一种融合磁导引、通信、定位的移动机器人导航系统的制作方法
[0001]
本发明涉及电控及自动导引运输车(agv)技术领域,特别涉及一种融合磁导引、通信、定位的移动机器人导航系统。
背景技术:
[0002]
自动导引车agv(automated guided vehicle)是车间自动化物流系统的重要组成部分,是物流系统实现自动化、智能化柔性化的核心移动搬运单元之一,而agv的导航技术是实现自动形式和定位的核心。
[0003]
目前常用的导航方式有磁导航、二维码导航、激光导航等,每种导航方式都有其适用的场合和领域,特别是在工厂内的物流自动化,这些导航方式得到了大量的应用;针对agv在不同的位置需要进行识别,传统的方式是采用rfid的方式,这就需要增加额外的传感器和控制;同时,在一些特定的场合,例如户外、变电站、军工等,传统的导航方式无法使用,无线通信也是禁止的,这就需要能适应于这些场合的新的解决方案;因此针对在一些特定的场合,传统的导航方式和无线通信的不足,本发明研制了一种融合磁导引、通信、定位的移动机器人导航系统,以解决现有技术中存在的问题,实现满足户外环境以及通信保密要求的导航解决方案,经检索,未发现与本发明相同或相似的技术方案。
技术实现要素:
[0004]
本发明目的是:提供一种融合磁导引、通信、定位的移动机器人导航系统,以解决现有技术中agv导航方式适应性差、以及通信方式不足的问题。
[0005]
本发明的技术方案是:一种融合磁导引、通信、定位的移动机器人导航系统,用于与安装有磁传感器的移动机器人agv配合工作,包括磁导引系统、载波通信系统以及定位系统;所述磁导引系统由电源及通过电源供电并形成行驶路径的导引线组成;所述载波通信系统包括电源端通信系统及agv控制端通信系统,通过载波通信实现通信信号的双向传输;所述定位系统由沿行驶路径的特定拓扑导引线及安装在移动机器人agv内的磁传感器构成。
[0006]
优选的,所述电源端通信系统及所述agv控制端通信系统均包括耦合载波电路及调制解调器。
[0007]
优选的,所述电源端通信系统中,所述耦合载波电路采用电容与电感串联而成,并与导引线端部起点连接,所述调制解调器并联设置在电感两端,所述电感两端还并联设置有功率放大器及通信接口。
[0008]
优选的,所述agv控制端通信系统中,还包括感应天线,所述感应天线设置在磁传感器下方,并与调制解调器连接,实现磁传感器的导引及载波通信功能。
[0009]
优选的,所述导引线沿移动机器人agv的运动方向构成不同大小的矩形,所述磁传感器根据矩形大小检测到磁场的强度不同,从而实现相应位置的识别。
[0010]
与现有技术相比,本发明的优点是:
[0011]
本发明在传统的磁传感器的磁导引基础上,增设了载波通信系统以及定位系统,其中载波通信系统,就是在导引线中,通过载波通信实现通信信号的双向传输,从而实现主控系统与移动机器人agv的通信,很好的解决了在恶劣环境下的通信难题;同时,定位系统采用将导引线排布为不同大小的矩形结构,从而在磁传感器在经过的时候,根据矩形大小检测到磁场的强度不同,识别出位置信号,取代了传统采用rfid的方式,有效的降低了成本。
附图说明
[0012]
下面结合附图及实施例对本发明作进一步描述:
[0013]
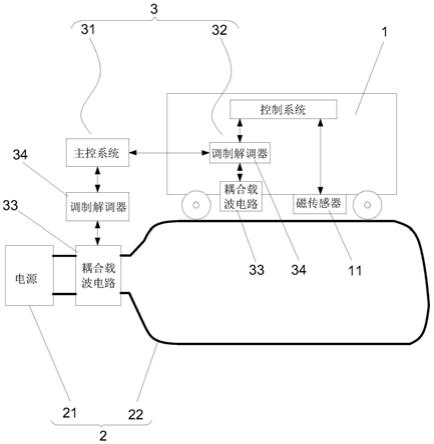
图1为本发明所述的一种融合磁导引、通信、定位的移动机器人导航系统的结构原理图;
[0014]
图2为本发明所述电源端通信系统的结构原理图;
[0015]
图3为本发明所述agv控制端通信系统中感应天线的设置结构示意图;
[0016]
图4为本发明所述导引线的局部放大图。
[0017]
其中:1、移动机器人agv;
[0018]
11、磁传感器;
[0019]
2、磁导引系统;
[0020]
21、电源,22、导引线;
[0021]
3、载波通信系统;
[0022]
31、电源端通信系统,32、agv控制端通信系统,33、耦合载波电路,34、调制解调器,35、功率放大器,36、通信接口,37、感应天线;
[0023]
331、电容,332、电感。
具体实施方式
[0024]
下面结合具体实施例,对本发明的内容做进一步的详细说明:
[0025]
如图1所示,一种融合磁导引、通信、定位的移动机器人导航系统,用于与安装有磁传感器11的移动机器人agv1配合工作,其组成包括磁导引系统2、载波通信系统3以及定位系统。
[0026]
磁导引系统2由电源21及通过电源21供电并形成行驶路径的导引线22组成;移动机器人agv1通过磁传感器11靠近导引线22,感应电磁信号实现巡线导引;该电磁导引是早期的agv导航导引方式之一,技术比较成熟,这种导引技术的优势在于原理简单,不受声光干扰,制造成本低,埋藏的金属线(即导引线22)不易损坏。其优势主要是导引电流磁场不会衰减,完全受控,长时间使用不需要维护。
[0027]
载波通信系统3包括电源端通信系统31及agv控制端通信系统32,通过载波通信实现通信信号的双向传输;电源端通信系统31及agv控制端通信系统32均包括耦合载波电路33及调制解调器34;其中,在电源端通信系统31中,结合图2所示,耦合载波电路33采用电容331与电感332串联而成,并与导引线22端部起点连接,调制解调器34并联设置在电感332两端,电感332两端还并联设置有功率放大器35及通信接口36;在agv控制端通信系统32中,结合图3所示,还包括感应天线37,感应天线37设置在磁传感器11下方,并与调制解调器34连
接,实现磁传感器11的导引及载波通信功能。
[0028]
定位系统由沿行驶路径的特定拓扑导引线22及安装在移动机器人agv1内的磁传感器11构成,如图4所示,导引线22沿移动机器人agv1的运动方向构成不同大小的矩形,磁传感器11根据矩形大小检测到磁场的强度不同,从而实现相应位置的识别定位,取代了传统采用rfid的方式,有效的降低了成本。
[0029]
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1