一种自动竖直的高精度测绘对中杆的制作方法
1.本技术涉及一种对中杆的技术领域,尤其是涉及一种自动竖直的高精度测绘对中杆。
背景技术:
2.对中杆是配合全站仪进行使用的测绘装置,对中杆要求具有一个使用时需要被竖直地即铅垂方向设置的杆,对中杆在使用时,通常需要相应的支撑装置保持对中杆的竖直,并且在使用前需要调节对中杆至竖直的状态,每次移动后均需要观察对中杆的竖直情况。
3.申请公布号为cn104142146a的专利申请文件中公开了一种对中杆支架,包括两根支撑杆、支撑杆包括外管和套入外管中的可伸缩的内管,外管和内管通过握式锁紧件相固定;外管的末端设置有用于着地的尖头部;支撑杆通过连接组件支撑住对中杆;使用时,对中杆通过手握着握式锁紧件将两根支撑杆伸缩,进而对中杆的竖直情况进行调节,。
4.但是上述结构中发明人认为,对中杆调节过程人工调节的过程的速度较慢。
技术实现要素:
5.为了提高对中杆的竖直调节速度,本技术提供一种自动竖直的高精度测绘对中杆。
6.本技术提供一种自动竖直的高精度测绘对中杆,采用如下的技术方案:
7.一种自动竖直的高精度测绘对中杆,包括竖杆,所述竖杆的下端固定安装有水平底座;所述水平底座的下部设置有多个伸缩腿;所述伸缩腿包括外杆和内杆,所述内杆沿着外杆的长度方向滑动连接在外杆上,所述外杆远离于内杆的一端转动连接在水平底座上;所述外杆上安装有用于带动内杆滑动的驱动组件;所述水平底座的中心设置有校正杆,所述校正杆的上端球铰接在水平底座上;所述校正杆上固定设置有校正盘;所述校正盘与水平底座之间设置有多个用于检测水平底座水平性的压力传感器;所述压力传感器连接有处理器,所述处理器与驱动组件连接。
8.通过采用上述技术方案,使用时,校正杆在垂直的作用下竖直向下,当水平底座需要调节水平时,校正杆上的校正盘对多个压力传感器上的压力不同,从而多个压力传感器所测得到值通过处理器处理后带动对应的驱动组件,使对应的驱动组件能够将对应的伸缩腿的长度进行调节,进而使水平底座的水平度进行自动调节,保证竖杆的竖直,进而能够提高对中杆的竖直调节的速度。
9.优选的,所述驱动组件包括步进电机和螺杆,所述步进电机固定在外杆上,所述螺杆同轴固定在步进电机的输出轴上,所述螺杆平行于内杆设置且与内杆螺纹连接。
10.通过采用上述技术方案,步进电机工作时,步进电机带动螺杆转动,螺杆能够带动内杆相对于外杆滑动,进而能够调节伸缩腿的长度,同时能够保证内杆与外杆牢靠的支撑作用。
11.优选的,所述校正杆的上端固定设置有球壳;所述水平底座的下表面固定设置有
球体;所述球壳球铰接配合在球壳上,所述校正盘固定在球壳上并且多个压力传感器均匀分布在球体周围。
12.通过采用上述技术方案,校正杆上端设置球壳,球壳球铰接配合在球体上,进而能够使校正杆稳定安装在水平底座上,同时多个压力传感器均匀分布在球体周围,使压力传感器对校正盘与水平底座之间的检测比较准确。
13.优选的,所述校正杆的下端设置有激光测距传感器;所述激光测距传感器与处理器连接。
14.通过采用上述技术方案,激光测距传感器能够用于检测校正杆下端与地面之间的距离,进而保证竖杆上端的位置,提高对中杆高度的准确性。
15.优选的,所述水平底座的内部设置有多个定位装置,多个所述定位装置与多个伸缩腿一一对应,所述定位装置活动连接在水平底座上,并通过安装在水平底座上的推动装置驱动至定位或收回的状态。
16.通过采用上述技术方案,定位装置能够用于将多个伸缩腿处于相同的张开状态,通过多个伸缩腿同步移动,进而将激光测距传感器检测的对正杆下端处于设计的位置,然后再调节水平底座的水平度,使对中杆的快速安装。
17.优选的,所述定位装置包括定位销和复位弹簧;所述定位销竖直滑动配合在水平底座上;所述定位销通过推动装置伸出水平底座的最大长度时,定位销的端部用于与伸缩腿抵接定位;所述复位弹簧的一端抵接在定位销上,另一端抵接在水平底座上,并且复位弹簧作用在定位销上的作用力驱动定位销远离伸缩腿。
18.通过采用上述技术方案,定位销滑动连接在水平底座上,通过推动装置能够将定位销伸出水平底座最大长度,进而对伸缩腿进行定位,然后在伸缩腿支撑在地面上后,及时通过复位弹簧将定位销复位,方便伸缩腿进行长度调节。
19.优选的,所述推动装置包括电磁铁和推块,所述电磁铁固定在水平底座上;所述推块固定在电磁铁的输出端;所述推块设置在定位销远离于伸缩腿的一端。
20.通过采用上述技术方案,电磁铁固定在水平底座上,通过电磁铁将推块移动,使推块能够将定位销进行推动,以驱动定位销从水平底座内快速伸出到定位的位置。
21.优选的,所述水平底座的上表面固定设置有两个相互垂直设置有气泡水平仪。
22.通过采用上述技术方案,在水平底座上表面固定两个垂直的气泡水平仪,在水平底座调整后,通过气泡水平仪进行观察确定水平底座的调节状态,进而提高对中杆的精度。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过校正杆上的校正盘对多个压力传感器上的压力不同,使对应的驱动组件能够将对应的伸缩腿的长度进行调节,进而使水平底座的水平度进行自动调节,提高对中杆的竖直调节的速度;
25.2.通过激光测距传感器能够用于检测校正杆下端与地面之间的距离,进而保证竖杆上端的位置,提高对中杆高度的准确性;
26.3.通过定位装置能够用于将多个伸缩腿处于相同的张开状态,多个伸缩腿同步移动,进而将激光测距传感器检测的对正杆下端处于设计的位置,然后再调节水平底座的水平度,使对中杆的快速安装。
附图说明
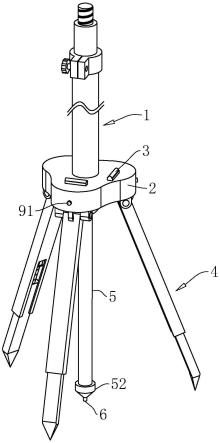
27.图1是本技术实施例的整体结构示意图;
28.图2是本技术实施例中伸缩腿的安装结构示意图;
29.图3是本技术实施例中校正杆的安装结构示意图;
30.图4是本技术实施例中定位装置的安装结构示意图。
31.附图标记说明:1、竖杆;2、水平底座;21、球体;3、气泡水平仪;4、伸缩腿;41、外杆;42、内杆;43、驱动组件;431、步进电机;432、螺杆;5、校正杆;51、球壳;52、配重块;53、校正盘;6、激光测距传感器;7、压力传感器;8、定位装置;81、定位销;82、复位弹簧;83、导向孔;9、推动装置;91、电磁铁;92、推块。
具体实施方式
32.以下结合附图1-4对本技术作进一步详细说明。
33.本技术实施例公开一种自动竖直的高精度测绘对中杆,参考图1,包括竖杆1,竖杆1的下端固定连接有水平底座2,竖杆1的上端用于安装棱镜。水平底座2的上表面与竖杆1垂直连接,通过调节水平底座2至水平的状态即可使竖杆1处于竖直的状态,水平底座2上固定有两个气泡水平仪3,气泡水平仪3可检查水平底座2上表面当前的状态,两个气泡水平仪3相互垂直设置。在水平底座2的下表面安装有多个伸缩腿4,伸缩腿4的一端铰接在水平底座2上,另一端用于支撑在地面上,伸缩腿4在本实施例中选用三个,伸缩腿4的长度可调节,当水平底座2处于需要调节的位置时,对应伸缩腿4通过长度的调节使水平底座2处于水平的状态。
34.参考图2,伸缩腿4包括外杆41、内杆42和驱动组件43;外杆41与内杆42的横截面均为矩形,内杆42的一端插入到外杆41的一端,外杆41远离于内杆42的一端铰接在水平底座2上,并且三个伸缩腿4在水平底座2的中心周围均匀分布,使三个伸缩腿4向外张开时对水平底座2的支撑作用较好,驱动组件43包括步进电机431和螺杆432,步进电机431固定在外杆41上,螺杆432平行于内杆42设置,内杆42滑动连接在外杆41上,并且内杆42相对于外杆41的滑动方向平行于内杆42,且内杆42平行于螺杆432,螺杆432与步进电机431的输出轴同轴固定连接,使步进电机431工作时,螺杆432与内杆42螺纹连接,螺杆432能够带动内杆42相对于外杆41滑动,进而调节伸缩腿4的长度。
35.参考图1和图3,在水平底座2下表面的中心位置固定设置有球体21,水平底座2通过球体21连接有校正杆5,球体21的中心位于竖杆1的中心线上,校正杆5的上端固定设置有球壳51,球壳51与球体21球铰接配合,校正杆5的一端安装球壳51,另一端安装有配重块52和处于配重块52的下部安装在朝下的激光测距传感器6;配重块52能够保持校正杆5竖直朝下,激光测距传感器6用于测量校正杆5下端与地面之间的距离。位于球壳51上固定设置有校正盘53,当校正杆5垂直于水平底座2时,水平底座2处于水平的状态,同时校正盘53平行于水平底座2的下表面,位于校正盘53与水平底座2之间安装有压力传感器7,压力传感器7用于检测水平底座2的水平性,压力传感器7有多个,本实施例选为三个且均匀分布在球体21的周围,当校正盘53与水平底座2的下表面平行时,三个压力传感器7的值相等,而校正盘53与水平底座2之间倾斜时,三个压力传感器7的压力不同,压力传感器7连接有处理器,处理器与步进电机431连接,通过压力传感器7得出校正盘53与水平底座2之间的倾斜关系后,
再由步进电机431带动对应的伸缩腿4调节水平底座2的倾斜情况,以使校正杆5垂直于水平底座2,进而使竖杆1处于竖直的状态。激光测距离传感器与处理器连接,用于通过激光测距离传感器将校正杆5的下端抵接在地面上或者保持在设计的固定距离值,以吏竖杆1上安装的棱镜处于的高度能够方便查看。
36.参考图4,在水平底座2的内部安装有多个定位装置8,多个定位装置8与多个伸缩腿4一一对应。定位装置8包括定位销81和复位弹簧82,在底座内开设有竖直的导向孔83,定位销81的一端插入到导向孔83内,另一端用于伸出导向孔83。当定位销81伸出导向孔83最长的位置时,定位销81处于定位的状态,此时伸缩腿4向外张开,伸缩腿4的外侧能够抵接在定位销81的下端,进而多个定位装置8能够将多个伸缩腿4处于相同的向外张开角度,复位弹簧82套设在定位销81上,复位弹簧82的一端抵接在定位销81上,另一端抵接在导向孔83内,使复位弹簧82作用在定位销81上的作用力远离于伸缩腿4的方向,以使定位销81能够脱离对伸缩腿4的定位。在水平底座2上固定安装有推动装置9,推动装置9包括电磁铁91和推块92,电磁铁91固定在水平底座2上,推块92同轴固定在电磁铁91的输出端,推块92用于对定位销81产生作用下使定位销81向外伸出,推块92对应安装在定位销81远离于伸缩腿4的一端,推块92的端部设置成锥形,方便推块92对定位销81进行挤压。当在电磁铁91的作用下,推块92沿着垂直于定位销81的方向对定位销81的端部进行挤压,使定位销81从水平底座2内伸出到最大的长度;电磁铁91松开推块92时,复位弹簧82能够使定位销81向上恢复到导向孔83内处于收回的状态。
37.本实施例工作过程:
38.首先,电磁铁91先将多个定位销81处于定位的状态,从而将多个伸缩腿4向外张开到相同的角度,电磁铁91将多个定位销81处于收回的状态;然后同步调节三个伸缩腿4的长度,使校正杆5的下端处于设计置的附近,然后再根据压力传感器7的测量值对水平底座2的水平度进行调节,调节的过程保持校正杆5下端的位置不变,进而能够使竖杆1自动调节到竖直的位置,同时保证竖杆1的高度。
39.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1