数映射关系,完成触觉传感器标定。
38.本发明一方面还提供一种机械手,包括以上任一项所述的曲面阵列式触觉传感器、以及机械手主体部件,所述触觉传感器安装在所述机械手主体部件的指尖部位上。
39.本发明另一方面还提供一种曲面阵列式触觉传感器的工作方法,包括如下步骤:步骤s10、压强感知芯片实时采集数据;步骤s20、单片机将压强感知芯片实时采集的数据计算转换后传送到上位机;步骤s30、上位机实时接收数据;步骤s40、通过上位机对实时数据进行多态化显示;步骤s50、重复步骤s10至步骤s40,直至上位机关闭串口通信。
40.优选地,所述步骤s10具体包含如下步骤:步骤s11、判断设备是否已经初始化,不是则进入步骤s12,是则跳至步骤s14;步骤s12、设备通电并进行设备初始化;步骤s13、读取压强感知芯片内部自带的校正系数a0、b1、b2、c12;步骤s14、使用压强感知芯片中的压强和温度部分模数转换器进行实时数据转换,并实时输出p
adc
和t
adc
;步骤s15、实时采集p
adc
和t
adc
数据,并根据每次获取的p
adc
和t
adc
数据,计算每次所采集的数据所对应的压强补偿值p
comp
以及实际压强值p。
41.其中步骤s12和s13仅在初始阶段执行一次,后面无需反复执行;优选地,所述步骤s40具体包含如下步骤:步骤s41、判断是否已经配置串口,不是则进入步骤s42,是则跳至步骤s44;步骤s42、配置串口;步骤s43、将前三秒数据的均值作为默认的初始值;步骤s44、将每次实际接收的数据与初始值作差得到相对压强值;步骤s45、将相对压强值采用三维柱状图进行实时动态数据展示。
42.其中步骤s42和步骤s43仅在初始阶段执行一次,后面无需反复执行;以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不同限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。并且,本发明各个实施方式之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1