一种无人驾驶探测跑道微小异物的装置的制作方法
1.本发明涉及一种机场跑道异物探测装置,具体涉及一种无人驾驶探测跑道微小异物的装置。
背景技术:
2.机场跑道是飞机降落和起飞的必要区域,如果机场跑道清理不干净极易发生飞机安全事故,造成人员伤亡,因此机场跑道的重要性不言而喻,但是机场跑道上时常有不明异物出现,探测并及时清理是工作人员的工作内容,但是仅依靠人员的眼睛直观探测范围有限,粒径小的异物容易忽视。
3.因此,如何提供一种无人驾驶探测跑道微小异物的装置是本领域技术人员亟需解决的问题。
技术实现要素:
4.有鉴于此,本发明提供了一种无人驾驶探测跑道微小异物的装置,可以在机场跑道内行走探测异物。
5.为了达到上述目的,本发明采用如下技术方案:一种无人驾驶探测跑道微小异物的装置,其包括:
6.车体,所述车体包括底盘、从动轮、驱动轮、转向电机、转向轴及转向连杆,所述驱动轮及从动轮均两两成组转动安装在所述底盘上,所述驱动轮为轮毂电机驱动轮,所述转向连杆与成组的所述驱动轮连接控制驱动轮的转向,所述转向轴与所述转向连杆传动连接,所述转向电机固定在所述底盘上,所述转向电机与所述转向轴传动连接;
7.过渡轴,所述过渡轴竖直转动连接在所述底盘的中部,所述过渡轴的侧壁上环设有齿牙带;
8.伺服电机,所述伺服电机固定连接在所述底盘上,所述伺服电机的输出轴竖直布置,所述伺服电机的输出轴上传动连接有齿轮,所述齿轮与所述齿牙带啮合;
9.安装座,所述安装座固定在所述过渡轴的顶部,所述安装座上可拆卸连接有摄像机;
10.sar雷达,所述sar雷达两两成组且分别固定连接在所述底板的顶部两侧;
11.服务器,所述服务器固定在所述底盘上,所述服务器设有信号接收处理模块、无人驾驶模块、定位模块和雷达数据分析模块,所述信号接收处理模块用于接收处理外部操控信号,所述无人驾驶模块与信号接收处理模块信号线连接,所述无人驾驶模块控制伺服电机、转向电机和轮毂电机的运转,所述定位模块与外部显示器连接显示车体定位信息,所述雷达数据分析模块与sar雷达信号连接。
12.本发明的有益效果是:设置了驱动轮和从动轮,驱动轮为轮毂电机驱动轮,动力足,行动转向灵活,转向连杆与转向轴连接,转向轴通过转向电机控制,在转向电机的驱动下转向连杆控制驱动轮的转向,完成车辆转弯换向,安装座相对转动连接在底盘上,安装座
上可拆卸连接摄像机,安装座可以调节转动角度,改变摄像机探测角度,底盘两侧的sar雷达用于探测异物,摄像机和sar雷达配合,可以探测异物获得清晰的图片,服务器是整体装置的控制组件,服务器上安装的定位模块也方便车辆的定位,获得异物的具体位置信息,便于工作人员快速清理,本装置可以遥控驾驶,在机场跑到内巡检,使用方便,也可以使用无人驾驶模块自动驾驶,自动化程度高。
13.优选的,所述安装座上固定连接有射灯。
14.优选的,所述安装座上开设有盛放槽,所述盛放槽内上下滑动连接有座板,所述摄像机固定连接在所述座板上。
15.优选的,所述服务器上安装有雷达数据分析算法系统、摄像机追踪算法系统、拍摄视频和照片的数据存储系统及车辆启动和停车调度系统。
16.优选的,所述摄像机与外部显示器信号连接,所述外部显示器同步显示拍摄镜头。
附图说明
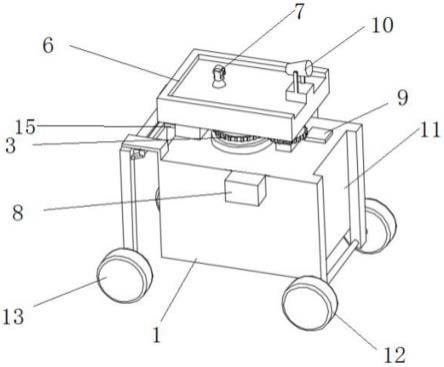
17.图1为本发明一种无人驾驶探测跑道微小异物的装置结构示意图一;
18.图2为本发明一种无人驾驶探测跑道微小异物的装置结构示意图二。
19.1车体、11底盘、12从动轮、13驱动轮、14转向电机、15转向轴、16转向连杆、2过渡轴、3齿牙带、4伺服电机、5齿轮、6安装座、7摄像机、8sar雷达、9服务器、10射灯。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.参阅本发明附图1至2,根据本发明实施例一种无人驾驶探测跑道微小异物的装置,其包括:
22.车体1,车体1包括底盘11、从动轮12、驱动轮13、转向电机14、转向轴15及转向连杆16,驱动轮13及从动轮12均两两成组转动安装在底盘11上,驱动轮13为轮毂电机驱动轮,转向连杆16与成组的驱动轮13连接控制驱动轮13的转向,转向轴15与转向连杆16传动连接,转向电机14固定在底盘11上,转向电机14与转向轴15传动连接;转向电机代替了人工转动方向盘,通过信号控制转动电机完成车辆的转向控制。实现无人驾驶。
23.过渡轴2,过渡轴2竖直转动连接在底盘11的中部,过渡轴2的侧壁上环设有齿牙带3;
24.伺服电机4,伺服电机4固定连接在底盘11上,伺服电机4的输出轴竖直布置,伺服电机4的输出轴上传动连接有齿轮5,齿轮5与齿牙带3啮合;伺服电机可以正反转。
25.安装座6,安装座6固定在过渡轴2的顶部,安装座6上可拆卸连接有摄像机7;
26.sar雷达8,sar雷达8两两成组固定连接在底座的顶部两侧,雷达的尺寸可以根据实际需要调整。
27.服务器9,服务器9固定在底盘11上,服务器9设有信号接收处理模块、无人驾驶模块、定位模块和雷达数据分析模块,信号接收处理模块用于接收处理外部操控信号,无人驾
驶模块与信号接收处理模块信号线连接,无人驾驶模块控制伺服电机、转向电机和轮毂电机的运转,定位模块与外部显示器连接显示车体定位信息,雷达数据分析模块与sar雷达信号连接,用于分析处理sar雷达探测的数据信息。
28.整个车体的运动可以在外部信号操控下完成。车体上也设置有无人驾驶模块,完成智能的无人驾驶巡检。
29.底盘有一定的高度,便于sar雷达的安装,有利于sar雷达的探测,防止障碍物影响探测波。
30.在另一些实施例中,安装座6上固定连接有射灯10,射灯10夜间辅助照射,本发明在夜间也能巡检,便于摄像机上传清晰图像。
31.在另一些具体实施例中,安装座6上开设有盛放槽,盛放槽内上下滑动连接有座板,摄像机连接在座板上。采用分体式安装,在安装座上也可以安装别的探测装置,通用性强。安装座也可以暂时用来收集异物。使用方便。
32.在其他一些实施例中,服务器9上安装有雷达数据分析算法系统、摄像机追踪算法系统、拍摄视频和照片的数据存储系统及车辆启动和停车调度系统。实现智能控制。
33.在其他一些具体实施例中,摄像机7与外部显示器信号连接,外部显示器同步显示拍摄镜头,便于及时发现异物。
34.作业流程:
35.1、无人驾驶车辆按机场允许的速度沿固定的直线匀速行驶;
36.2、sar雷达边移动边探测,探测数据传输到车载算法服务器计算出跑道上可能的微小异物,并计算出微小异物的坐标;
37.3、车辆调度系统在收到雷达探测异物告警后减速停车;
38.4、摄像机追踪系统在收到坐标数据后立即启动追踪,并拍摄追踪视频或照片;
39.5、拍摄的招聘通过机场内部网络发送到值班室监控大屏。
40.本发明中的摄像机追踪直线距离50米-2000米,能拍摄到2cm以上微小物体的清晰照片,环境光线补足情况下有红外激光补光。
41.sar雷达为30*20*20的长方体,前端两个雷达波发射和接收窗口,雷达探测直线距离范围50米-2000米,能探测到2cm以上的微小物体。
42.定位系统选用北斗定位系统,能精确定位车辆位置。
43.本发明中驱动轮的转向采用现有的汽车转向原理,此处不在赘述。
44.对于实施例公开的装置和使用方法而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
45.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1