一种基于多线结构光点云数据的轮对尺寸测量方法
1.本发明涉及城轨列车轮对尺寸自动检测技术领域,特别是一种基于多线结构光点云数据的轮对尺寸测量方法。
背景技术:
2.随着城轨列车的数量不断增长,运行里程不断增大,对城轨列车运行安全要求也更加严格。轮对是城轨列车行走部的关键部件,保障着列车的运行安全和乘客乘车体验。作为列车与轨道直接接触的重要部件,列车在行驶过程中加速、制动、转向所产生的挤压、摩擦和冲击都直接作用在轮对上。轮对的尺寸结构在不断受到磨损,当其机械结构及尺寸变形超出某个范围时,就会产生安全隐患。因此,需要及时对轮对进行检测,保障其结构尺寸在安全范围内,进而保障列车的运行安全。
3.西南交通大学和主导科技联合研发了轮对在线检测系统ly系列轮对故障检测系统,该系统运用线结构光测量技术实现了轮对尺寸的测量,同时整合超声波等技术,实现了踏面擦伤等更多的故障检查功能,系统自动化检测程度高、功能完备,但结构复杂、成本高,不利于广泛推广。冯其波2017年的发明专利《基于结构光的车轮多参数在线测量系统及其测量方法》公开了基于多线结构光的轮对测量装置,但其测量方法精确程度较低,轮对尺寸测量的精度有待提高。
技术实现要素:
4.本发明的目的在于提供一种能够适应于现场运行环境、测量速度快、抗干扰能力强、测量精度高的基于多线结构光点云数据的轮对尺寸测量方法。
5.实现本发明目的的技术解决方案为:一种基于多线结构光点云数据的轮对尺寸测量方法,包括以下步骤:
6.步骤1、通过安装在车段正线上的多线结构光测量系统,获取运行列车轮对表面的三维多线点云数据;
7.步骤2、将运行列车轮对表面的三维多线点云数据按照不同的线结构光与轮对表面相交的截面轮廓进行分类;
8.步骤3、依据步骤2中的分类后的三维多线点云数据,通过随机一致性采样算法,拟合轮对的外侧面,作为轮对尺寸测量的基准平面;
9.步骤4、依据步骤3中的基准平面,通过滚动圆的定义,在三维多线点云数据中确定踏面特征点,并通过踏面特征点拟合滚动圆,得到轮对轮径参数;
10.步骤5、基于步骤3中的基准平面法向量和步骤4的滚动圆圆心,确定轮对转动轴;
11.步骤6、通过轮对转动轴和踏面点云建立辅助平面,获得轮对的二维截面轮廓线;
12.步骤7、在轮对的二维截面轮廓线上,获得轮对的轮缘参数。
13.本发明与现有技术相比,其显著优点在于:(1)基于多线结构光点云数据,能够适应于现场动态运行环境、测量速度快、抗干扰能力强;(2)结合轮对结构特征进行三维测量,
测量理论成熟,精度高;(3)利用了大量的多线结构光三维点云数据,能够有效避免随机误差。
附图说明
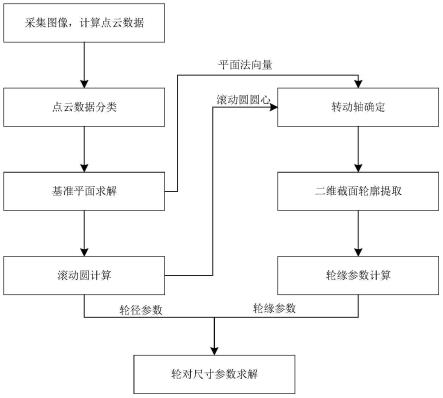
14.图1为本发明一种基于多线结构光点云数据的轮对尺寸测量方法的流程示意图。
15.图2是本发明中硬件位置敷设的结构示意图。
16.图3为本发明中的轮对尺寸测量原理图及轮对各特征的空间结构示意图。
17.图4为本发明实例中外侧基准平面拟合结果曲线图。
18.图5为本发明实例中轮对滚动圆拟合结果及轮径参数计算结果示意图。
19.图6为本发明实例中用于二维轮廓截面提取的辅助平面示意图。
20.图7为本发明实例中二位截面轮廓曲线提取前的三维截面轮廓和提取后的二维截面轮廓的数据曲线图。
21.图8为本发明实例中的局部曲线拟合结果和特征点提取结果曲线图。
具体实施方式
22.下面结合附图和实施例对本发明做进一步的说明。
23.结合图1,本发明一种基于多线结构光点云数据的轮对尺寸测量方法,步骤如下:
24.步骤1、通过安装在车段正线上的多线结构光测量系统,获取运行列车轮对表面的三维多线点云数据;
25.步骤2、将运行列车轮对表面的三维多线点云数据按照不同的线结构光与轮对表面相交的截面轮廓进行分类;
26.步骤3、依据步骤2中的分类后的三维多线点云数据,通过随机一致性采样算法,拟合轮对的外侧面,作为轮对尺寸测量的基准平面;
27.步骤4、依据步骤3中的基准平面,通过滚动圆的定义,在三维多线点云数据中确定踏面特征点,并通过踏面特征点拟合滚动圆,得到轮对轮径参数;
28.步骤5、基于步骤3中的基准平面法向量和步骤4的滚动圆圆心,确定轮对转动轴;
29.步骤6、通过轮对转动轴和踏面点云建立辅助平面,获得轮对的二维截面轮廓线;
30.步骤7、在轮对的二维截面轮廓线上,获得轮对的轮缘参数。
31.进一步地,步骤1所述通过安装在车辆段正线上的多线结构光测量系统,获取运行列车轮对表面的三维多线点云数据,结合图2,具体如下:
32.所述安装在车辆段正线上的多线结构光测量系统,包括车轮内外两侧的采集模块,每侧采集模块包括相机和多线激光发射器,内外两侧采集模块的设备安装关于轨道镜像对称;所述相机仰角为45
°
,光心位置和轨腰平齐,和轨道水平距离20cm;所述多线激光发射器与同侧相机高度相同,和同侧相机平行于轨道设置,距离同侧相机35cm。
33.进一步地,步骤1所述的所述的通过安装在车辆段正线上的多线结构光测量系统,获取运行列车轮对表面的三维多线点云数据,具体如下:
34.步骤1.1、标定相机参数;
35.步骤1.2、标定多线结构光的光平面方程;
36.步骤1.3、列车经过时多线激光发射器和相机工作,得到轮对多线结构光图片;
37.步骤1.4、对原始图片进行处理,通过光平面方程将激光的二维图像转换为三维多线点云数据。
38.进一步地,步骤2所述将运行列车轮对表面的三维多线点云数据按照不同的线结构光与轮对表面相交的截面轮廓进行分类,结合图3,具体如下:
39.步骤2.1、设定φ为轮对表面,外侧多线结构光平面按照从上往下依次为π1、π2、
…
、πk;
40.步骤2.2、将运行列车轮对表面的三维多线点云数据按照不同的线结构光与轮对表面相交的截面轮廓进行分类,将第i条线结构光平面上的结构光点云数据使用集合qi保存,其中0《i《k,测量坐标系中qi满足:
41.qi={q|q=(x,y,z),q∈φ,q∈πi}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
42.其中,πi表示第i个光平面方程,φ表示轮对表面;
43.步骤2.3、将所有三维多线点云数据使用一个集合q0表示,q0满足:
44.q0=q1∪q2∪
…
∪qkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
45.进一步地,步骤3所述依据步骤2中的分类后的三维多线点云数据,通过随机一致性采样算法,拟合轮对的外侧面,作为轮对尺寸测量的基准平面,具体如下:
46.步骤3.1、设定轮对外侧基准面的平面方程为:
47.z=ax+by+c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
48.其中,a,b,c为平面方程参数;
49.步骤3.2、在q0中随机选取三点{p1(x1,y1,z1)、p2(x2,y2,z2)、p3(x3,y3,z3)};
50.步骤3.3、通过{p1(x1,y1,z1)、p2(x2,y2,z2)、p3(x3,y3,z3)}确定一个平面s,通过式(4)确定平面方程参数a、b、c;
[0051][0052]
步骤3.4、设定q0中距离平面s不大于阈值ε的三维多线点云数据点为平面s的内点,假设q0中任一三维多线点云数据点pi(xi,yi,zi)∈q0与平面s的距离为di,公式为:
[0053][0054]
记录满足di≤ε的内点数量;
[0055]
步骤3.5、重复步骤3.1~步骤3.4循环k次,选择内点最多的平面作为最佳拟合平面s*,对应的内点集合为最佳内点集合p*,其中迭代次数k通过式(6)计算:
[0056][0057]
其中,m为q0中三维多线点云数量,n为三维多线点云中符合平面特征得数量,φ拟合得到平面得期望概率,其取值范围为[0.95,0.99];令τ=n/m,m、n足够大时,式(6)变换为:
[0058]
1-(1-τ3)k=φ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0059][0060]
进一步地,步骤4所述依据步骤3中的基准平面,通过滚动圆的定义,在三维多线点云数据中确定踏面特征点,并通过踏面特征点拟合滚动圆,得到轮对轮径参数,具体如下:
[0061]
步骤4.1、确定每个外侧面轮廓中的踏面基点:
[0062]
由车轮轮对外侧基准面的平面方程式(3)和轮辋宽度w,从外侧各线结构光三维轮廓数据集合qi中,筛选出最接近踏面基点的点云数据:p1、p2、
…
、pn,其中pi(xi,yi,zi)∈qi且满足:
[0063][0064]
步骤4.2、确定滚动圆所在平面π':
[0065]
空间平面圆在一平面上,踏面滚动圆与外侧平面平行且相距w-70毫米,依据车轮轮对外侧基准面的平面方程式(3),确定滚动圆所在平面π'方程为:
[0066]
ax+by+c'=z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0067]
其中,c'为常数项参数;
[0068]
步骤4.3、通过踏面基点构造圆心的约束方程:
[0069]
根据任意两个基点的连线可构成圆上的一条弦,圆上任意弦的中垂线都经过圆心,构建圆心的约束方程:设定圆心为p0(x0,y0,z0),取圆上两点:p1(x1,y1,z1)、p2(x2,y2,z2),连接p1、p2得:经过弦的中点p
12
与圆心p0的中垂线为:
[0070][0071]
由可得:
[0072][0073]
令δx
12
=x
2-x1,δy
12
=y
2-y1,δz
12
=z
2-z1,将式(12)转化为:
[0074]
δx
12
·
x0+δy
12
·
y0+δz
12
·z0-l1=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0075]
步骤4.4、由平面约束和弦垂线约束求解圆心坐标p0:
[0076]
依据圆的中垂线方程的相关性,可以通过k个观测点得出k-1个线性无关的中垂线方程,且p0满足式(10),联立可得:
[0077]
[0078]
令l=[1 l
1 l2ꢀ…ꢀ
l
k-1
]
t
,则有:
[0079]
bx-l=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0080]
由最小二乘矩阵法及式(15),可得x=[x0,y0,z0]
t
的最小二乘解:
[0081]
x=(b
t
b)-1bt
l
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0082]
步骤4.5、通过圆心坐标和踏面基点,求解轮径d和空间平面圆的曲线方程:
[0083]
由式(16)的圆心坐标p0=(x0,y0,z0),计算每个观测点pi到圆心的距离
ri
:
[0084][0085]
轮径参数即圆的拟合直径d为2倍的ri平均值,计算公式为:
[0086][0087]
结合式(10)踏面圆的空间平面圆方程为:
[0088][0089]
进一步地,步骤5所述基于步骤3中的基准平面法向量和步骤4的滚动圆圆心,确定轮对转动轴,具体如下:
[0090]
步骤5.1、单位化外侧基准平面面法向量
[0091]
步骤5.2、由基准平面法向量和滚动圆圆心,确定轮对转动轴
[0092]
进一步地,步骤6所述的通轮对过转动轴和踏面点云建立辅助平面,获得轮对的二维截面轮廓线,具体如下:
[0093]
步骤6.1、选择车轮内外侧各一条完整的三维数据点,作为原始三维截面;
[0094]
步骤6.2、通过转动轴和原始截面上任一点p建立辅助平面,在辅助平面上连接p0p,p0p与x轴,即转动轴的夹角为θ,p点与轮对转动轴的距离即为p在正截面坐标系中的y坐标:
[0095]
y=|pp0|*sinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0096]
p点在正截面坐标系中的x坐标满足:
[0097]
x=|p0p|*cosθ+|op0|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0098]
步骤6.3、在三维空间中,车轮外侧平面方程的法线是op0的方向向量,踏面圆圆心坐标p0和p点的三维坐标均已知,因此有:
[0099][0100]
当已知转动轴时,对于截面轮廓中任意三维点p(x,y,z),通过与式(20)~(22)联立,得在正截面坐标系中p点对应的二维坐标p'(x,y);
[0101]
步骤6.4、将三维截面中的所有数据点进行二维转换,得到完整的二维截面轮廓数据。
[0102]
进一步地,步骤7所述的在轮对的二维截面轮廓线上,获得轮对的轮缘参数,具体如下:
[0103]
步骤7.1、建立二维坐标系,以外侧面作为坐标系y轴,以转动轴作为x轴,在坐标系中,踏面基点的纵坐标为滚动圆半径,且距离外侧面65mm,以此为依据进行坐标轴的平移;轮缘厚特征点b在y方向上比a大10mm,轮缘高特征点则为y坐标最大点;
[0104]
步骤7.2、对理想特征点横坐标
±
0.3mm范围内的数据点进行局部最小二乘曲线拟合,得到特征点的精确坐标,然后通过式(23)和式(24)计算轮缘厚sd和轮缘高sh:
[0105]
sd=x
l-xbꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(23)
[0106]
sh=y
c-yaꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(24)
[0107]
式中,x
l
表示内侧面基准线的横坐标,xb为b点的横坐标,ya,yc分别为特征点a,c的纵坐标。
[0108]
下面结合附图及具体实施例对本发明做进一步详细说明。
[0109]
实施例1
[0110]
图2是本发明基于多线结构光点云数据的轮对尺寸测量方法中的内外侧测量模块的硬件安装示意图,内外侧相机和激光光源关于轨道对称,相机、光源和水平面的夹角为45
°
,外侧光源为多线激光,内侧光源为单线激光。测量模块与轨道相距200mm,相机与光源相距350mm,微调激光,使得在相机视野中各线结构光在轮对表面均匀成像。
[0111]
步骤1、完成测量系统标定,建立系统的测量坐标系,确定光平面的方程参数。在列车经过测量系统时,得到轮对表面的多线结构光图片,对原始图片进行处理,在建立的坐标系上获得轮对表面的三维点云数据。
[0112]
步骤2、如图3测量原理图所示,将不同线结构光平面的三维点云q0按照不同的线结构光与轮对表面相交得到的截面轮廓点云集合q1、q2、
…
、qk。
[0113]
步骤3、使用随机一致性采样算法对多线结构光点云进行外侧基准平面拟合,拟合结果如图4所示,得到外侧基准平面方程z=ax+by+c。
[0114]
步骤4、通过外侧基准面和分类后的点云得到滚动圆特征点后对滚动圆进行求解,求解结果如图5所示,得到滚动圆的圆心p0和车轮轮径为:840.352mm。
[0115]
步骤5、通过基准平面的法向量和滚动圆圆心,确定车轮转动轴并通过转动轴和踏面数据点任一点建立辅助平面,辅助平面示意图如图6所示;
[0116]
步骤6、选取合适的线结构光数据进行二位截面轮廓曲线的提取。如图7所示,分别为提取前的三维截面轮廓和提取后的二维截面轮廓。
[0117]
步骤7、对提取后的截面数据进行局部曲线拟合。
[0118]
由图7中二维截面轮廓数据可知,内侧基准线位于x=135.01直线上,踏面基点的位置区间为[64,66],轮缘厚特征点在区间[102,106]之间,轮缘高特征点在区间[118,122]之间。对这三区间中的数据点进行局部最小二乘拟合,如图8所示。在局部拟合曲线中定位特征点,各特征点坐标分别为:a(65.01,-0.01),b(103.04,9.99),c(119.58,27.94)。
[0119]
通过式(23)和式(24)计算可得,轮缘厚:sd=31.97mm,轮缘高:sh=27.95mm。
[0120]
本实施例选用的车轮为实验室的标准车轮,其轮径为840.30mm,轮缘高为28mm,轮
缘厚为32mm。本发明测量方法的测量误差小于0.1mm,测量精度远高于0.4mm的阈值要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1