一种背光源的光线强度检测设备的制作方法
1.本发明涉及光学设备的测试技术领域,尤其涉及一种背光源的光线强度检测设备。
背景技术:
2.背光板制作出来后,为了保证背光板的背光源光线强度合格,一般都需要对背光板进行光学检测,使得光线强度合格。
3.专利申请cn210269114u,公布了一种背光源的光学检测设备,涉及光学检测技术领域,包括镜筒,所述镜筒的下端设置有外框,所述外框的内侧一端设置有滑动槽,所述外框的一侧设置有ccd相机,且外框的另一侧安装有二次电子探头,所述载物台的底端安装有次台螺旋。射线矫正线圈可以调整入射光线,调整光在背光源板上的入射角,背散射电子探头和二次电子探头可以从水平方向向背光源板发射不同夹角的入射光线,最后将不同角度发射后的光线射入ccd相机中,通过在相机中外接显示屏上光线清晰度可以观测背光板的对光通透率,从而达到对背光源的光学性能达到检测效果,次台螺旋可以调节载物台在外框上的位置的移动可以控制背光板与光线的折射夹角。虽然上述专利能够实现对背光板的光线强度进行光学检测,但是光学检测时背光板未被固定防止发生偏移,从而会影响光学检测结果的准确性。
4.基于上述专利中存在的缺陷,需要设计一种能够对背光板进行夹紧定位,不易影响光学检测结果的准确性的背光源的光线强度检测设备。
技术实现要素:
5.为了克服上述专利光学检测时背光板未被固定防止发生偏移,从而会影响光学检测结果的准确性的缺点,本发明提供一种能够对背光板进行夹紧定位,不易影响光学检测结果的准确性的背光源的光线强度检测设备。
6.本发明的技术方案是:
7.一种背光源的光线强度检测设备,包括有检测底箱、支撑底架、固定斜板和光学传感器,检测底箱底部前后对称固接有支撑底架,检测底箱外左右两侧面下部都前后对称固接有固定斜板,光学传感器用于对背光板的光线强度进行光学检测,其特征在于,还包括有驱动机构和安装机构,检测底箱与固定斜板之间设置有用于提供动力的驱动机构,检测底箱上设置有用于固定安装的安装机构,安装机构与四个光学传感器固定连接。
8.进一步说明,驱动机构包括有运料皮带组件、传动横轴、换向横轴、换向锥齿轮和伺服电机,检测底箱下部中间固接有伺服电机,左方前后两侧固定斜板左部之间转动式连接有传动横轴,右方固定斜板右部之间也转动式连接有传动横轴,左右两侧传动横轴之间前后对称连接有运料皮带组件,运料皮带组件由两个皮带轮和皮带组成,两个传动横轴之间通过皮带传动,检测底箱下部中右侧转动式连接有换向横轴,换向横轴前部与伺服电机的输出轴都固接有换向锥齿轮,两个换向锥齿轮相互啮合,换向横轴与传动横轴之间通过
皮带传动。
9.进一步说明,安装机构包括有定位立板、限位导柱、限位弹簧和定位立架,检测底箱前后两侧上部都左右对称固接有限位导柱,四根限位导柱上都滑动式连接有定位立板,四根限位导柱顶端分别与四个定位立板内部之间连接有限位弹簧,四个定位立板顶部都固接有定位立架,四个定位立架分别与四个光学传感器固定连接,四个定位立架均与检测底箱滑动连接。
10.进一步说明,还包括有用于对背光板夹紧定位的夹紧机构,夹紧机构包括有旋转圆座、铰接连杆、定位齿条、从动齿轮、开槽短轴、内螺纹短板、夹紧底块、第一缓冲弹簧和助动滚轮,检测底箱前后两侧左下部都转动式连接有旋转圆座,前后两侧的旋转圆座与左方传动横轴之间均通过皮带传动,前后两侧旋转圆座外部都转动式连接有铰接连杆,检测底箱前后两侧中下部都滑动式连接有定位齿条,前后两侧定位齿条分别与前后两侧铰接连杆转动连接,检测底箱前后两侧中部都转动式连接有开槽短轴,前后两侧开槽短轴外部都通过键连接的方式固定连接有从动齿轮,前后两侧从动齿轮分别与前后两侧定位齿条啮合,检测底箱前后两侧中上部都滑动式连接有用于对背光板夹紧定位的夹紧底块,前后两侧夹紧底块下部中间都滑动式连接有内螺纹短板,前后两侧内螺纹短板分别与前后两侧开槽短轴螺纹式连接,前后两侧夹紧底块内部分别与前后两侧内螺纹短板上部之间左右对称连接有第一缓冲弹簧,前后两侧夹紧底块中部都间隔转动式连接有助动滚轮。
11.进一步说明,还包括有用于对背光板进一步定位的限位机构,限位机构包括有连接横杆、定位套筒、定位弹簧、限位横杆、固定横杆、限位底座、限位底块和第二缓冲弹簧,检测底箱前后两侧右中部都滑动式连接有限位横杆,前后两侧限位横杆外部都固接有定位套筒,前后两侧定位套筒内都滑动式连接有连接横杆,前后两侧连接横杆分别与前后两侧定位齿条固定连接,前后两侧连接横杆右部分别与前后两侧定位套筒内部之间连接有定位弹簧,检测底箱前后两侧右下部都转动式连接有固定横杆,前后两侧固定横杆内侧固接有限位底座,前后两侧限位底座内都滑动式连接有用于对背光板进一步定位的限位底块,前后两侧限位底座内部分别与前后两侧限位底块底部之间固接有两根第二缓冲弹簧。
12.进一步说明,还包括有用于增加检测效率的检测定位机构,检测定位机构包括有定位横杆、限位连架、定位横板、第一复位弹簧、带柱圆盘和开槽横板,前方左右两侧定位立板前侧面上部之间固接有定位横杆,后方左右两侧定位立板后侧面上部之间也固接有定位横杆,检测底箱前后两侧右下部都滑动式连接有限位连架,前后两侧限位连架分别与右方前后两侧定位立板固定连接,检测底箱前后两侧右下部都前后对称固接有两个定位横板,前方两个定位横板与前方限位连架固定连接,后方两个定位横板与后方限位连架固定连接,四个定位横板底部与检测底箱内部都固接有两根第一复位弹簧,前后两侧固定横杆内端都固接有带柱圆盘,前后两侧限位连架内侧都固接有开槽横板,前后两侧开槽横板分别套于前后两侧带柱圆盘上,前后两侧开槽横板分别与前后两侧带柱圆盘滑动连接。
13.进一步说明,还包括有用于对背光板清理的清洁机构,清洁机构包括有海绵滚轮、连接短杆和第二复位弹簧,检测底箱左部上侧前后对称固接有连接短杆,前后两侧连接短杆左部之间转动式连接有用于对背光板清理的海绵滚轮,前后两侧连接短杆底部与检测底箱左侧面上部之间都固接有第二复位弹簧。
14.进一步说明,还包括有缓震垫,前后两侧支撑底架底部都左右对称固接有缓震垫。
15.本发明的有益效果为:
16.1、本发明伺服电机工作时,左方传动横轴正转分别通过皮带传动带动前后两侧旋转圆座正转,从而前后两侧夹紧底块向内移动对背光板进行夹紧定位,避免背光板前后产生偏移,如此,能够对背光板进行夹紧定位,不易影响光学检测结果的准确性。
17.2、本发明限位机构的作用下,背光板向右移动与前后两侧限位底块接触,前后两侧限位底块对背光板挡住,避免背光板向右移动过快,如此,可进一步对背光板进行定位。
18.3、本发明清洁机构作用下,背光板向右移动被海绵滚轮清理,如此,可避免背光板上残留灰尘或杂质影响光学检测结果。
附图说明
19.图1为本发明的第一视角立体结构示意图。
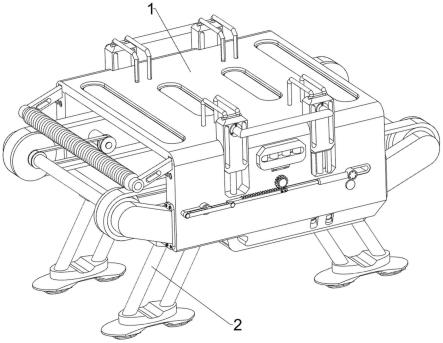
20.图2为本发明的第二视角立体结构示意图。
21.图3为本发明的第一种部分剖视结构示意图。
22.图4为本发明的驱动机构的部分剖视结构示意图。
23.图5为本发明的安装机构的部分剖视结构示意图。
24.图6为本发明的第二种部分剖视结构示意图。
25.图7为本发明的夹紧机构的第一种部分剖视结构示意图。
26.图8为本发明a部分的放大示意图。
27.图9为本发明的夹紧机构的第二种部分剖视结构示意图。
28.图10为本发明的夹紧机构的第三种部分剖视结构示意图。
29.图11为本发明的限位机构的第一种部分剖视结构示意图。
30.图12为本发明b部分的放大示意图。
31.图13为本发明的限位机构的第二种部分剖视结构示意图。
32.图14为本发明的第三种部分剖视结构示意图。
33.图15为本发明的检测定位机构的第一种部分剖视结构示意图。
34.图16为本发明的检测定位机构的第二种部分剖视结构示意图。
35.图17为本发明的检测定位机构的第三种部分剖视结构示意图。
36.图18为本发明的清洁机构的部分剖视结构示意图。
37.附图中的标记:1:检测底箱,2:支撑底架,21:缓震垫,3:固定斜板,4:光学传感器,5:驱动机构,52:传动横轴,54:换向横轴,55:换向锥齿轮,56:伺服电机,6:安装机构,61:定位立板,62:限位导柱,63:限位弹簧,64:定位立架,7:夹紧机构,72:旋转圆座,73:铰接连杆,74:定位齿条,75:从动齿轮,76:开槽短轴,77:内螺纹短板,78:夹紧底块,79:第一缓冲弹簧,710:助动滚轮,8:限位机构,81:连接横杆,82:定位套筒,83:定位弹簧,84:限位横杆,85:固定横杆,86:限位底座,87:限位底块,88:第二缓冲弹簧,9:检测定位机构,91:定位横杆,92:限位连架,93:定位横板,94:第一复位弹簧,95:带柱圆盘,96:开槽横板,10:清洁机构,101:海绵滚轮,102:连接短杆,103:第二复位弹簧。
具体实施方式
38.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明
用来解释本发明,但并不作为对本发明的限定。
39.实施例1
40.一种背光源的光线强度检测设备,如图1-图5所示,包括有检测底箱1、支撑底架2、固定斜板3、光学传感器4、驱动机构5和安装机构6,检测底箱1底部前后对称固接有支撑底架2,检测底箱1外左右两侧面下部都前后对称固接有固定斜板3,检测底箱1与固定斜板3之间设置有驱动机构5,驱动机构5可实现带动背光板移动,检测底箱1上设置有安装机构6,安装机构6上连接有四个光学传感器4,安装机构6可实现对光学传感器4进行固定安装。
41.如图2所示,还包括有缓震垫21,前后两侧支撑底架2底部都左右对称固接有缓震垫21。
42.如图2-图4所示,驱动机构5包括有运料皮带组件51、传动横轴52、换向横轴54、换向锥齿轮55和伺服电机56,检测底箱1下部中间固接有伺服电机56,左方前后两侧固定斜板3左部之间转动式连接有传动横轴52,右方固定斜板3右部之间也转动式连接有传动横轴52,左右两侧传动横轴52之间前后对称连接有运料皮带组件51,运料皮带组件51由两个皮带轮和皮带组成,两个传动横轴52之间通过皮带传动,检测底箱1下部中右侧转动式连接有换向横轴54,换向横轴54前部与伺服电机56的输出轴都固接有换向锥齿轮55,两个换向锥齿轮55相互啮合,换向横轴54与传动横轴52之间通过皮带传动。
43.如图3和图5所示,安装机构6包括有定位立板61、限位导柱62、限位弹簧63和定位立架64,检测底箱1前后两侧上部都左右对称固接有限位导柱62,四根限位导柱62上都滑动式连接有定位立板61,四根限位导柱62顶端分别与四个定位立板61内部之间连接有限位弹簧63,四个定位立板61顶部都固接有定位立架64,四个定位立架64分别与四个光学传感器4固定连接,四个定位立架64均与检测底箱1滑动连接。
44.首先操作人员将背光板放置在前后两侧运料皮带组件51左侧,启动伺服电机56工作,伺服电机56通过两个换向锥齿轮55带动换向横轴54正转,换向横轴54正转带动通过皮带传动带动右方传动横轴52正转,左右两侧传动横轴52正转均带动前后两侧运料皮带组件51正转,前后两侧运料皮带组件51正转带动背光板向右移动,四个缓震垫21可实现避免本装置产生晃动,同时,启动四个光学传感器4工作,进而背光板向右移动与四个光学传感器4对应,光学传感器4也就将检测结果传输至电脑上,也就完成了对背光板的光学检测,随后背光板继续向右移动,人们即可取下背光板进行后续处理,如此反复,可不断对背光板的光线强度进行光学检测,全部背光板光线强度都光学检测完成后,关闭伺服电机56和光学传感器4,伺服电机56停止通过两个换向锥齿轮55带动换向横轴54正转,前后两侧运料皮带组件51也就停止正转。
45.实施例2
46.在实施例1的基础之上,如图6-图10所示,还包括有夹紧机构7,夹紧机构7包括有旋转圆座72、铰接连杆73、定位齿条74、从动齿轮75、开槽短轴76、内螺纹短板77、夹紧底块78、第一缓冲弹簧79和助动滚轮710,检测底箱1前后两侧左下部都转动式连接有旋转圆座72,前后两侧的旋转圆座72与左方传动横轴52之间均通过皮带传动,前后两侧旋转圆座72外部都转动式连接有铰接连杆73,检测底箱1前后两侧中下部都滑动式连接有定位齿条74,前后两侧定位齿条74分别与前后两侧铰接连杆73转动连接,检测底箱1前后两侧中部都转动式连接有开槽短轴76,前后两侧开槽短轴76外部通过键连接的方式固定连接有从动齿轮
75,前后两侧从动齿轮75分别与前后两侧定位齿条74啮合,检测底箱1前后两侧中上部都滑动式连接有夹紧底块78,夹紧底块78可实现对背光板定位,前后两侧夹紧底块78下部中间都滑动式连接有内螺纹短板77,前后两侧内螺纹短板77分别与前后两侧开槽短轴76螺纹式连接,前后两侧夹紧底块78内部分别与前后两侧内螺纹短板77上部之间左右对称连接有第一缓冲弹簧79,前后两侧夹紧底块78中部都间隔转动式连接有助动滚轮710。
47.如图6、图11、图12和图13所示,还包括有限位机构8,限位机构8包括有连接横杆81、定位套筒82、定位弹簧83、限位横杆84、固定横杆85、限位底座86、限位底块87和第二缓冲弹簧88,检测底箱1前后两侧右中部都滑动式连接有限位横杆84,前后两侧限位横杆84外部都固接有定位套筒82,前后两侧定位套筒82内都滑动式连接有连接横杆81,前后两侧连接横杆81分别与前后两侧定位齿条74固定连接,前后两侧连接横杆81右部分别与前后两侧定位套筒82内部之间连接有定位弹簧83,检测底箱1前后两侧右下部都转动式连接有固定横杆85,前后两侧固定横杆85内侧固接有限位底座86,前后两侧限位底座86内都滑动式连接有限位底块87,限位底块87可实现对背光板进一步定位,前后两侧限位底座86内部分别与前后两侧限位底块87底部之间固接有两根第二缓冲弹簧88。
48.如图14-图17所示,还包括有检测定位机构9,检测定位机构9包括有定位横杆91、限位连架92、定位横板93、第一复位弹簧94、带柱圆盘95和开槽横板96,前方左右两侧定位立板61前侧面上部之间固接有定位横杆91,后方左右两侧定位立板61后侧面上部之间也固接有定位横杆91,检测底箱1前后两侧右下部都滑动式连接有限位连架92,前后两侧限位连架92分别与右方前后两侧定位立板61固定连接,检测底箱1前后两侧右下部都前后对称固接有两个定位横板93,前方两个定位横板93与前方限位连架92固定连接,后方两个定位横板93与后方限位连架92固定连接,四个定位横板93底部与检测底箱1内部都固接有两根第一复位弹簧94,前后两侧固定横杆85内端都固接有带柱圆盘95,前后两侧限位连架92内侧都固接有开槽横板96,前后两侧开槽横板96分别套于前后两侧带柱圆盘95上,前后两侧开槽横板96分别与前后两侧带柱圆盘95滑动连接。
49.当伺服电机56工作时,左方传动横轴52正转带动通过皮带传动分别带动前后两侧旋转圆座72正转,前后两侧旋转圆座72正转分别带动前后两侧铰接连杆73向右移动,前后两侧铰接连杆73向右移动分别带动前后两侧定位齿条74向右移动,前后两侧定位齿条74向右移动分别带动前后两侧从动齿轮75反转,前后两侧从动齿轮75反转分别带动前后两侧开槽短轴76反转,前后两侧开槽短轴76反转分别带动前后两侧内螺纹短板77向内移动,前后两侧内螺纹短板77向内移动分别带动前后两侧夹紧底块78向内移动,第一缓冲弹簧79起到缓冲作用,前后两侧夹紧底块78向内移动对背光板进行夹紧定位,避免背光板前后产生偏移,且前后两侧夹紧底块78向内移动对背光板进行定位时,背光板可继续向右移动,助动滚轮710起到导向作用,随后左方传动横轴52继续分别通过皮带传动带动前后两侧旋转圆座72正转,前后两侧夹紧底块78也就向外移动复位,如此反复,可不断对背光板进行定位,全部背光板光线强度都光学检测完成后,关闭伺服电机56和光学传感器4,左方传动横轴52分别停止通过皮带传动带动前后两侧旋转圆座72正转,前后两侧夹紧底块78也就停止前后移动,如此,可方便对背光板进行定位。
50.初始时,前后两侧定位弹簧83均压缩状态,当伺服电机56工作时,前后两侧运料皮带组件51正转带动背光板向右移动,背光板向右移动与前后两侧限位底块87接触,前后两
侧限位底块87对背光板挡住,避免背光板向右移动过快,影响光学检测效果,随后前后两侧铰接连杆73向右移动分别带动前后两侧连接横杆81向右移动,前后两侧定位弹簧83不断拉伸复位,前后两侧定位弹簧83复位最大行程后,前后两侧连接横杆81继续向右移动分别带动前后两侧定位套筒82向右移动,前后两侧定位套筒82向右移动分别带动前后两侧限位横杆84向右移动,前后两侧限位横杆84向右移动分别带动前后两侧限位底座86向右摆动,前后两侧限位底座86向右摆动分别带动前后两侧限位底块87向右摆动,进而背光板继续向右移动从前后两侧限位底块87上滑过,第二缓冲弹簧88起到缓冲作用,随后前后两侧铰接连杆73分别带动前后两侧连接横杆81向左移动复位,前后两侧限位底块87也就向左摆动复位,且前后两侧连接横杆81继续向左移动,前后两侧定位弹簧83也就被压缩,全部背光板光线强度都光学检测完成后,关闭伺服电机56和光学传感器4,前后两侧限位底块87也就停止左右摆动,如此,可进一步对背光板进行定位。
51.当背光板被定位在四个光学传感器4正下方时,前后两侧限位底座86向右摆动分别带动前后两侧固定横杆85正转,前后两侧固定横杆85正转分别带动前后两侧带柱圆盘95正转,前后两侧带柱圆盘95正转分别带动前后两侧开槽横板96向下移动,前后两侧开槽横板96向下移动分别带动前后两侧限位连架92向下移动,第一复位弹簧94被压缩,前后两侧限位连架92向下移动分别带动右方前后两侧定位立板61向下移动,右方前后两侧限位弹簧63被压缩,同时,右方前后两侧定位立板61向下移动分别带动前后两侧定位横杆91向下移动,前后两侧定位横杆91向下移动带动左方前后两侧定位立板61向下移动,左方前后两侧限位弹簧63被压缩,进而四个定位立板61向下移动分别带动四个光学传感器4向下移动,使得背光板更好的被光学检测,随后前后两侧固定横杆85分别通过带柱圆盘95带动前后两侧开槽横板96向上移动复位,因四根限位弹簧63的作用,四个定位立板61分别通过四个定位立架64带动四个光学传感器4向上移动复位,如此,可更好对背光板进行光学检测。
52.实施例3
53.在实施例1和实施例2的基础之上,如图14和图18所示,还包括有清洁机构10,清洁机构10包括有海绵滚轮101、连接短杆102和第二复位弹簧103,检测底箱1左部上侧前后对称固接有连接短杆102,前后两侧连接短杆102左部之间转动式连接有海绵滚轮101,海绵滚轮101可实现对背光板进行清理,前后两侧连接短杆102底部与检测底箱1左侧面上部之间都固接有第二复位弹簧103。
54.当背光板放置在前后两侧运料皮带组件51左侧时,前后两侧运料皮带组件51正转带动背光板向右移动,同时,因前后两侧第二复位弹簧103的作用,前后两侧连接短杆102始终带动海绵滚轮101向下接触与背光板接触,随后背光板向右移动被海绵滚轮101清理,如此,可避免背光板上残留灰尘或杂质,影响光学检测结果。
55.应当理解,以上的描述仅仅用于示例性目的,并不意味着限制本发明。本领域的技术人员将会理解,本发明的变型形式将包含在本文的权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1