用于估计车辆中的电池单体的操作参数的方法与流程
1.本发明涉及一种用于估计包括在车辆的电动推进系统中的电池单元的电池单体的操作参数的方法。
2.本发明可以应用于任何类型的混合动力车辆或电动车辆,诸如部分或完全电动车辆。尽管本发明将针对电动公交车进行描述,但是本发明不限于这种特定车辆,而是也可以用于其他混合动力或电动车辆,诸如电动卡车、电动建筑装备和电动汽车。本发明还可以应用于任何其他类型的电动车辆,诸如电动建筑装备、电动作业机械,例如轮式装载机、铰接式运输机、自卸卡车、挖掘机和挖掘装载机等。
背景技术:
3.电池正成为为车辆提供推进的更常见的功率源。这种电池通常是可充电电池,并且通常包括多个电池单体,这些电池单体可以串联或并联连接,从而形成用于车辆的完整电池组。通常,电池组包括多个电池单体。电池组的质量部分地取决于每个电池单体的质量,从而设置电池单体的生产质量方面的严格要求。然而,尽管具有高质量,电池单体仍然可能具有稍微不同的容量,并且还可能由于例如每个电池单体的不同操作温度而不同地老化。
4.为了确定充电状态(soc)并提供串联单体的可配置电池组的容量估计,可以使用关于电池单体电压和电池组电流的平均值的数据。这些估计通常假设所有电池单体的电化学特性大致相同。然而,电池单体的soc水平最终会偏离,从而导致不均匀的充电状态分布,这限制电池组的操作性能。此外,当由于老化和电池单体的不同电化学特性而在电池单体之间存在差别时,平均电池单体电压的变化可能不能以准确的方式表示每个单体的容量。此外,电池组组件的总容量通常受到具有最低容量的单个电池单体的限制。
5.而且,电池的soc水平和其他操作条件通常使用电池组的一个或几个电池单体的模型来估计。常见类型的电池模型包括等效电路模型,通过该等效电路模型可以获得电池模型的电流
‑
电压特性。算法与模型一起使用,并且通常需要与电池相关的输入,例如电池的电池单体的容量和阻抗。然而,这种输入通常随着电池老化而改变,这使得估计更加复杂。另外,重要的是算法的输入是准确的,以便避免例如充电状态的不精确估计。
6.进一步,在混合动力车辆或电动车辆中,通常需要对针对各种操作条件的电池特性具有足够好的了解。因此,越来越需要在这种车辆中提供车载容量估计。
7.作为示例,电池单体的容量可以通过使用车辆空闲或操作时间期间的开路电压和soc相关性的基于电压的估计方法来估计。在farmann,a等人的“critical review of on
‑
board capacity estimation techniques for lithium
‑
ion batteries in electric and hybrid electric vehicles(对电动和混合动力车辆中锂离子电池的车载容量估计技术的评论)”journal of power sources 281(2015):114
‑
130中描述了用于电池单体的容量估计的可能方法的一些示例。然而,由于复杂的算法,用于估计电池单体的容量的可用方法中的至少一些需要较长的计算时间。
8.因此,期望的是提供一种用于有效估计操作参数(诸如电池单体的容量)的方法。特别地,期望的是提供一种用于估计车辆的操作期间的电池单体的操作参数的方法。
技术实现要素:
9.本发明的目的是提供一种用于估计操作参数(诸如包括在车辆的电动推进系统中的电池单元的电池单体的容量或阻抗)的改进方法。该目的至少部分通过根据权利要求1的方法来实现。
10.根据本发明的第一方面,提供了一种用于估计车辆的电动推进系统中的电池单元的电池单体的操作参数的方法。操作参数指示电池单体的容量和阻抗中的一个。该方法包括以下步骤:选择电池单元中的至少一个电池单体,以确定电池单体的操作参数;提供一组充电状态(soc)估计器,每个soc估计器在给定时间段内具有所选择的操作参数值;以及使用该组soc估计器通过执行电压误差最小化来确定电池单体的操作参数的值。
11.通过根据示例实施例的方法的步骤,可以提供用于估计操作参数(诸如车辆中的电池单元的电池单体的容量)的一种精确且计算有效的方法,特别地通过使用一组soc估计器来确定操作参数的值(例如容量值)。换句话说,本发明基于这样的认识,即更准确地估计电池单体的操作参数值通过在具有不同容量设置的一些时间段内利用一组soc估计器是可能的。因此,根据示例实施例的方法基于更正确的单体模型参数值来提供更好的soc估计。
12.应当注意的是,本文提及的示例实施例和示例优点通常是在操作参数指电池单体的容量时描述的。精确的容量估计允许准确的行驶里程预测和车辆中电池的最大能量存储容量的精确计算。同时,准确的容量估计可以充当电池健康状态和剩余使用寿命估计的指示符。至少部分地由于寿命和健康状态之间的、电池单体的容量和健康状态之间的相关性,例如电池单体的容量随着年龄而降低。
13.然而,还可能的是在操作参数指的是电池单元的电池单体的阻抗时执行该方法。因此,本文提及的示例优点适用于当操作参数指的是电池单元的电池单体的容量和电池单体的阻抗两者时。
14.该方法的示例实施例对于在电动推进系统的正常操作期间估计电池单元的电池单体的容量特别有用。作为示例,根据示例实施例的方法可以用作电池单元管理系统的集成部分。因此,电池单元的一个或多个电池单体的容量可以在车辆上(或在线)加以估计,并且通常在车辆的操作期间加以估计。
15.换句话说,操作参数例如可以是电池单体容量参数或电池单体的阻抗(例如电阻或电容)。根据一个示例实施例,操作参数可以是电池单体的容量。根据另一示例实施例,操作参数可以是电池单体的阻抗。
16.在估计电池单体的容量的情况下,术语“容量”指的是一种度量,通常以由所选择的电池单体存储的电荷的安培小时(ah)为单位。电池容量代表在某些给定条件下可以从电池单体中提取的最大量的能量。然而,电池单体的实际能量存储能力可能与“标称”额定容量相差很大,因为电池单体容量取决于电池的年龄和过去历史、电池的充电或放电方式以及温度。
17.作为示例,容量值是通过诸如标称电池单体容量的基础值获得的归一化容量值。容量值也可以是无量纲的相对容量值。
18.在估计电池单体的阻抗的情况下,操作参数可以是电池的电池单体的等效电路模型的参数。例如,这样的操作参数可以是内部电阻r0,或者等效电路模型的rc电路的电阻部分r1或电容c1。
19.根据一个示例实施例,使用该组soc估计器通过执行电压误差最小化来确定电池单体的操作参数值的步骤包括执行曲线拟合的步骤。使用“曲线拟合”以便找到电压误差的最小值,并且然后找到电池单体的操作参数的值,例如电池单体的容量值。曲线拟合的一个优点是,该方法可以用该组中的较少量的soc估计器来执行。作为示例,soc估计器的数量可以是三个。部分地由于在执行容量估计时降低了计算复杂度,曲线拟合还提供了相对便宜的方法。作为示例,曲线拟合是回归分析。
20.根据一个示例实施例,执行曲线拟合的步骤对应于多项式拟合。使用多项式拟合的一个优点是该方法的计算复杂度进一步降低。作为示例,多项式拟合是二阶多项式和四阶多项式中的一个。
21.根据一个示例实施例,确定电池单体的操作参数值的步骤包括识别最小化多项式的操作参数值的步骤。
22.作为示例,电池的操作参数的值对应于最小化电压误差的一些残差的soc估计器。电压误差的残差通常对应于基于电池单体端子电压的残差,即利用soc估计器估计的单体电压和测量的电压之间的误差。
23.通常,电压误差的残差是电压误差的均方根误差和l1范数中的一个。
24.根据一个示例实施例,通过使用卡尔曼(kalman)滤波来生成该组soc估计器中的soc估计器。
25.根据一个示例实施例,该方法还包括通过使用滤波算法来降低操作参数的所确定的值中的噪声的步骤。作为示例,滤波算法是具有遗忘因子以减小操作参数的所确定的值中的噪声的影响的递归最小二乘法。
26.根据一个示例实施例,该方法还包括选择与操作参数的所确定的值相邻的操作参数的相邻值,并且利用操作参数的相邻值更新soc估计器中的一个的操作参数设置中的一个的步骤。
27.根据一个示例实施例,该方法还包括监控诸如温度或soc的操作条件,并且当操作条件在给定的操作条件范围内时估计电池单体的操作参数的步骤。
28.根据示例实施例的方法可以以几种不同的方式执行。根据一个示例实施例,该方法的步骤在由电动推进系统使用电能存储系统期间由控制单元执行。通常,控制单元被配置成估计电池单体的操作参数。
29.一般而言,本文使用的术语“电动推进系统”通常指用于提供能量(例如牵引能量)和用于存储能量(递送和接收能量)的车辆电气部件。除了以上提及的电气部件之外,电动推进系统可以包括附加部件(诸如电能源),包括电池单元组件、线缆、传感器、控制单元、电池管理单元等。该电动推进系统特别地被配置为递送和接收能量,以便向车辆提供推进,还用于执行车辆的各种车辆操作。
30.电动推进系统的一个部件是电能存储系统。电能存储系统具有可连接以形成电池单元组件的多个数量的单独电池单元。
31.电池单元可以是包括多个互连的单个电池单体的电池单体串,由此电池单元组件
是用于车辆的电池组。在这个示例实施例中,多个数量的单独电池单元对应于可连接以形成呈电池组的形式的电池单元组件的多个数量的单独电池串。
32.替代性地,电池单元是包括多个电池单体串的电池组。在这种情况下,电池单元组件包括形成电池组组件的多个电池组。因此,在该示例实施例中,多个数量的单独电池单元对应于可连接以形成电池组组件的多个数量的单独电池组。
33.通常,电池单元(电池组)在电池单元组件(电池组组件)中并联连接。此外,电池单体通常在电池单体串中是串联连接的。此外,电池单体串在电池组中通常是并联连接的。
34.应当注意的是,电池单元组件可以是指一个或几个电池组。此外,应当注意的是,电池单元组件可以包括不同类型的电池。作为示例,电池单元组件中的电池中的任何一个是锂离子电池或钠离子电池中的任何一个。钠离子电池通常包括任何类型的钠铁电池或钠铁氧体电池。因此,电池单元组件通常包括一组电池组。而且,要注意的是,电池组通常是所谓的高压电池组。在这种情况下,术语“高压”指的是大约400至1000伏特(v)的电池组。
35.进一步,本文使用的术语“功率”通常指电功率。电功率是电压和电流的乘积。
36.在本发明的示例实施例的上下文中,本文使用的术语“充电状态(soc)”是指电池单元组件的当前状态下的可用容量。soc还可以包括或代表电池单体、单个电池单元、单个电池组、电能存储系统或其组合的充电水平。soc通常以新电池单体的可用容量和额定容量或电池单体的当前容量之间的百分比(%)来确定。
37.在包括电池组组件的电动车辆中,soc具有几个不同的目的,例如它可以用作整体车辆能量管理中的其他电池管理功能的输入(包括但不限于sop、soq、sor、soe),在充电策略中,作为寿命估计器的输入、作为老化时间估计器的输入、作为分析故障情况时的输入、以及作为范围估计的输入或它们的组合。
38.如上所提及那样,方法的示例实施例和方法的序列/步骤由控制单元执行。因此,根据一个示例实施例,该方法的步骤由控制单元在电动推进系统和/或车辆的普通使用期间执行。只要车辆可操作,该方法就可以连续运行,但是当在使用电池单元的同时(例如在充电操作期间)车辆处于非操作状态时,该方法也可以连续运行。因此,短语“在电池单元的使用期间”可以指电池单元的充电的状态,以及指在车辆的操作(例如车辆的驾驶)期间使用电池单元(使电池单元放电)的状态。
39.只要该方法能够提供相关联的功能和效果,该方法的序列同样地可以由其他类型的部件和其他技术来执行。而且,该方法同样地可以被实施为用于控制电池单元的模型,该模型包括构成电能存储系统的电池单元的等效电路。常见类型的电池模型包括等效电路模型,通过该等效电路模型可以获得模型电池的电流
‑
电压响应。
40.如上所提及那样,在一个示例实施例中,提供了一种用于估计车辆的电动推进系统中的电池单元的电池单体的容量的方法。在该示例中,该方法包括以下步骤:选择电池单元中的至少一个电池单体,以便确定电池单体的容量;提供一组充电状态(soc)估计器,每个soc估计器在给定时间段内具有所选择的容量值;以及使用该组soc估计器通过执行电压误差最小化来确定电池单体的容量值。
41.根据本发明的第二方面,提供了一种包括程序代码装置的计算机程序,当该程序在计算机上运行时,该程序代码装置用于执行第一方面的示例实施例中的任何一个的步骤。本发明的第二方面的效果和特征在很大程度上类似于上面结合第一方面描述的那些效
果和特征。
42.根据本发明的第三方面,提供了一种承载计算机程序的计算机可读介质,该计算机程序包括程序代码装置,当程序产品在计算机上运行时,该程序代码装置用于执行第一方面的实施例中的任何一个的步骤。本发明的第三方面的效果和特征在很大程度上类似于上面结合第一方面描述的那些效果和特征。
43.根据本发明的第四方面,提供了一种用于车辆的电动推进系统。电动推进系统包括:电动机,该电动机用于向车辆提供功率;电能存储系统,该电能存储系统连接到电动机以向电动机提供功率,该电能存储系统具有包括多个电池单体的多个电池单元;控制单元,该控制单元用于估计至少一个电池单体的操作参数,该操作参数指示电池单体的容量和阻抗中的一个。控制单元被配置为选择至少一个电池单元中的至少一个电池单体、提供一组充电状态(soc)估计器,每个soc估计器在给定时间段内具有所选择的操作参数值。而且,控制单元被配置成使用该组soc估计器通过电压误差最小化来确定电池单体的操作参数的值。
44.本发明的第四方面的效果和特征在很大程度上类似于上面结合第一方面描述的那些效果和特征。电动推进系统可以部分或全部地结合并安装在电动车辆中。
45.电动机可以以几种不同的方式提供。根据一个示例实施例,电动机是永磁同步电机、无刷dc电机、异步电机、电磁化同步电机、同步磁阻电机或开关磁阻电机中的任何一种。通常,电动机被配置成用于驱动至少一个地面接合构件。通常,电动机被配置成用于驱动一对地面接合构件。作为示例,地面接合构件是车轮、履带等。电动机可以以几种不同的方式耦接到地面接合构件。在一个示例实施例中,电动机通过变速器和离合器耦接到一对地面接合构件。变速器通常包括包括空挡的多个齿轮。
46.控制单元可以包括微处理器、微控制器、可编程数字信号处理器或另一可编程设备。因此,控制单元包括电子电路和连接件以及处理电路系统,使得控制单元可以与电动推进系统的不同部分通信,诸如电机和电池系统,以便提供示例实施例的功能。通常,控制单元还可以被配置为与车辆的其他部分通信,诸如制动器、悬架、离合器、变速器和另外的电气辅助设备(例如空调系统),以便至少部分地操作公交车。控制单元可以包括呈硬件或软件形式的模块、或者部分地呈硬件或软件的、并且使用已知的传输总线(诸如can总线)和/或无线通信能力进行通信的模块。处理电路系统可以是通用处理器或专用处理器。控制单元通常包括用于存储计算机程序代码和数据的非瞬态存储器。因此,控制单元可以由许多不同的构造实现。
47.换句话说,该方法和/或电动推进系统的示例实施例的控制功能可以使用现有的计算机处理器来实施,或者通过用于为了这个或另一目的而结合的适当系统的专用计算机处理器来实施,或者通过硬线系统来实施。本公开的范围内的实施例包括程序产品,该程序产品包括用于承载或具有存储在其上的机器可执行指令或数据结构的机器可读介质。这种机器可读介质可以是可以由通用或专用计算机或具有处理器的其他机器访问的任何可用介质。作为示例,这种机器可读介质可以包括ram、rom、eprom、eeprom、cd
‑
rom或其他光盘存储、磁盘存储或其他磁存储设备、或者可以用于以机器可执行指令或数据结构的形式承载或存储期望的程序代码并且可以由通用计算机或专用计算机或具有处理器的其他机器访问的任何其他介质。当信息通过网络或其他通信连接(硬连线、无线或硬连线和无线的组
合)传输或提供给机器时,机器正确地将该连接视为机器可读介质。因此,任何这样的连接恰当地被称为机器可读介质。以上内容的组合也包括在机器可读介质的范围内。机器可执行指令包括例如使通用计算机、专用计算机或专用处理机执行某一功能或功能群组的指令和数据。虽然以上描述的电动推进系统的示例实施例包括作为其整体部分的控制单元,但是控制单元也可以是车辆的分离部分,和/或远离电动推进系统布置并与电动推进系统通信。
48.控制单元还可以包括一个电池单元或多个电池单元或其组合的模型。因此,电能存储系统通常包括被配置成控制电池单元组件的功能的控制单元。换句话说,电能存储系统通常是车辆推进系统的一部分。电能存储系统还可以包括所谓的电池管理单元,该电池管理单元可以是控制单元的集成部分或者系统的分离部分但是与控制单元通信。
49.控制单元通常被配置成控制和监控电池组组件。通常,尽管不是严格要求,但是控制单元包括电池管理单元,该电池管理单元被配置为监控电池单体特性,诸如电池单体的充电状态(soc)和开路电压。电池管理单元的其他功能可以涉及安全功能,诸如功率状态和/或闭合接触器。
50.根据本发明的第五方面,提供了一种车辆(诸如全电动或混合电动车辆),该车辆包括根据以上提及的示例实施例中的任何一个的电动推进系统。本发明的第五方面的效果和特征在很大程度上类似于上面结合第一方面描述的那些效果和特征。
51.该车辆可以是包括电动机的电动车辆、混合动力车辆或插入式混合车辆,其中电池单元组件向电动机提供功率,用于为车辆提供推进。要注意的是,车辆因此可以是部分或全电动车辆。
52.当研究所附权利要求和以下描述时,本发明的另外的特征和优点将变得显而易见。本领域技术人员认识到,在不脱离本发明的范围的情况下,可以组合本发明的不同特征来创建处理以下描述的那些实施例的实施例。
附图说明
53.通过本发明的示例性实施例的以下说明性和非限制性详细描述,将更好地理解本发明的上述以及附加目的、特征和优点,其中:
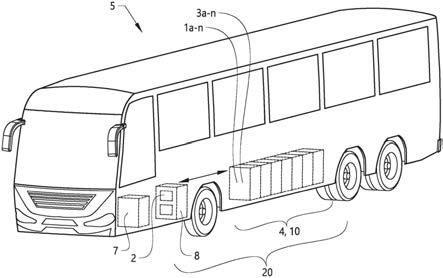
54.图1是根据本发明的示例实施例的呈电动公交车的形式的车辆的侧视图,该车辆包括电动推进系统;
55.图2a示意性地示出了描述根据本发明的示例实施例的电池单体的单体模型的部分;
56.图2b示意性地示出了当执行根据本发明的示例实施例的方法中的步骤中的一些时使用的一些计算部件的概略图;
57.图3是根据本发明的示例实施例的方法的流程图,其中该方法包括用于估计图2a中的电池单体的操作参数的多个步骤;
58.图4是根据本发明的示例实施例的图3中的方法的附加步骤的流程图;
59.图5示意性地示出了用于通过根据本发明的示例实施例的方法通过电压误差最小化来确定电池单体的容量的曲线拟合的示例;
60.图6示意性地示出了用于通过根据本发明的示例实施例的方法通过电压误差最小
化来确定电池单体的容量的曲线拟合的另一示例。
61.参考附图,以下是作为示例引用的本发明的实施例的更详细描述。
具体实施方式
62.现在将在下文中参考附图更全面地描述本发明,在附图中示出了本发明的示例性实施例。然而,本发明可以以许多不同的形式实现,并且不应该被解释为局限于这里阐述的实施例;相反,提供这些实施例是为了彻底性和完整性。本领域技术人员将认识到,在所附权利要求的范围内可以进行许多改变和修改。在整个说明书中,相同的附图标记指代相同的元件。
63.图1示出了呈电动公交车5的形式的车辆。电动公交车在此是通常完全由电能存储系统(诸如电池系统)供电的全电动车辆。电动公交车5包括被配置为向车辆提供牵引功率的电动推进系统20。电动推进系统20向电动机提供功率。然而,电动推进系统也可以适用于管理车辆的各种电子功能。电动推进系统包括电能存储系统10和电动机7。电能存储系统10连接到电动机以向电动机提供功率,从而电动机可以向一个或多个地面接合构件(未示出)(例如一个或多个车轮)提供牵引功率。电能存储系统是dc电能存储系统,诸如包括多个电池组的电池组组件。
64.电能存储系统10在此包括电池单元组件4。电池单元组件通常包括多个电池单元1
a
至1
n
。在图1描绘的电能存储系统中,电池单元是电池组。作为示例,电池组中的每一个是锂离子电池。而且,电池组中的每一个电池组包括多个电池单体。在这种情况下,电池组是包括多个电池单体3的电池。这样,电池组1
a
至1
n
中的每一个包括多个电池单体3
a
至3
n
。如图1所示,电池组组件包括七个电池组。因此,电池组组件4包括七个电池组1
a
至1
g
,这些电池组中的每一个电池组包括多个电池单体3
a
至3g。电池组组件可以包括50至500个电池单体。电池组组件中电池组的数量和电池单体的数量根据车辆的类型和安装的类型等而不同。
65.为此,电能存储系统包括连接以形成电池组组件4的多个电池组。在本发明的示例实施例的以下描述中,电池单元因此有时将被称为电池组,并且电池单元组件将被称为电池组组件。
66.因此,电池组组件4被布置为向电动机7提供功率,该电动机被布置为向电动公交车5提供推进。通常,电动公交车5还包括控制单元8,该控制单元被配置为控制和监控电能存储系统10。特别地,控制单元被配置成估计电池单体的容量。控制单元在此是电子控制单元。特别地,控制单元8被配置成控制和监控电池组组件。电动推进系统20在此包括控制单元8,该控制单元包括电池管理单元2和电池组组件4。通常,尽管不是严格要求,但是控制单元8具有电池管理单元2,该电池管理单元被配置为监控电池单体特性,诸如电池单体3的充电状态(soc)和开路电压。控制单元还设有适于存储电池等效模型的存储部件(未示出),如将结合图2a和图2b进一步讨论的那样。
67.控制单元8可以包括微处理器、微控制器、可编程数字信号处理器或另一可编程设备。因此,控制单元包括电子电路和连接件(未示出)以及处理电路系统(未示出),使得控制单元可以与车辆的不同部分通信,诸如制动器、悬架、传动系统,特别是电动机、离合器和变速箱,以便至少部分地操作公交车5。虽然以上描述的示例实施例包括作为系统20的集成部分的控制单元,但是控制单元也可以是系统20等的分离部分。
68.现在转到图2a,描绘了包括电池单体的等效电路的电池单体模型。示例性等效电路模型200包括单个rc电路来对电池单体进行建模。示例性的基于rc的等效电路模型用于估计电池单体的充电状态和容量,并且通常由以上提及的控制单元实施。图2a中示出的示例性(等效)电路模型用于估计电池单体的充电状态和容量。电池单体的表征可以通过使用直接电池测量在电池模型上进行实时参数估计方法来计算。电池单体充电状态估计可以例如基于测量的电池电流输入和电池端子电压。
69.关于图2a描述的等效电路模型由与并联电容c1串联的有源电解质电阻(或内阻)r0和有源电荷转移电阻r1组成。u
cell
指端子电压输出,i
cell
(i
单体
)指电路中的电流,以及u
ocv
指电池开路电压。对于项u
ocv
、r0、r1和c1的给定值,端子电压u
cell
(u
单体
)可以表示为电流i
cell
的函数。通常r0和r1随着年龄而增加,而电池单体容量(图中未示出)随着年龄而减小。
70.通过电池单体3a的等效电路模型,可以确定电池单体的充电状态水平。这样,可以监控电池系统的电池单体的充电状态水平。在这种情况下,要注意的是,soc估计通常基于电压和电流。因此,soc估计器的一个要素是使用soc与ocv之间的关系(ocv是没有电流时的电压)。因此,电池单体的soc是基于电池系统开路电压(ocv)来估计和确定的,开路电压在图2a中用u
ocv
指示。通过ocv确定电池单体soc在本领域中是公知的,并且通常通过测量电池单体的ocv来执行。当单体与任何外部负载断开并且没有外部电流流过单体时,通过测量电池单体的端子电压输出u
cell
来确定电池单体的ocv。ocv与电池的soc直接相关。
71.现在转到图2b,描绘了用于执行根据示例实施例的方法的计算过程的部分的一些计算部件的概率图,并且其是基于从包括电池单体的等效电路的电池单体模型接收的数据,如结合图2a所述。换句话说,图2b示出了用于通过多个充电状态(soc)估计器52a、52b、52c来估计电池单体3a的操作参数的方法的一些步骤。在这个示例中,操作参数是电池单体的容量q。要注意的是,测量的电池参数i
cell
与u
cell
关于图2a进行描述,而t指的是电池单体温度。而且,要注意的是,u
ocv
(没有电流的情况下的电压)是soc的函数。在这种情况下,端子电压是ocv和欧姆电压降的函数。欧姆电压降取决于电流和温度。由此,参数i
cell
、t和u
cell
可以用作用于估计电池单体的容量q的多个soc估计器的输入。这种类型的模型通常也被称为thevenin单体模型。还应当容易理解的是,提供最精确估计的soc估计器通常提供最准确的容量估计。
72.此外,soc估计器参数(或电池属性)q1、q2、q3分别指相对应的soc估计器soc1、soc2、soc3的电容值。也就是说,q1、q2和q3分别是每个soc估计器soc1、soc2、soc3中使用的容量。信号eu1、eu2和eu3分别是每个soc估计器soc1、soc2、soc3的残差(即电压误差)。
73.图2b中的输出被指示为q*,其对应于电池单元的电池单体的估计的或确定的容量,并且在下文中关于例如图3至图6进一步描述。如从下面的描述中很容易理解的那样,在一个示例实施例中q*由等式13至等式15确定。
74.现在转到图3,描绘了根据本发明的示例实施例的方法的流程图。特别地,描绘了用于估计指示车辆5的电动推进系统20中包括的电池单元1
a
的电池单体3a的容量q*的操作参数的方法100。通过该方法获得的估计的容量q*可以用作车辆能量管理策略中的输入数据,例如作为控制车辆电动推进系统20的车辆电能存储系统10时的输入,如以上关于图1所述。该方法的序列通常由控制单元8来执行,如上文关于图1所述。
75.该方法包括选择110电池单元(例如电池单元1
a
)中的至少一个电池单体(例如电
池单体3
a
),以便确定电池单体的容量q*。由控制单元8执行在多个电池单体当中选择电池单体。通常,电池单体的选择可以预先确定并遵循预定的时间表,例如在控制单元的软件的编程时确定。电池单体的选择也可以基于来自控制单元的输入动态地选择,以及在车辆和电动推进系统的操作期间,因此在电池单元和组成电池单元的电池单体的普通使用期间选择。
76.接下来,该方法包括提供120一组充电状态(soc)估计器。每个soc估计器具有在给定的时间段内的所选择的容量值。容量值被选择为以便包括实际容量值。以这样的方式,可以基于容量的标称值进行粗略的假设。
77.应当注意的是,待分析的电池单体的类型的参数的范围通常是已知的,并且soc估计器的所选择的容量值是在电池单体的假定容量值的附近选择的容量值,即电池单体应该具有的容量值。替代性地,可以使用迭代过程,例如从相当分散的容量值开始,并且然后找到更接近随时间推移所进行的估计的容量值(操作参数值)。
78.通常,soc估计器的所选择的容量值是离散的容量值。
79.给定时间段的长度应该是足够长的时间段。它取决于循环(电流曲线)、电池单体的类型以及各种条件,如单体温度和soc水平。作为示例,给定时间段的长度在几分钟到几小时的数量级中。给定时间段可以例如在大约0.1h至8h之间,优选地在0.5h至6h之间,还优选地在大约1.0h至4h之间。对于其他电池和条件,给定时间段可以被设置为不同的时间段。
80.在这个示例中,通过使用卡尔曼(kalman)滤波生成该组soc估计器中的soc估计器。
81.在接下来的步骤中,该方法使用130该组soc估计器来确定电池单体的容量值。通过执行电压误差最小化来识别电池单体的容量值。作为示例,使用该组soc估计器通过电压误差最小化来识别电池单体的容量值的步骤包括执行曲线拟合的步骤。曲线拟合的一个示例是回归分析。通常,如图5和图6所示,曲线拟合对应于多项式拟合。合适的多项式拟合的一个示例是二阶多项式。合适的多项式拟合的另一示例是四阶多项式。下面结合图5和图6进一步描述四阶多项式。
82.在图5和图6中,所绘的容量值是通过诸如标称电池单体容量的基础值获得的归一化容量值。
83.而且,在此识别容量值的步骤包括识别最小化多项式的容量值的步骤。特别地,电池单体的容量值对应于最小化电压误差的一些残差的soc估计器。电压误差的残差对应于基于电池单体端子电压的残差,即利用soc估计器估计的单体电压和测量的电压之间的误差。作为示例,电压误差的残差是均方根误差。替代性地,电压误差的残差是电压误差的l1范数。
84.在下文中,将描述的是多项式拟合如何解决线性最小二乘法问题,以及如何计算所获得的多项式的最小值。换句话说,下面的等式描述了如何通过执行电压误差最小化来识别电池单体的容量值。
85.假设选择了以下形式的四阶多项式:
[0086][0087]
其中
[0088]
p2,p1,p0是多项式的系数(参数),这些系数乘以多项式的变量,在上面的示例中,这些变量仅仅是电池单体容量。q
i
是按照soc估计器数量i选择的容量。
[0089]
如果该组soc估计器的大小是4,那么i={1,2,3,4}。
[0090]
对于先前的示例,要解决的最小二乘法问题是
[0091][0092]
其中
[0093]
e
ui
是soc估计器数量i的电压误差。.
[0094]
线性等式的先前的系统可以以矩阵形式写为:
[0095]
x.β=y
[0096]
ꢀꢀꢀꢀꢀꢀ
(等式4)
[0097]
其中
[0098][0099][0100][0101]
先前的最小二乘法问题的解由下式给出:
[0102]
β*
=
(x
t
.x)
‑1.x
t
.y
[0103]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(等式5)
[0104]
作为示例,q
i
的值的集合是预先设置的,则先前的表达式可以简化为
[0105]
β
*
=z.y
[0106]
ꢀꢀꢀꢀꢀ
(等式6)
[0107]
并且z=(x
t
.x)
‑1.x
t
是预先计算并存储在控制单元的存储器中的3*n的矩阵(如上所提及那样),并且n是该组中的soc估计器的数量。
[0108]
例如,对于三个soc估计器,即n=3,则需要在存储器中存储9个参数。注意,事实上
并非它们中的全部如将在下面呈现的那样是必需的,因为一些条目在算法的步骤6中是不需要的。
[0109]
因为z中的参数的数量相当小,所以可以预先计算容量值的不同组合的几个矩阵的参数,并将其存储在存储器中。
[0110]
现在参考图5中示出的三个soc估计器的示例:
[0111]
q1=1.00,q2=1.05,q3=1.10
[0112]
ꢀꢀꢀꢀꢀꢀꢀ
(等式7)
[0113]
则
[0114][0115]
接下来,步骤130中的方法找到最小化多项式的容量值。
[0116]
要解决的问题是:
[0117][0118]
改变变量后:
[0119]
d=q2[0120]
ꢀꢀꢀꢀꢀꢀ
(等式10)
[0121]
则要解决的最小化问题是:
[0122]
min(p2·
d2+p1·
d+p0)
[0123]
ꢀꢀꢀꢀꢀꢀ
(等式11)
[0124]
解是
[0125][0126]
这意味着估计的容量为:
[0127][0128]
结合上述等式等式1至等式13的结果,最小化多项式的容量是:
[0129]
对于三个soc估计器:
[0130][0131]
因此,仅需要在电子控制单元中(例如在控制单元存储器中)存储6个参数{z
11
,
z
12
,z
13
,z
21
,z
22
,z
23
}。
[0132]
因此,如图5所描绘,描绘了用于通过电压误差最小化来确定电池单体的容量的曲线拟合的一个示例。在该示例中,容量值对应于通过诸如标称电池单体容量的基础值获得的归一化容量值。而且,在此通过使用二阶多项式来确定估计的容量值。x轴是指归一化容量,并且y轴是指以伏特为单位的soc估计器单体电压误差。
[0133]
在该示例中,该方法基于使用一组三个soc估计器。该组三个soc估计器提供三个所选择的离散容量值,即标称容量的0.8、0.9和1.0。图中描绘为星形的标记指示估计的容量值q*(由以上等式14估计的值),而虚线指示电池单体的实际容量值q。在这个示例中,实际容量值是从来自电池单体的等效电路模型的数据中接收的。在该示例中,实际容量值是标称容量的0.942。要注意的是,由于使用了模拟数据,所以电池单体的实际容量值q是已知的,并且实际容量值q在此是为了说明的目的而指示的(在车辆上的实时估计中,实际容量值是未知的)。
[0134]
而且,在该示例中,使用电压误差的均方根来计算电压误差的残差。
[0135]
如从上面结合图5中的图可以得出的那样,具有3个点的估计电池单体容量q*为0.947,并且估计误差为0.53%。在这种情况下,估计误差是指估计的容量值(0.947)和实际值(0.942)之间的误差。
[0136]
对于四个soc估计器:
[0137]
在另一示例中,当结合以上等式1至等式13的结果时,对于四个soc估计器最小化多项式的容量是:
[0138][0139]
在该示例中,控制单元存储器中只需要存储8个参数{z
11
,z
12
,z
13
,z
14
,z
21
,z
22
,z
23
,z
24
}。
[0140]
因此,如图6所描绘,描绘了用于通过电压误差最小化来确定电池单体的容量的曲线拟合的另一示例。在该示例中,容量值也对应于通过诸如标称电池单体容量的基础值获得的归一化容量值。而且,在此通过使用二阶多项式来确定估计的容量值。
[0141]
在该示例中,该方法基于使用一组四个soc估计器。该组四个soc估计器提供三个所选择的离散容量值,即标称容量的0.7、0.8、0.9和1.0。图中描绘为星形的标记指示估计的容量值q*(在以上等式15中估计的值),而虚线指示电池单体的实际容量值q。在这个示例中,实际容量值q是从来自电池单体的等效电路模型的数据中接收的。在该示例中,实际容量值是标称容量的0.942。
[0142]
而且,在该示例中,使用电压误差的均方根来计算电压误差的残差。
[0143]
如从上面结合图6中的图可以得出的那样,具有4个点的估计电池单体容量q*为0.940,并且估计误差为0.22%。估计误差是指估计的容量值(0.940)和实际值(0.942)之间的误差。
[0144]
在另一示例中,尽管未示出,但是容量可以通过一组四个soc估计器并且利用电池单体电压误差的l1范数的四阶多项式拟合来估计。
[0145]
应当容易理解的是,根据各种示例实施例的方法可以在单个电池单体、多个电池单体、电池组的所有电池单体以及组成电池组组件的所有电池组的所有电池单体上执行。此外,该方法可以同时、并行地或依次地估计各个电池单体的容量。
[0146]
还可以注意到的是,控制单元8可以被配置为估计电池组中的每一个的操作功率。
[0147]
在图4中,描述了与关于图3描述的方法的一些附加步骤。在该示例中,该方法还包括步骤140,即通过使用滤波算法来降低容量的所确定的值中的噪声。作为示例,滤波算法是具有遗忘因子以减小所确定的容量值中的噪声的影响的递归最小二乘法。引入滤波算法来避免信号中的尖峰。由于容量随时间缓慢变化,因此期望的是避免由于例如测量中的不准确性而导致的估计的值中的突然变化。
[0148]
可选地,该方法还包括步骤150,即选择与步骤130中的容量的所确定的值相邻的相邻容量值,并且利用电池单体的容量参数的相邻值更新soc估计器中的一个的所选择的容量值中的一个。此后,迭代步骤130以根据步骤130和本文所述的任何后续步骤确定新的容量值。
[0149]
可选地,该方法还可以包括监控操作条件(诸如电池单体的温度或soc)的步骤。随后,该方法可以在操作条件在给定的操作条件范围内时估计电池单体的容量。
[0150]
如上所提及那样,应当注意的是,在由电动推进系统20使用电能存储系统10期间,该方法的步骤通常由控制单元8执行。
[0151]
虽然附图可以示出序列,但是步骤的顺序可能与所描绘的不同。也可以同时或部分同时执行两个或更多个步骤。这种变化将取决于所选择的软件和硬件系统和设计师选择。所有这些变化都在本公开的范围内。同样地,软件实现方式可以用标准编程技术来完成,该技术具有基于规则的逻辑和其他逻辑以完成各种连接步骤、处理步骤、比较步骤和决策步骤。附加地,尽管已经参照本发明的具体示例性实施例描述了本发明,但是对于本领域技术人员来说,许多不同的变更、修改等将变得显而易见。
[0152]
应当理解的是,本发明不限于以上描述的和附图中示出的实施例;相反,本领域技术人员将认识到,在所附权利要求的范围内可以进行许多改变和修改。例如,虽然本发明主要是关于电动公交车加以描述的,但是本发明应该理解为同样适用于任何类型的电动车辆,尤其是电动卡车等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1