一种高超声速滑翔飞行器下压段能量管理方法
1.本发明提供一种高超声速滑翔飞行器下压段能量管理方法,它是一种高超声速滑翔飞行器在下压段进行大范围减速并到达预定位置的方法,适用于临近空间高超声速飞行器,属于航空航天;制导与控制技术;轨迹规划领域。
背景技术:
2.下压段是高超声速飞行器在飞行过程中的最后阶段,由于飞行器在下压段飞行之前刚刚结束了在大气层内的高空高速长时间滑翔飞行,因此飞行器在下压段开始时具有较高飞行高度和速度。下压段的目的是使飞行器成功命中目标并且满足各种复杂的过程约束和严格的终端约束,其中终端速度约束是飞行器完成飞行任务的重要保证,因此飞行器在下压段飞行时首先需要进行能量管理以大幅降低飞行速度。
3.高超声速滑翔飞行器不受推力作用,其速度变化与飞行轨迹密切相关,因此其能量管理问题可视为一轨迹规划问题。由于高超声速飞行器在飞行过程中受到热流、动压、过载等诸多严格的约束条件,因此该类型飞行器的轨迹规划难度很大,一般将轨迹规划问题转化为最优控制问题,使用数值优化软件包进行求解,这种方法得到的飞行轨迹具有最优性,但是数值求解时间长、效率差,并且缺少飞行力学原理的直观解释,导致该方法在工程应用领域认可度较低。因此研究通用性强、便捷的下压段能量管理方法成为各国临近空间高超声速飞行器领域研究的重点和难点问题。
4.综上所述,本发明为解决现有高超声速飞行器下压段能量管理难题,通过理论分析确定弹道模式,根据解析推导确定飞行器控制序列,通过数值积分得到标准轨迹,在跟踪标称轨迹的同时进行速度控制从而实现能量管理,具有一定独创性。
技术实现要素:
5.(一)本发明的目的
6.本发明的目的是为了解决上述问题,提出一种高超声速滑翔飞行器下压段能量管理方法,根据飞行力学原理预先设定弹道模式,通过解析推导确定飞行器的攻角、倾侧角控制序列,通过数值积分得到飞行轨迹,在跟踪标称轨迹的同时进行速度控制,以解决现有技术存在的求解效率低、可解释性差等问题,提高飞行器的下压效率。
7.(二)技术方案
8.本发明一种高超声速滑翔飞行器下压段能量管理方法,其具体步骤如下:
9.步骤一、模型建立及简化;
10.建立飞行器动力学模型:
[0011][0012]
其中x为目标点与飞行器质心连线在地面上的投影在正东方向上的分量,y为目标点与飞行器质心连线在地面上的投影在正北方向上的分量,z为飞行器的高度,v为飞行器的速度,γ为弹道倾角,ψ为航向角,σ为倾侧角,g为重力加速度,m为飞行器质量;其中弹道倾角γ是速度向量与当地水平面的夹角,航向角ψ是速度向量在当地水平面的投影与正北方向的夹角,顺时针方向旋转为正;l和d分别为升力和阻力,其表达式如下所示:
[0013][0014]
其中ρ(z)为大气密度,它是海拔高度z的函数;s
r
为飞行器参考面积,α为攻角,ma为马赫数,c
l
(α,ma)和c
d
(α,ma)分别为升力系数和阻力系数;
[0015]
对以上模型做出如下简化:忽略飞行器重力影响,假设飞行器升阻比为常值,大气密度按照指数规律变化(即),飞行器仅在纵向平面内运动,飞行器倾侧角瞬时反转,从而得到解析推导所使用的数学模型:
[0016][0017]
式中:ρ0为海平面处的大气密度(取值为1.225),c
l
为升力系数,c
d
为阻力系数;
[0018]
步骤二、解析推导;
[0019]
由于飞行器的阻力d正比于大气密度ρ,而大气密度ρ随高度升高指数衰减,因此飞行器在低空受到的阻力显著增大,故为使飞行器进行大幅度减速,预设弹道模式为:飞行器从初始高度俯冲至低空,再从低空爬升至期望高度并拉平弹道;
[0020]
将飞行过程分为两段:第一段从下压段起始点a处俯冲至低空c点处;第二段从c点处爬升至期望终端高度e点处;预设弹道模式如图3所示,其中a
‑
c段为第一段,c
‑
e段为第二段,b、d分别为倾侧反转点;
[0021]
根据步骤一得到的数学模型按照预设弹道模式进行理论推导,利用飞行力学原理确定飞行器的攻角、倾侧角的控制策略,根据飞行器初始状态和期望终端状态确定倾侧角第二次反转高度的迭代初值;
[0022]
步骤一中假设飞行器倾侧瞬时反转且飞行器仅在纵向平面内运动,因此倾侧角σ只能为0
°
或180
°
,即cos(σ)=
±
1;
[0023]
将(3)式中第二式与第三式相除并积分后可得:
[0024][0025]
其中,v0是初始速度,γ0为初始弹道倾角,k为常值升阻比,k=c
l
/c
d
,当σ为0
°
时取负号,σ为180
°
时取正号;
[0026]
将(3)式中第一式与第三式相除并积分可得:
[0027][0028]
对于a
‑
c段,飞行器首先以180
°
倾侧角翻身下压至b点,在b点倾侧角反转至0
°
使飞行器拉平轨迹,因此在a
‑
b段,有:
[0029][0030]
将上面公式整理可得:
[0031][0032]
由γ
c
≈γ
a
≈0,可得:
[0033][0034]
对于c
‑
e段,飞行器以倾侧角0
°
拉起至d点,再从d点倾侧反转至180
°
拉平,
[0035]
因此飞行器在c
‑
d段有:
[0036][0037]
在d
‑
e段,有:
[0038]
[0039]
将式(9)与(10)整理可得:
[0040][0041]
由于γ
e
≈γ
c
≈0,可得:
[0042][0043]
将式(8)和(12)联立可得:
[0044][0045][0046][0047]
其中v
e
、v
a
、ρ
e
、ρ
a
均为已知量,由以上式(13)、(14)、(15)可解得γ
b
和γ
d
;
[0048]
确定γ
b
和γ
d
后,由式(7)和(11)可分别解得倾侧角反转点的大气密度ρ
b
和ρ
d
,从而可确定倾侧角第一次反转的高度z
b
和第二次反转的高度z
d
以及飞行轨迹最低点高度z
c
,其中飞行器第二次倾侧反转高度z
d
是步骤三的迭代初值;
[0049]
因此得到了飞行器倾侧角的控制策略:飞行器先以180
°
倾侧角下压,当高度到达z
b
时倾侧角反转至0
°
进行爬升,当高度上升至z
d
时倾侧角从0
°
反转至180
°
实现弹道拉平,即
[0050][0051]
由上述推导分析,可得:
[0052][0053]
由式(17)可知,当飞行器升力系数c
l
增大时,cosγ
b
和cosγ
b
减小,由于减小,由于因此|γ
b
|、|γ
d
|都会增大,即γ
d
‑
γ
b
增大,使得v
e
降低;故飞行器
攻角α越大,升力系数c
l
越大,终端速度v
e
越小,因此飞行器的攻角控制策略为:飞行器始终保持大攻角飞行;
[0054]
步骤三、生成标称轨迹;
[0055]
考虑飞行器倾侧角变化率约束,按照步骤二确定的倾侧第一次反转高度z
b
、第二次反转高度z
d
进行数值积分,根据数值积分结果迭代更新z
d
,当数值积分结果满足终端期望状态时停止迭代,输出标准轨迹;
[0056]
步骤四、跟踪标称轨迹;
[0057]
飞行器在纵向平面内跟踪标称轨迹对应的高度
‑
航程剖面,从而确定纵向需用升力,采用横向比例导引法确定横向需用升力,从而能计算得到攻角指令和倾侧角指令;
[0058]
步骤五、速度控制;
[0059]
根据飞行器当前飞行状态和高度
‑
航程剖面,利用数值积分方法预测飞行器终端速度,再根据终端速度的预测值与期望值的偏差对攻角指令进行修正。
[0060]
其中,在步骤二中所述的“飞行器初始状态和期望终端状态”,是指飞行器在下压段开始时的飞行高度、弹道倾角和速度,以及期望飞行器在能量管理结束时具有的飞行高度、弹道倾角和速度;
[0061]
其中,在步骤三中所述的“飞行器倾侧角变化率约束”,是指飞行器的倾侧角从当前值变化至期望值的变化速率必须小于一给定值;
[0062]
其中,在步骤三中所述的“当数值积分结果满足终端期望状态时停止迭代,输出标准轨迹”,其具体作法如下:根据上一次数值积分结果对倾侧第二次反转高度进行调整,按照新的二次反转高度重新进行数值积分,重复该步骤,当二次反转高度收敛至满足终端要求的值时停止迭代,将最后一次数值积分的结果作为标准轨迹提供给飞行器制导系统进行跟踪;
[0063]
其中,在步骤四中所述的“高度
‑
航程剖面”,是指以剩余航程为自变量,以高度为应变量的函数,该定义为本领域的公知定义;
[0064]
其中,在步骤四中所述的“飞行器在纵向平面内跟踪标称轨迹对应的高度
‑
航程剖面,从而确定纵向需用升力,采用横向比例导引法确定横向需用升力,从而可计算得到攻角指令和倾侧角指令”,其具体做法如下:
[0065]
根据飞行器当前的航程s0和计算当前位置处h(s)对应的弹道倾角:
[0066][0067]
根据飞行器当前的航程s0和计算当前位置处h(s)对应的弹道倾角随航程变化率:
[0068][0069]
根据链式法则,由以及飞行器当前的速度v0和弹道倾角γ0计算当前位置处h(s)对应的弹道倾角随时间变化率:
[0070]
[0071]
根据以及飞行器当前的质量m0、速度v0、高度h0、弹道倾角γ0以及由航程s0和高度
‑
航程剖面确定的h(s0)、γ
c
(s0)可计算得到飞行器的纵向需用升力l
v
:
[0072][0073]
其中g为重力加速度,k1、k2为控制参数;
[0074]
由飞行器当前的方位角变化率计算横向比例导引指令:
[0075][0076]
由横向比例导引指令和飞行器当前质量m0、速度v0计算横向需用升力:
[0077][0078]
由纵向需用升力l
v
和横向需用升力l
h
计算总需用升力l
d
:
[0079][0080]
由总需用升力即可确定攻角指令:
[0081][0082]
由纵向需用升力l
v
和横向需用升力l
h
的比值可确定倾侧角指令σ
d
:
[0083]
σ
d
=arctan 2(l
h
,l
v
)
[0084]
ꢀꢀꢀꢀꢀꢀꢀ
(26)
[0085]
其中,在步骤五中所述的“根据飞行器当前飞行状态和高度
‑
航程剖面,利用数值积分方法预测飞行器终端速度”,是指根据飞行器当前航程、速度和高度
‑
航程剖面,利用单步欧拉法进行数值积分得到终端速度的预测值,该技术为本领域的公知技术;
[0086]
其中,在步骤五中所述的“根据终端速度的预测值与期望值的偏差对攻角指令进行修正”,其具体作法如下:
[0087]
由于飞行器受到的阻力与攻角正相关,因此根据终端速度的预测值与期望值的偏差生成附加攻角,修正后的攻角指令为如下形式:
[0088]
α
c
=α
d
+k(v
exp
‑
v
pre
)(sinσ)2[0089]
ꢀꢀꢀꢀꢀꢀꢀ
(27)
[0090]
其中α
d
为步骤四所确定的攻角指令,k为修正系数;
[0091]
通过以上步骤,可使飞行器在到达终端期望位置的同时满足终端速度约束,从而实现能量管理的目标;该方法科学,实用性强,且具有较好的鲁棒性,解决了现有的高超声速滑翔飞行器能量管理难题。
[0092]
(三)本发明的优点及功效
[0093]
(1)本发明基于解析推导和数值积分,得到了一种高超声速滑翔飞行器下压段能量管理方法,解决了现有方法的设计时间长、过程复杂的问题,可适用于临近空间飞行器能量管理问题;
[0094]
(2)本发明提出的能量管理方法具有时间次优性,能够大大减少飞行器进行能量管理飞行所用的时间和距离,对于很多飞行任务具有重要意义;
[0095]
(3)本发明所述能量管理方法科学,工艺性好,具有广阔推广应用价值。
附图说明
[0096]
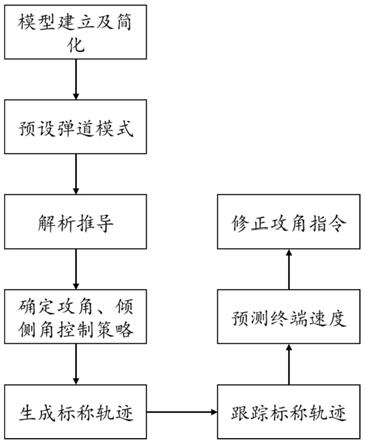
图1是本发明所述方法流程图;
[0097]
图2是飞行器运动学几何关系图;
[0098]
图3是预设弹道模式示意图图;
[0099]
图4是飞行器高度
‑
航程剖面图;
[0100]
图5是飞行器剖面跟踪效果图;
[0101]
图6是飞行器速度变化图;
[0102]
图7是飞行器高度变化图;
[0103]
图8是飞行器弹道倾角变化图;
[0104]
图中序号、符号、代号统一归纳说明如下:
[0105]
图2:o为坐标原点,即目标点,γ为航迹角,ψ表示航向角,飞行器速度为v;
[0106]
图3:a点为下压段起始点,b点为第一次倾侧反转点,c点为轨迹最低点,d点为第二次倾侧反转点,e点为能量管理结束点。
具体实施方式
[0107]
下面将结合附图和实施案例对本发明作进一步的详细说明;
[0108]
本发明一种高超声速滑翔飞行器下压段能量管理方法,其流程图如图1所示,它包括以下几个步骤;
[0109]
步骤一、模型建立及简化;
[0110]
根据平面大地假设,结合相关坐标系(如图2所示),根据各状态量之间几何和力学关系建立飞行器动力学模型,表达式如下:
[0111][0112]
其中x为目标点与飞行器质心连线在地面上的投影在正东方向上的分量,y为目标点与飞行器质心连线在地面上的投影在正北方向上的分量,z为飞行器的高度,v为飞行器的速度,γ为弹道倾角,ψ为航向角,σ为倾侧角,g为重力加速度,m为飞行器质量;其中弹道倾角γ是速度向量与当地水平面的夹角,航向角ψ是速度向量在当地水平面的投影与正北方向的夹角,顺时针方向旋转为正;l和d分别为升力和阻力,其表达式如下所示:
[0113][0114]
其中ρ(z)为大气密度,它是海拔高度z的函数;s
r
为飞行器参考面积,α为攻角,ma为马赫数,c
l
(α,ma)和c
d
(α,ma)分别为升力系数和阻力系数;
[0115]
以上飞行器动力学模型非线性程度高且变量间相互耦合,无法进行解析推导,因此对该模型做出如下简化:忽略飞行器重力影响,假设飞行器升阻比为常值,大气密度按照指数规律变化(即),飞行器仅在纵向平面内运动,飞行器倾侧角瞬时反转;
[0116]
基于以上假设,简化后的飞行器运动方程为:
[0117][0118]
从而得到了解析推导所使用的飞行器纵向动力学方程;
[0119]
步骤二、解析推导;
[0120]
由于飞行器的阻力d正比于大气密度ρ,而大气密度ρ随高度升高指数衰减,因此飞行器在低空受到的阻力显著增大,因此为了使飞行器进行大幅度减速,期望飞行器从初始高度俯冲至低空,再从低空爬升至期望高度并拉平弹道,因此将飞行过程分为两段:第一段从下压段起始高度俯冲至低空;第二段从低空爬升至期望终端高度;预设弹道模式如图3所示,其中a
‑
c段为第一段,c
‑
e段为第二段,b、d分别为倾侧反转点;
[0121]
步骤一中假设飞行器倾侧瞬时反转且飞行器仅在纵向平面内运动,因此倾侧角σ只能为0
°
或180
°
,即cos(σ)=
±
1;
[0122]
将(30)式中第二式与第三式相除并积分后可得:
[0123][0124]
其中,v0是初始速度,γ0为初始弹道倾角,k为常值升阻比,k=c
l
/c
d
,当σ为0
°
时取负号,σ为180
°
时取正号;
[0125]
将(30)式中第一式与第三式相除并积分可得:
[0126][0127]
对于a
‑
c段,飞行器首先以180
°
倾侧角翻身下压至b点,在b点倾侧角反转至0
°
使飞行器拉平轨迹,因此在a
‑
b段,有:
[0128][0129]
将上面公式整理可得:
[0130][0131]
由γ
c
≈γ
a
≈0,可得:
[0132][0133]
对于c
‑
e段,飞行器以倾侧角0
°
拉起至d点,再从d点倾侧反转至180
°
拉平;
[0134]
因此飞行器在c
‑
d段有:
[0135][0136]
在d
‑
e段,有:
[0137][0138]
将式(36)与(37)整理可得:
[0139][0140]
由于γ
e
≈γ
c
≈0,可得:
[0141][0142]
将式(35)和(39)联立可得:
[0143][0144]
[0145][0146]
其中v
e
、v
a
、ρ
e
、ρ
a
均为已知量,由以上式(40)、(41)、(42)可解得γ
b
和γ
d
;
[0147]
确定γ
b
和γ
d
后,由式(33)和(37)可分别解得倾侧角反转点的大气密度ρ
b
和ρ
d
,从而可确定倾侧角第一次反转的高度z
b
和第二次反转的高度z
d
以及飞行轨迹最低点高度z
c
,其中飞行器第二次倾侧反转高度z
d
是步骤三待定参数的迭代初值;
[0148]
因此得到了飞行器倾侧角的控制策略:飞行器先以180
°
倾侧角下压,当高度到达z
b
时倾侧角反转至0
°
进行爬升,当高度上升至z
d
时倾侧角从0
°
反转至180
°
实现弹道拉平,即
[0149][0150]
由上述推导分析,可得:
[0151][0152]
由式(44)可知,当飞行器升力系数c
l
增大时,cosγ
b
和cosγ
b
减小,由于减小,由于因此|γ
b
|、|γ
d
|都会增大,即γ
d
‑
γ
b
增大,使得v
e
降低;故飞行器攻角α越大,升力系数c
l
越大,终端速度v
e
越小;因此飞行器的攻角控制策略为:飞行器始终保持最大攻角飞行;
[0153]
综上,飞行器能量管理轨迹的倾侧角、攻角控制策略均可确定;
[0154]
步骤三、生成标称轨迹;
[0155]
步骤二推导过程中假设飞行器倾侧反转可瞬时完成,但实际飞行过程中飞行器倾侧反转需用一定时间,导致飞行器无法完全按照步骤二所确定的轨迹飞行,因此需要考虑倾侧变化过程以及过载约束,调整飞行器第二次倾侧反转的高度z
d
,使飞行器能够在期望的终端高度拉平弹道;
[0156]
确定待定参数z
d
的方法如下:
[0157]
第一步、将步骤二理论计算得到的第二次倾侧反转高度z
d
作为迭代初值即
[0158]
第二步、按照步骤二所确定的倾侧角、攻角控制策略进行数值积分仿真,数值积分的停止条件为
[0159][0160]
其中z
exp
为期望的终端高度;ε
γ
和ε
z
为人为设定的两个较小的数;
[0161]
提取数值积分停止时的高度z作为终端高度z
f
,对z
d
进行更新:
[0162][0163]
重复以上过程实现z
d
的迭代更新;
[0164]
第三步、当迭代次数达到所设定的上限值或者数值积分结果满足终端高度和终端弹道倾角的要求时停止迭代,输出最后一次数值积分的结果作为能量管理轨迹;
[0165]
步骤四、跟踪标称轨迹
[0166]
对标称轨迹对应的高度
‑
航程剖面进行数值差分,计算高度关于航程的一阶导数再对进行数值差分,计算高度关于航程的二阶导数
[0167]
根据飞行器的动力学方程有:
[0168][0169]
假设飞行器横向机动较小,则其航程随时间的变化可近似为
[0170][0171]
由链式法则可得高度关于航程的导数为:
[0172][0173]
从而根据飞行器当前的航程s0和可计算当前位置处h(s)对应的弹道倾角:
[0174][0175]
根据飞行器当前的航程s0和计算当前位置处h(s)对应的弹道倾角随航程变化率:
[0176][0177]
根据链式法则,由以及飞行器当前的速度v0和弹道倾角γ0计算当前位置处h(s)对应的弹道倾角随时间变化率:
[0178][0179]
根据以及飞行器当前的质量m0、速度v0、高度h0、弹道倾角γ0以及由航程s0和高度
‑
航程剖面确定的h(s0)、γ
c
(s0)可计算得到飞行器跟踪剖面的纵向需用升力l
v
:
[0180][0181]
其中等号右侧的最后两项为偏差项,用于消除跟踪误差,k1、k2为控制增益;
[0182]
由飞行器当前的方位角变化率计算横向比例导引指令:
[0183][0184]
由横向比例导引指令和飞行器当前质量m0、速度v0计算横向需用升力:
[0185][0186]
由纵向需用升力l
v
和横向需用升力l
h
计算总需用升力l
d
:
[0187][0188]
由总需用升力即可确定攻角指令:
[0189][0190]
由纵向需用升力l
v
和横向需用升力l
h
的比值可确定倾侧角指令σ
d
:
[0191]
σ
d
=arctan 2(l
h
,l
v
)
ꢀꢀꢀꢀ
(58)
[0192]
步骤五、速度控制;
[0193]
将当前飞行器的航程s0、速度v0和质量m0设置为预测时航程s、速度v和质量m的初值:
[0194]
s
←
s0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(59)
[0195]
v
←
v0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(60)
[0196]
m
←
m0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(61)
[0197]
计算高度h、高度h对航程s的导数h'和高度h对航程s的二阶导数h”为:
[0198]
h=h(s)
[0199]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(62)
[0200][0201][0202]
随后,计算弹道倾角γ,公式为:
[0203]
γ=arctan(h
′
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(65)
[0204]
随后,计算航程s对时间t的导数公式为:
[0205][0206]
随后,计算飞行路径角γ对航程s的导数γ',公式为:
[0207][0208]
随后,计算飞行路径角γ对时间t的导数公式为:
[0209][0210]
随后,计算法向力f
n
,公式为:
[0211]
[0212]
其中σ为倾侧角,μ为地球引力常数。
[0213]
随后,计算攻角α,数值求解关于攻角α的方程:
[0214][0215]
公式中t为推力,ρ为大气密度,s
ref
为参考面积,c
l
为与飞行器气动有关的函数。
[0216]
随后,计算轴向力f
t
,公式为:
[0217][0218]
公式中c
d
为与飞行器气动有关的函数。
[0219]
随后,计算速度v对时间t的导数公式为:
[0220][0221]
最后,计算速度v对航程s的导数v
′
,公式为:
[0222][0223]
本步骤计算质量m对航程s的导数m',公式为:
[0224][0225]
公式中为飞行器的燃料秒耗率,为航程s对时间t的导数(已在步骤二中计算得到);
[0226]
本步骤应用数值积分方法更新航程s、速度v和质量m,公式为:
[0227]
s
←
s+δs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(75)
[0228]
v
←
v+v
′
δs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(76)
[0229]
m
←
m+m
′
δs
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(77)
[0230]
公式中δs为欧拉法的积分步长;
[0231]
航程s、速度v和质量m更新完毕后:若航程s小于终止航程s
f
,则转步骤二继续计算;若航程s等于终止航程s
f
,则终止计算,终止速度的预测值为当前的v;
[0232]
由于飞行器受到的阻力与攻角正相关,因此根据终端速度的预测值与期望值的偏差生成附加攻角,修正后的攻角指令为如下形式:
[0233]
α
c
=α
d
+k(v
exp
‑
v
pre
)(sinσ)2[0234]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(78)
[0235]
其中α
d
为步骤四所确定的攻角指令,k为修正系数。
[0236]
仿真案例:
[0237]
本部分将以一个数值仿真案例作为方法演示,并非实际飞行任务。某飞行器质量m为1000.0kg,参考面积s
r
为0.9m2。飞行器的非线性气动系数c
l
和c
d
是马赫数和攻角的函数。大气模型使用美国标准大气(1976年)。
[0238]
飞行器下压段初始速度v0=3000m/s,初始高度h0=35000m,初始弹道倾角γ0=
0
°
,初始航向角ψ0=0
°
。能量管理终端的期望状态为:速度v
f
≈1600m/s,高度h
f
≈20000m,弹道倾角γ
f
≈0
°
。
[0239]
根据本方法实施过程,高度
‑
航程剖面如图4所示,跟踪效果如图5所示,飞行器的速度、高度、弹道倾角变化如图6、7、8所示,可见飞行器按照本方法进行飞行,可以满足能量管理的目标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1