一种空间交会对接激光雷达扫描跟踪控制系统及方法
1.本发明涉及扫描跟踪控制技术领域,特别是涉及一种空间交会对接激光雷达扫描跟踪控制系统及方法。
背景技术:
2.在空间交会对接中,激光雷达是一种主要的测量设备。激光雷达的工作原理为:激光器发送单脉冲激光(即主波),激光打到合作目标后按原路径返回;探测器接收激光回波,测量主波和回波之间的时间差,解算出目标到雷达的直线距离。根据激光发射的方位角和俯仰角,结合直线距离,得到目标在以雷达为中心的极坐标系下的位置。
3.由于激光具有较强的方向性,光束发散角和探测器接收角均在毫弧度量级,一次脉冲激光发射探测的范围极其有限。为了实现在大范围内对目标进行扫描和捕获,进而进入稳定跟踪状态下测量目标距离和角度,必须配合方位轴和俯仰轴的运动控制。
4.现有采用直流电机、永磁同步电机等控制方式对于激光雷达的方位、俯仰两轴运动控制。直流电机和永磁同步电机可以提供优越的转矩和响应特性,但控制上也较为复杂。直流电机和永磁同步电机要实现高精度的运动控制,一般采用三环控制,内层电流环要求使用专用的电流传感器实现电流闭环,系统体积、重量、复杂度都相应增加。直流电机存在电刷,换向过程中可能产生电火花,同时电刷会有磨损,产生多余物,系统寿命也会受到限制,可靠性不满足空间应用的需求。永磁同步电机无电刷的问题,但控制更为复杂。永磁同步电机一般为三相,需要对两相电流进行实时测量,并经过较为复杂的变换和解算,对dsp的运算能力要求更高。直流电机和永磁同步电机运动过程中,加速度不同,输出转矩的变化较大,对电源的影响也较大。因此现有两轴控制系统控制较为复杂、成本高、重量大,存在空间环境适应性问题。
技术实现要素:
5.基于此,本发明的目的是提供一种空间交会对接激光雷达扫描跟踪控制系统及方法,在满足精度要求的情况下,降低系统成本和重量、提高了系统可靠性。
6.为实现上述目的,本发明提供了一种空间交会对接激光雷达扫描跟踪控制系统,所述系统包括:
7.角度传感器,用于检测方位轴角度值和俯仰轴角度值;
8.四象限探测器,用于根据回波在各象限的能量确定二维脱靶量;
9.dsp闭环控制器,分别与所述角度传感器和所述四象限探测器连接,用于根据所述方位轴角度值、所述俯仰轴角度值和所述二维脱靶量确定两个步进电机的运动方向和分频系数;两个步进电机的运动方向包括:俯仰电机的运动方向和方位电机的运动方向;两个步进电机的分频系数包括俯仰电机的分频系数和方位电机的分频系数;
10.spwm细分驱动控制器,与所述dsp闭环控制器连接,用于根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波;
11.4个双极性h桥功率驱动电路,分别与所述spwm细分驱动控制器、两个步进电机连接,用于将所述第一spwm波和所述第二spwm波进行放大后分别控制两个步进电机,以使两个步进电机分别驱动方位轴和仰俯轴转动,进而带动四象限探测器扫描跟踪;所述两个步进电机分别为方位电机和俯仰电机。
12.可选地,所述spwm细分驱动控制器包括:
13.系统时钟,用于产生时钟信号;
14.俯仰轴步进脉冲产生器,分别与所述dsp闭环控制器和所述系统时钟连接,用于根据所述俯仰电机的分频系数和所述时钟信号确定第一步进脉冲;
15.第一计数器,分别与所述dsp闭环控制器、所述系统时钟和所述俯仰轴步进脉冲产生器连接,用于根据所述俯仰电机的运动方向和所述第一步进脉冲进行计数,获得第一计数值;
16.第一查表模块,与所述第一计数器连接,用于根据所述第一计数值通过查找俯仰轴sin表确定俯仰轴sin值;
17.第二查表模块,与所述第一计数器连接,用于根据所述第一计数值通过查找俯仰轴cos表确定俯仰轴cos值;
18.方位轴步进脉冲产生器,分别与所述dsp闭环控制器和所述系统时钟连接,用于根据所述方位电机的分频系数和所述时钟信号确定第二步进脉冲;
19.第二计数器,分别与所述dsp闭环控制器、所述系统时钟和所述方位轴步进脉冲产生器连接,用于根据所述方位电机的运动方向和所述第二步进脉冲进行计数,获得第二计数值;
20.第三查表模块,与所述第二计数器连接,用于根据所述第二计数值通过查找方位轴sin表确定方位轴sin值;
21.第四查表模块,与所述第二计数器连接,用于根据所述第二计数值通过查找方位轴cos表确定方位轴cos值;
22.载波计数器,与所述系统时钟连接,用于对时钟信号进行载波计数,获得载波值;
23.平移修正模块,分别与所述第一查表模块、所述第二查表模块、所述第三查表模块和所述第四查表模块连接,用于对所述俯仰轴sin值、所述俯仰轴cos值、所述方位轴sin值和所述方位轴cos值进行平移修正;
24.第一比较器,分别与所述载波计数器和所述平移修正模块连接,用于将所述载波值与修正后的俯仰轴sin值进行比较,获得俯仰电机a相spwm波;
25.第二比较器,分别与所述载波计数器和所述平移修正模块连接,用于将所述载波值与修正后的俯仰轴cos值进行比较,获得俯仰电机b相spwm波;所述第一spwm波包括俯仰电机a相spwm波和俯仰电机b相spwm波;
26.第三比较器,分别与所述载波计数器和所述平移修正模块连接,用于将所述载波值与修正后的方位轴sin值进行比较,获得方位电机a相spwm波;
27.第四比较器,分别与所述载波计数器和所述平移修正模块连接,用于将所述载波值与修正后的方位轴cos值进行比较,获得方位电机b相spwm波;所述第二spwm波包括方位电机a相spwm波和方位电机b相spwm波。
28.可选地,4个双极性h桥功率驱动电路分别为:
29.方位电机a相绕组驱动电路、方位电机b相绕组驱动电路、俯仰电机a相绕组驱动电路和俯仰电机b相绕组驱动电路;
30.所述方位电机a相绕组驱动电路包括第一开关管、第二开关管、第三开关管、第四开关管和方位电机a相绕组;所述第一开关管的第一端、所述第三开关管的第一端分别与驱动电源正极连接,所述第一开关管的第三端分别与第二开关管的第一端和所述方位电机a相绕组的一端连接,所述方位电机a相绕组的另一端分别与所述第三开关管的第三端和所述第四开关管的第一端连接,所述第四开关管的第三端与所述第二开关管的第三端分别与驱动电源负极连接,所述第一开关管的第二端和所述第四开关管的第二端分别与所述第一比较器输出的方位电机a相spwm波连接,所述第二开关管的第二端和所述第三开关管的第二端分别与所述第一比较器输出的方位电机a相spwm波取反的信号连接;
31.所述方位电机b相绕组驱动电路包括第五开关管、第六开关管、第七开关管、第八开关管和方位电机b相绕组;所述第五开关管的第一端、所述第七开关管的第一端分别与驱动电源正极连接,所述第五开关管的第三端分别与第六开关管的第一端和所述方位电机b相绕组的一端连接,所述方位电机b相绕组的另一端分别与所述第七开关管的第三端和所述第八开关管的第一端连接,所述第八开关管的第三端与所述第六开关管的第三端分别与驱动电源负极连接,所述第五开关管的第二端和所述第八开关管的第二端分别与所述第二比较器输出的方位电机b相spwm波连接,所述第六开关管的第二端和所述第七开关管的第二端分别与所述第二比较器输出的方位电机b相spwm波取反的信号连接;
32.所述俯仰电机a相绕组驱动电路包括第九开关管、第十开关管、第十一开关管、第十二开关管和俯仰电机a相绕组;所述第九开关管的第一端、所述第十一开关管的第一端分别与驱动电源正极连接,所述第九开关管的第三端分别与第二十开关管的第一端和所述俯仰电机a相绕组的一端连接,所述俯仰电机a相绕组的另一端分别与所述第十一开关管的第三端和所述第十二开关管的第一端连接,所述第十二开关管的第三端与所述第十开关管的第三端分别与驱动电源负极连接,所述第九开关管的第二端和所述第十二开关管的第二端分别与所述第三比较器输出的仰俯电机a相spwm波连接,所述第十开关管的第二端和所述第十一开关管的第二端分别与所述第三比较器输出的仰俯电机a相spwm波取反的信号连接;
33.所述俯仰电机b相绕组驱动电路包括第十三开关管、第十四开关管、第十五开关管、第十六开关管和俯仰电机b相绕组;所述第十三开关管的第一端、所述第十五开关管的第一端分别与驱动电源正极连接,所述第十三开关管的第三端分别与第十四开关管的第一端和所述俯仰电机b相绕组的一端连接,所述俯仰电机b相绕组的另一端分别与所述第十五开关管的第三端和所述第十六开关管的第一端连接,所述第十六开关管的第三端与所述第十四开关管的第三端分别与驱动电源负极连接,所述第十三开关管的第二端和所述第十六开关管的第二端分别与所述第四比较器输出的仰俯电机b相spwm波连接,所述第十四开关管的第二端和所述第十五开关管的第二端分别与所述第四比较器输出的仰俯电机b相spwm波取反的信号连接。
34.可选地,所述系统还包括:
35.光电隔离电路,设置在所述spwm细分驱动控制器和4个双极性h桥功率驱动电路之间,用于将所述第一spwm波和所述第二spwm波进行光耦隔离。
36.可选地,所述系统还包括:
37.8个功率驱动芯片,设置在所述光电隔离电路和4个双极性h桥功率驱动电路之间,用于分别驱动所述方位电机a相绕组驱动电路、所述方位电机b相绕组驱动电路、所述俯仰电机a相绕组驱动电路和所述俯仰电机b相绕组驱动电路。
38.可选地,所述功率驱动芯片的型号为ir2110。
39.可选地,当本发明中第一开关管、第二开关管、第三开关管、第四开关管、第五开关管、第六开关管、第七开关管、第八开关管、第九开关管、第十开关管、第十一开关管、第十二开关管、第十三开关管、第十四开关管、第十五开关管和第十六开关管均为mos管时,第一端为漏极,第二端为栅极,第三端为源极。
40.本发明还提供一种空间交会对接激光雷达扫描跟踪控制方法,所述方法包括:
41.利用角度传感获取方位轴角度值和俯仰轴角度值;
42.根据回波在各象限的能量确定二维脱靶量;
43.根据所述方位轴角度值、所述俯仰轴角度值和所述二维脱靶量确定两个步进电机的运动方向和分频系数;两个步进电机的运动方向包括:俯仰电机的运动方向和方位电机的运动方向;两个步进电机的分频系数包括俯仰电机的分频系数和方位电机的分频系数;
44.根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波;
45.将所述第一spwm波和所述第二spwm波进行放大后分别控制两个步进电机,以使两个步进电机分别驱动方位轴和仰俯轴转动,进而带动四象限探测器扫描跟踪;所述两个步进电机分别为方位电机和俯仰电机。
46.可选地,所述根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波,具体包括:
47.获取时钟信号;
48.根据所述俯仰电机的分频系数和所述时钟信号确定第一步进脉冲;
49.根据所述俯仰电机的运动方向和所述第一步进脉冲进行计数,获得第一计数值;
50.根据所述第一计数值通过查找俯仰轴sin表确定俯仰轴sin值;
51.根据所述第一计数值通过查找俯仰轴cos表确定俯仰轴cos值;
52.对时钟信号进行载波计数,获得载波值;
53.根据所述方位电机的分频系数和所述时钟信号确定第二步进脉冲;
54.根据所述方位电机的运动方向和所述第二步进脉冲进行计数,获得第二计数值;
55.根据所述第二计数值通过查找方位轴sin表确定方位轴sin值;
56.根据所述第二计数值通过查找方位轴cos表确定方位轴cos值;
57.对所述俯仰轴sin值、所述俯仰轴cos值、所述方位轴sin值和所述方位轴cos值进行平移修正;
58.将所述载波值与修正后的俯仰轴sin值进行比较,获得俯仰电机a相spwm波;
59.将所述载波值与修正后的俯仰轴cos值进行比较,获得俯仰电机b相spwm波;所述第一spwm波包括俯仰电机a相spwm波和俯仰电机b相spwm波;
60.将所述载波值与修正后的方位轴sin值进行比较,获得方位电机a相spwm波;
61.将所述载波值与修正后的方位轴cos值进行比较,获得方位电机b相spwm波;所述第二spwm波包括方位电机a相spwm波和方位电机b相spwm波。
62.根据本发明提供的具体实施例,本发明公开了以下技术效果:
63.本发明基于步进电机高精度spwm细分驱动闭环系统,以单片dsp构建闭环控制器,以角度传感器和四象限探测器脱靶量作为双反馈,同时实现两轴步进电机的高速扫描控制和稳定跟踪控制。以单片fpga实现spwm细分驱动控制器,在不增加额外控制芯片和传感器的情况下,实现了要求的控制功能和性能指标,使得电路和结构都得到了精简,提高了系统可靠性,满足空间交会对接应用的需求。
附图说明
64.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
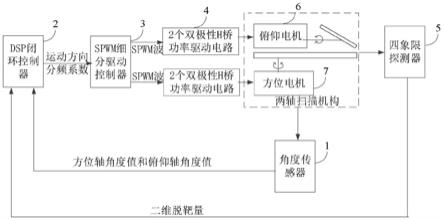
65.图1为本发明实施例空间交会对接激光雷达扫描跟踪控制系统结构图;
66.图2为本发明实施例两相混合式步进电机步距角细分原理;
67.图3为本发明实施例spwm细分驱动控制器结构图;
68.图4为本发明实施例方位电机a相绕组驱动电路结构图;
69.其中,1、角度传感器,2、dsp闭环控制器,3、spwm细分驱动控制器,4、双极性h桥功率驱动电路,5、四象限探测器,6、俯仰电机,7、方位电机。
具体实施方式
70.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
71.本发明的目的是提供一种空间交会对接激光雷达扫描跟踪控制系统及方法,在满足精度要求的情况下,降低系统成本和重量、提高了系统可靠性。
72.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
73.图1为本发明实施例空间交会对接激光雷达扫描跟踪控制系统结构图,如图1所示,本发明公开一种空间交会对接激光雷达扫描跟踪控制系统,所述系统包括:角度传感器1、四象限探测器5、dsp闭环控制器2、spwm细分驱动控制器3和4个双极性h桥功率驱动电路4;所述dsp闭环控制器2分别与所述角度传感器1和所述四象限探测器5连接,所述spwm细分驱动控制器3与所述dsp闭环控制器2连接,所述4个双极性h桥功率驱动电路4分别与所述spwm细分驱动控制器3和两个步进电机连接。
74.所述角度传感器1用于检测方位轴角度值和俯仰轴角度值;所述四象限探测器5用于根据回波在各象限的能量确定二维脱靶量;所述dsp闭环控制器2用于根据所述方位轴角度值、所述俯仰轴角度值和所述二维脱靶量确定两个步进电机的运动方向和分频系数;两个步进电机的运动方向包括:俯仰电机6的运动方向和方位电机7的运动方向;两个步进电机的分频系数包括俯仰电机6的分频系数和方位电机7的分频系数;所述spwm细分驱动控制
器3用于根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波;所述4个双极性h桥功率驱动电路4用于将所述第一spwm波和所述第二spwm波进行放大后分别控制两个步进电机,以使两个步进电机分别驱动方位轴和仰俯轴转动,进而带动四象限探测器5扫描跟踪;所述两个步进电机分别为方位电机7和俯仰电机6。
75.本发明中的闭环控制器是基于dsp进行设计的,dsp为航天级高可靠产品,结合控制算法完成闭环控制功能。在扫描状态下,根据角度传感器1检测的方位轴角度值和俯仰轴角度值进行闭环,完成大范围高速扫描运动的控制。在跟踪状态下,根据所述四象限探测器5输出的二维脱靶量进行闭环,实现稳定跟踪控制。dsp输出两轴步进电机的运动方向和分频系数作为控制量。分频系数决定步进电机的运动速度。
76.对spwm细分驱动控制器3的工作原理说明如下:
77.空间交会对接激光雷达选用的步进电机为两相混合式步进电机。混合式步进电机具有运行频率高、动态力矩大、波动小、运行平稳、低噪声、定位精度和分辨率高等优点。两相混合式步进电机有两相绕组,空间上相差90
°
安置,在两相绕组中按一定的时序通过相电流,产生连续变化的转矩,驱动转子转动。
78.在不考虑细分的驱动电路中,相电流工作于开关状态,绕组中的电流大小为0或正负额定值。设两相绕组分别为a相和b相,a相绕组通过正向额定电流产生的转矩为t
a+
,负向额定电流转矩为t
a
‑
,b相绕组转矩为t
b+
和t
b
‑
。a、b相绕组转矩相等。以单四拍工作方式为例,转矩变化如图2(a)所示,转子每拍运动1/4个齿距,转矩恒定。
79.对步进电机步距角进行细分是通过改变绕组相电流的方法来实现。在细分驱动电路中,电机相电流不再工作于开关状态,而是从0到额定值的连续变化。设两相电流分别为i
a
,i
b
,合成电流矢量为i
m
,如图2(b)所示。满足如下关系:
80.i
a
=i
m sinα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
81.i
b
=i
m cosα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
82.α为电流矢量方向角。电流矢量方向每变化90
°
,电机转子转过1个步距角(1/4齿距)。若每次电流矢量方向角变化90
°
/n,则转子相应转过1个步距角的1/n,实现对步进电机步距角的n次细分。通过上式可以看出,当a、b两相绕组电流以等幅值,相位差为90
°
的正弦波规律变化时,转矩保持恒力矩均匀旋转。细分后的电机转矩变化如图2(c)所示。
83.spwm波是正弦脉宽调制波的缩写,spwm的产生通过fpga实现,对基于fpga的步进电机驱动spwm波的原理和生成方法的说明如下。
84.spwm波是脉宽调制波形的一种,其特点为占空比的变化规律为正弦函数。spwm通过h桥功率驱动电路后,占空比的大小转换为通过电机绕组的平均电流的大小。分别产生以相位差为90
°
的正弦规律调制的两路spwm波,经双极性h桥功率驱动电路4后接入两相步进电机的a、b两相,即可实现细分驱动。
85.激光雷达设计中,方位角选用的步进电机转子齿数为200,齿距1.8
°
,步距角0.45
°
,俯仰角步进电机齿数50,齿距7.2
°
,步距角1.8
°
。对方位角步进电机一个步距角进行512细分,俯仰电机6一个步距角进行1024细分,fpga产生spwm的过程如图3所示,本发明所述spwm细分驱动控制器3包括:系统时钟、俯仰轴步进脉冲产生器、第一计数器、第一查表模块、第二查表模块、方位轴步进脉冲产生器、第二计数器、第三查表模块、第四查表模块、载波计数器、平移修正模块、第一比较器、第二比较器、第三比较器和第四比较器;所述俯仰轴
步进脉冲产生器分别与所述dsp闭环控制器2和所述系统时钟连接,所述第一计数器分别与所述dsp闭环控制器2、所述系统时钟和所述俯仰轴步进脉冲产生器连接,所述第一查表模块与所述第一计数器连接,所述第二查表模块与所述第一计数器连接,所述方位轴步进脉冲产生器分别与所述dsp闭环控制器2和所述系统时钟连接,所述第二计数器分别与所述dsp闭环控制器2、所述系统时钟和所述方位轴步进脉冲产生器连接,所述第三查表模块与所述第二计数器连接,所述第四查表模块与所述第二计数器连接,所述载波计数器与所述系统时钟连接,所述平移修正模块分别与所述第一查表模块、所述第二查表模块、所述第三查表模块和第四查表模块所述连接,所述第一比较器分别与所述载波计数器和所平移修正模块连接,所述第二比较器分别与所述载波计数器和所述平移修正模块连接,所述第三比较器分别与所述载波计数器和所述平移修正模块连接,所述第四比较器分别与所述载波计数器和所述平移修正模块连接。
86.系统时钟用于产生时钟信号。俯仰轴步进脉冲产生器用于根据所述俯仰电机6的分频系数和所述时钟信号确定第一步进脉冲;俯仰电机6的分频系数决定第一步进脉冲频率,即决定俯仰电机6速度。
87.第一计数器用于根据所述俯仰电机6的运动方向和所述第一步进脉冲进行计数,获得第一计数值;具体的,当所述俯仰电机6的运动方向为正时,则进行所述第一步进脉冲加计数,当所述俯仰电机6的运动方向为负时,则进行所述第一步进脉冲减计数,计数器周期为步进电机一个齿距的细分数,对于俯仰轴步进电机,计数周期为1024
×
4。
88.所述第一查表模块用于根据所述第一计数值通过查找俯仰轴sin表确定俯仰轴sin值;所述第二查表模块用于根据所述第一计数值通过查找俯仰轴cos表确定俯仰轴cos值;所述第三查表模块用于根据所述第二计数值通过查找方位轴sin表确定方位轴sin值;所述第四查表模块用于根据所述第二计数值通过查找方位轴cos表确定方位轴cos值。本发明根据计数值查表获取相应的sin值(即正弦值)和cos值(即余弦值),正弦型函数只需要建立1/4周期的查找表即可计算整个周期的值。对于方位轴,查找表大小为512
×
12bit;对于俯仰轴,查找表大小为1024
×
12bit。表输出均为12bit位宽。设计载波周期为0~4095(12bit),sin、cos函数幅值设计为1/2载波周期的3/4(1536)。
89.所述方位轴步进脉冲产生器用于根据所述方位电机7的分频系数和所述时钟信号确定第二步进脉冲;方位电机7的分频系数决定第二步进脉冲频率,即决定方位电机7速度。
90.所述第二计数器用于根据所述方位电机7的运动方向和所述第二步进脉冲进行计数,获得第二计数值;具体的,当所述方位电机7的运动方向为正时,则进行所述第二步进脉冲加计数,当所述方位电机7的运动方向为负时,则进行所述第二步进脉冲减计数,计数器周期为步进电机一个齿距的细分数,对于方位轴电机,计数周期为512
×
4。
91.所述载波计数器用于对时钟信号进行载波计数,获得载波值;所述平移修正模块用于对所述俯仰轴sin值、所述俯仰轴cos值、所述方位轴sin值和所述方位轴cos值进行平移修正;所述第一比较器用于将所述载波值与修正后的俯仰轴sin值进行比较,获得俯仰电机a相spwm波;所述第二比较器用于将所述载波值与修正后的俯仰轴cos值进行比较,获得俯仰电机b相spwm波;所述第一spwm波包括俯仰电机a相spwm波和俯仰电机b相spwm波;所述第三比较器用于将所述载波值与修正后的方位轴sin值进行比较,获得方位电机a相spwm波;所述第四比较器用于将所述载波值与修正后的方位轴cos值进行比较,获得方位电机b
相spwm波;所述第二spwm波包括方位电机a相spwm波和方位电机b相spwm波。
92.本发明中的spwm细分驱动控制器3选用航天级高可靠反熔丝fpga产品进行设计,对空间辐照和单粒子效应具有较强的免疫力,适应空间交会对接的需求。fpga主要实现步进电机细分驱动控制,根据dsp输入的方向参数和步进电机分频系数,生成相应的俯仰电机a相spwm波、俯仰电机b相spwm波、方位电机a相spwm波和方位电机b相spwm波,即所述第一spwm波和所述第二spwm波。
93.通过上述方法产生spwm波驱动步进电机运动,电机转速v(单位
°
/s)与dsp输入的分频系数c的关系如下:
[0094][0095]
式中,v为电机转速,c为分频系数,d为电机步距角(1/4齿距,单位
°
),n为细分数,f为系统时钟频率(单位hz)。
[0096]
作为一种实施方式,本发明所述spwm细分驱动控制器3还包括:平移修正模块,分别与所述第一查表模块、所述第二查表模块、所述第三查表模块、所述第四查表模块、所述第一比较器、所述第二比较器、所述第三比较器和所述第四比较器连接,用于对所述俯仰轴sin值、所述俯仰轴cos值所述方位轴sin值和所述方位轴cos值进行平移修正,当查表值为0时,对应占空比50%,即1/2载波周期(2048)。修正后的sin、cos值的变化范围为2048
±
1536。基于系统时钟进行0~4095载波计数,与修正后的sin和cos值比较后输出载波周期内高电平占比按正弦/余弦规律变化的方波,即相位差为90
°
的两相spwm波驱动信号。
[0097]
作为一种实施方式,本发明4个双极性h桥功率驱动电路4分别为:方位电机a相绕组驱动电路、方位电机b相绕组驱动电路、俯仰电机a相绕组驱动电路和俯仰电机b相绕组驱动电路。方位电机b相绕组驱动电路、俯仰电机a相绕组驱动电路和俯仰电机b相绕组驱动电路的电路结构图与方位电机a相绕组驱动电路电路结构图相同,在此不再一一给出附图。
[0098]
以方位电机a相绕组为例,如图4所示,所述方位电机a相绕组驱动电路包括第一开关管q1、第二开关管q2、第三开关管q3、第四开关管q4和方位电机a相绕组l1;所述第一开关管q1的第一端、所述第三开关管q3的第一端分别与驱动电源正极连接,所述第一开关管q1的第三端分别与第二开关q2管的第一端和所述方位电机a相绕组l1的一端连接,所述方位电机a相绕组l1的另一端分别与所述第三开关管q3的第三端和所述第四开关管q4的第一端连接,所述第四开关管q4的第三端与所述第二开关管q2的第三端分别与驱动电源负极连接,所述第一开关管q1的第二端和所述第四开关管q4的第二端分别与所述第一比较器输出的方位电机a相spwm波连接,所述第二开关管q2的第二端和所述第三开关管q3的第二端分别与所述第一比较器输出的方位电机a相spwm波取反的信号连接。当本发明中第一开关管q1、第二开关管q2、第三开关管q3和第四开关管q4均为mos管,第一端为漏极,第二端为栅极,第三端为源极。
[0099]
第一开关管q1、第四开关管q4为一组,第二开关管q2、第三开关管q3为一组。同一组mos管输入相同的波形,同时导通或截止。不同组mos管的输入波形电导通,平取反,当一组mos管导通时,另一组mos管截止。
[0100]
在一个pwm周期中,当输入的波形u1为高电平时,第一开关管q1、第四开关管q4导通,此时u2为低电平,第二开关管q2、第三开关管q3截止,电机绕组承受a+到a
‑
的正向电压;
当u1为低电平时,第一开关管q1、第四开关管q4截止,此时u2为高电平,第二开关管q2、第三开关管q3导通,电机绕组承受a
‑
到a+的反向电压。
[0101]
一个pwm周期中,电机绕组上的平均电压ua与占空比的关系如下:
[0102][0103]
其中,u
s
为驱动电路供电电压,t为pwm周期,t1为高电平时间,r为占空比。可以看出,占空比为50%时,电机绕组上的平均电压为0。
[0104]
根据前述基于fpga的spwm波产生过程,得到占空比的变化规律如下:
[0105][0106]
带入上式,得到电机绕组平均电压的变化规律为:
[0107]
u
a
=p
·
u
s
·
sinα
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0108]
式中,p为正弦型函数的幅值相对于1/2周期的占比,实际设计中选取p为0.75,可以看出电机绕组上的平均电压和电流按正弦规律变化。
[0109]
本发明所述方位电机b相绕组驱动电路包括第五开关管、第六开关管、第七开关管、第八开关管和方位电机b相绕组;所述第五开关管的第一端、所述第七开关管的第一端分别与驱动电源正极连接,所述第五开关管的第三端分别与第六开关管的第一端和所述方位电机b相绕组的一端连接,所述方位电机b相绕组的另一端分别与所述第七开关管的第三端和所述第八开关管的第一端连接,所述第八开关管的第三端与所述第六开关管的第三端分别与驱动电源负极连接,所述第五开关管的第二端和所述第八开关管的第二端分别与所述第二比较器输出的方位电机b相spwm波连接,所述第六开关管的第二端和所述第七开关管的第二端分别与所述第二比较器输出的方位电机b相spwm波取反的信号连接。
[0110]
本发明所述俯仰电机a相绕组驱动电路包括第九开关管、第十开关管、第十一开关管、第十二开关管和俯仰电机a相绕组;所述第九开关管的第一端、所述第十一开关管的第一端分别与驱动电源正极连接,所述第九开关管的第三端分别与第二十开关管的第一端和所述俯仰电机a相绕组的一端连接,所述俯仰电机a相绕组的另一端分别与所述第十一开关管的第三端和所述第十二开关管的第一端连接,所述第十二开关管的第三端与所述第十开关管的第三端分别与驱动电源负极连接,所述第九开关管的第二端和所述第十二开关管的第二端分别与所述第三比较器输出的仰俯电机a相spwm波连接,所述第十开关管的第二端和所述第十一开关管的第二端分别与所述第三比较器输出的仰俯电机a相spwm波取反的信号连接。
[0111]
本发明所述俯仰电机b相绕组驱动电路包括第十三开关管、第十四开关管、第十五开关管、第十六开关管和俯仰电机b相绕组;所述第十三开关管的第一端、所述第十五开关管的第一端分别与驱动电源正极连接,所述第十三开关管的第三端分别与第十四开关管的第一端和所述俯仰电机b相绕组的一端连接,所述俯仰电机b相绕组的另一端分别与所述第十五开关管的第三端和所述第十六开关管的第一端连接,所述第十六开关管的第三端与所述第十四开关管的第三端分别与驱动电源负极连接,所述第十三开关管的第二端和所述第十六开关管的第二端分别与所述第四比较器输出的仰俯电机b相spwm波连接,所述第十四
开关管的第二端和所述第十五开关管的第二端分别与所述第四比较器输出的仰俯电机b相spwm波取反的信号连接。
[0112]
作为一种实施方式,本发明所述系统还包括:光电隔离电路,设置在所述spwm细分驱动控制器3和4个双极性h桥功率驱动电路4之间,用于将所述第一spwm波和所述第二spwm波进行光耦隔离。
[0113]
作为一种实施方式,本发明所述系统还包括:8个功率驱动芯片,设置在所述光电隔离电路和4个双极性h桥功率驱动电路4之间,用于分别驱动所述方位电机a相绕组驱动电路、所述方位电机b相绕组驱动电路、所述俯仰电机a相绕组驱动电路和所述俯仰电机b相绕组驱动电路。
[0114]
在激光雷达设计中,spwm细分驱动控制器3产生的spwm波经过所述光电隔离电路进行光耦隔离后,输入功率驱动芯片ir2110来驱动双极性h桥功率驱动电路4。ir2110具有高速开关频率,满足数十hz到数百khz范围的应用需求,同时还具有两个输入输出通道,以及开通慢、关断快的死区保护功能,防止桥臂直通的优点,一个ir2110控制h桥同侧上下两个桥臂的mos管,因此每相绕组驱动电路需要两个ir2110。另外,h桥的功率mos管选用irhnj67230,具有空间辐照和单粒子效应增强的特性,连续工作电流达到10a以上。
[0115]
本发明还提供一种空间交会对接激光雷达扫描跟踪控制方法,所述方法包括:
[0116]
步骤s10:利用角度传感获取方位轴角度值和俯仰轴角度值。
[0117]
步骤s20:根据回波在各象限的能量确定二维脱靶量。
[0118]
步骤s30:根据所述方位轴角度值、所述俯仰轴角度值和所述二维脱靶量确定两个步进电机的运动方向和分频系数;两个步进电机的运动方向包括:俯仰电机的运动方向和方位电机的运动方向;两个步进电机的分频系数包括俯仰电机的分频系数和方位电机的分频系数。
[0119]
步骤s40:根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波。
[0120]
步骤s50:将所述第一spwm波和所述第二spwm波进行放大后分别控制两个步进电机,以使两个步进电机分别驱动方位轴和仰俯轴转动,进而带动四象限探测器5扫描跟踪;所述两个步进电机分别为方位电机和俯仰电机。
[0121]
作为一种实施方式,本发明所述根据所述两个步进电机的运动方向和分频系数确定第一spwm波和第二spwm波,具体包括:
[0122]
步骤s401:获取时钟信号。
[0123]
步骤s402:根据所述俯仰电机的分频系数和所述时钟信号确定第一步进脉冲。
[0124]
步骤s403:根据所述俯仰电机的运动方向和所述第一步进脉冲进行计数,获得第一计数值。
[0125]
步骤s404:根据所述第一计数值通过查找方位轴sin表确定方位轴sin值。
[0126]
步骤s405:根据所述第一计数值通过查找方位轴cos表确定俯仰轴cos值。
[0127]
步骤s406:对时钟信号进行载波计数,获得载波值。
[0128]
步骤s407:根据所述方位电机的分频系数和所述时钟信号确定第二步进脉冲。
[0129]
步骤s408:根据所述方位电机的运动方向和所述第二步进脉冲进行计数,获得第二计数值。
[0130]
步骤s409:根据所述第二计数值通过查找方位轴sin表确定方位轴sin值。
[0131]
步骤s410:根据所述第二计数值通过查找方位轴cos表确定方位轴cos值。
[0132]
步骤s411:对所述俯仰轴sin值、所述俯仰轴cos值、所述方位轴sin值和所述方位轴cos值进行平移修正。
[0133]
步骤s412:将所述载波值与修正后的俯仰轴sin值进行比较,获得俯仰电机a相spwm波。
[0134]
步骤s413:将所述载波值与修正后的俯仰轴cos值进行比较,获得俯仰电机b相spwm波;所述第一spwm波包括俯仰电机a相spwm波和俯仰电机b相spwm波。
[0135]
步骤s414:将所述载波值与修正后的方位轴sin值进行比较,获得方位电机a相spwm波。
[0136]
步骤s415:将所述载波值与修正后的方位轴cos值进行比较,获得方位电机b相spwm波;所述第二spwm波包括方位电机a相spwm波和方位电机b相spwm波。
[0137]
本发明的优点包括:
[0138]
1、系统结构紧凑、集成度高,主要包括以下两方面。
[0139]
(1)利用单片fpga配合外围h桥驱动电路,即可实现激光雷达两轴步进电机的细分驱动控制。fpga为激光雷达电控系统中的核心芯片之一,实现dsp外围接口扩展和逻辑控制等功能。利用fpga根据dsp的输入分频系数和方向信息,产生两轴步进电机运动所需的spwm波,不需要额外增加专用的电机驱动芯片或模块,提高了系统的集成度和可靠性,也有助于降低系统重量。
[0140]
(2)基于步进电机高精度细分驱动建立闭环控制系统,以单片dsp作为控制器,以角度传感器和四象限探测器脱靶量作为双反馈,同时实现两轴步进电机的高速扫描控制和稳定跟踪控制。dsp为激光雷达的控制核心,除了实现电机控制之外,还实现雷达系统控制和接口通讯等功能。在不增加额外控制芯片和传感器的情况下,实现了要求的控制功能和性能指标,电路和结构都得到了精简。
[0141]
2、电机输出转矩稳定,速度可调范围大,细分精度高且细分精度可控。在高速扫描和稳定跟踪过程中,加速度变化较大,步进电机输出转矩基本保持稳定,使电源的输出功率保持基本恒定,减小了对电源的影响。采用基于spwm波的步进电机细分驱动控制方法,可根据需要设计细分步数,实现要求的细分精度,在最高转速和最小步距角之间进行折中。实际设计中,激光雷达俯仰电机细分后步距角约为0.0018
°
,方位电机细分后步距角约为0.0009
°
,俯仰轴扫描过程中最高转速达到1000
°
/s以上。
[0142]
3、符合空间交会对接的应用需求。步进电机细分驱动闭环控制系统中所用dsp、fpga、双极性h桥功率驱动电路等,均采用航天级高可靠产品,在dsp软件和fpga逻辑设计中加强了可靠性和冗余设计,具有较强的空间环境适应性。系统结构和电路紧凑、集成度高,体积和重量满足满足对航天载荷的限制条件。
[0143]
本发明说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0144]
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本发明说明书
内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1