一种辅助驾驶弯道轨迹跟踪控制方法
1.本发明涉及一种辅助驾驶技术领域,尤其涉及一种辅助驾驶弯道轨迹跟踪控制方法。
背景技术:
2.随着汽车工业、通信以及计算机等技术的快速发展,智能驾驶汽车不再遥不可及,它已经走进人们的生活。智能驾驶车辆安全问题一直被人所诟病,智能车辆主动安全技术逐渐成为当今研究的热点。
3.无人驾驶系统的核心大致可分为感知识别、决策规划和行为控制三个部分。作为实现自动驾驶的最后一步,行为控制模块至关重要。行为控制模块的核心在于控制器的设计,它实际上可以看作是系统跟踪期望轨迹的能力,考虑到车辆系统的强非线性以及运行过程中的干扰情况,跟踪控制器需要具有一定的抗干扰能力。而控制层跟踪控制器的设计多种多样,应用算法也各不相同,多采用经典控制理论如pid控制,现代控制理论如线性二次型控制、滑膜控制、鲁棒控制、mpc等,以及现在研究比较多的智能控制理论如模糊控制、神经网络控制、预瞄跟随理论以及不同算法相结合的控制策略。
4.有效的辅助驾驶轨迹跟踪控制系统需具备合理的传感器布置、兼顾稳定性和准确性的跟踪控制策略。目前,关于轨迹跟踪控制的研究所使用的方法大都与车身电子稳定系统联合使用,进行轨迹跟踪时横纵向控制的耦合因素为车辆行驶速度;轨迹跟踪过程中,当车辆保持原有速度而使车辆临界失稳时,车身电子稳定系统将介入控制车身稳定,但速度过大时仍然会使车辆发生侧滑甚至侧翻等失稳状况;因此,有必要对轨迹跟踪过程速度进行提前规划,提高弯道跟踪行驶效率,保证安全性。
技术实现要素:
5.发明目的:本发明所要解决的技术问题是针对背景技术中所涉及的缺陷,提出一种辅助驾驶弯道轨迹跟踪控制方法。
6.技术方案:
7.一种辅助驾驶弯道轨迹跟踪控制方法,包括如下步骤:
8.步骤1),摄像头采集当前时刻k车道线信息、障碍物信息以及车道限速信息,将识别的自车所在车道的车道线曲率κk=1/r、道路轨迹跟踪偏差ek=d
real k-d
desire k
、车道的限速v
lim k
传到can总线上,分别供vcu调取用于计算和判断;l和r为k时刻摄像头采集到的车道线长度和半径;d
real k
为k时刻车辆纵轴线与车道线的真实偏差,d
desire k
为k时刻车辆纵轴线与车道线的期望偏差;
9.步骤2),车速传感器、加速度传感器、前轮转角传感器分别收集k时刻汽车的车速u
v k
、轮速u
w k
、加速度αk、前轮转角δk,并将收集到的数据输入到can总线上供vcu进行计算;
10.步骤3),采用魔术公式轮胎模型计算出轮胎纵向力f
x
,根据车辆动力学公式计算出路面制动系数μb,再根据模糊估计算法估计k时刻道路附着系数μk;
11.步骤4),vcu根据接收到的车道线曲率κk、道路轨迹跟踪偏差ek、道路附着系数μk,利用模糊控制算法计算当前k时刻弯道k时刻规划速度u
plan k
;联合k时刻之前的每个时刻的规划速度,得到速度规划曲线;
12.步骤5),摄像头实时探测道路交通标志,当检测到道路限速为v
lim k
时,vcu利用卡尔曼滤波对速度规划曲线作平滑处理,并小于道路限速v
lim k
,若k时刻无道路限速时,不做限速处理,得出平滑合理的速度曲线;
13.步骤6),vcu计算k时刻规划速度u
pla n
与现实速度u
rea l
的偏差e
v k
=u
plank-u
rea
,通过脑情感学习回路控制器计算出k时刻期望加速度α
des k
,根据制动驱动切换策略判定车辆需要加速、减速或者怠速,最后分别根据逆发动机模型和逆制动器模型计算出自动踏板压力和节气门开度,进而控制车辆加减速;
14.步骤7),摄像头实时探测道路车道线位置,将k时刻车辆纵轴线与车道线的真实偏差d
real k
传到can总线上,vcu实时计算k时刻车辆纵轴线与车道线的期望偏差d
plan k
与真实偏差d
real k
的差值ek=d
real k-d
plan k
,并将偏差值ek输入到脑情感学习回路控制器计算出当前时刻车辆跟踪车道线所需前轮转角δk,最后通过can总线将δk输入车辆线控转向单元控制车辆实时跟踪车道线;
15.步骤8),按顺序重复步骤1)
‑‑‑
步骤7),计算k+1时刻的加速度和前轮转角。
16.进一步的,所述步骤3)具体包括:
17.步骤3.1)根据魔术公式轮胎模型计算出当前k时刻的轮胎纵向力f
x k
:
18.f
x
=d
x sin{c
x
arctan[b
x
λ-e
x
(b
x
λ-arctan b
x
λ)]}
[0019]cx
=1.62
[0020]dx
=a1f
z2
+a2fz[0021]bxcxdx
=a
3 sin[a4arctan(a5fz)](1-a
12
|λ|)
[0022]bxcxdx
=b
xcxdx
/c
xdx
[0023]ex
=a6f
z2
+a7fz+a8[0024]
其中,a1、a2、a3、a4、a5、a6、a7、a8、a
12
分别为魔术公式轮胎的拟合参数,fz为轮胎的垂直载荷,x表示车辆纵向,λ为滑移率,d
x
为峰值因子,b
x
为刚度因子,c
x
为曲线形状因子,e
x
为曲线曲率因子;
[0025]
步骤3.2)通过大量实验数据拟合六种路面:冰、雪、湿鹅卵石、湿沥青、干水泥、干沥青半经验轮胎-路面数学模型:
[0026][0027]
其中c1、c2、c3为该路面模型的三个参数;则可根据对应参数绘制出六种路面的λ-μ曲线;λ表示滑移率,μ为路面峰值附着系数;
[0028]
步骤3.3)计算制动力系数μb和滑移率λ:
[0029][0030]
λ=(u
w-uv)/uw[0031]
其中,uv表示汽车的车速,uw表示汽车的轮速;
[0032]
步骤3.4)设置模糊控制器,输入为μb和λ,输出为当前路面与六种路面的相似程度s1、s2、s3、s4、s5、s6;再采用加权平均法计算道路附着系数μk:
[0033][0034]
其中,μ1、μ2、μ3、μ4、μ5、μ6分别为六种路面的峰值附着系数。
[0035]
进一步的,所述步骤4)中,模糊控制算法的输入为车道线曲率κk、道路轨迹跟踪偏差ek和道路附着系数μk,根据if a and b and c then d的模糊规则,输出该时刻的道路规划速度u
plan k
,模糊规则为:
[0036]
步骤4.1)当车道线曲率κk过大时应减小车速,同时车速应低于该车道限速v
lim
,让车辆安全通过半径较小的弯道;
[0037]
步骤4.2)当道路附着系数μk较大时,应适当提升车速,同时车速应低于该车道限速v
lim
;
[0038]
步骤4.3)当道路轨迹跟踪偏差ek较大时,应适当降低车速,以便车辆在较短的距离内重新跟踪车道轨迹。
[0039]
进一步的,所述步骤6)中,大脑情感学习回路控制器计算期望加速度α
des k
步骤为:
[0040]
步骤6.1),输入刺激信号首先进入丘脑中进行深加工:
[0041][0042]
其中为输入刺激信号,n表示输入刺激信号的个数,为第j个隐含层神经元的中心点矢量值,γj》0为高斯函数的宽度(j=1,
…
,m),m∈n为输入信号总个数;
[0043]
步骤6.2),经过加工的信号sj进入感觉皮层后分别进入杏仁体和眶额皮质,杏仁核和眶额皮质的输出分别为:
[0044][0045][0046]
其中vj和wj(j=1,
…
,m)分别为杏仁体和眶额皮质的权重因子,,m)分别为杏仁体和眶额皮质的权重因子,为杏仁体的权重向量,为眶额皮质的权重向量;控制器的输出为:
[0047][0048]
其中u为控制器的输出α
des
;
[0049]
步骤6.3),权重因子更新过程为:
[0050][0051]
[0052][0053][0054][0055]
其中,s为经丘脑加工后的信号sj,f代表所要逼近的未知函数f(x),g代表所要逼近的未知函数g(x),γ1~γ4为可调参数,为误差矩阵,e为ev,u为控制器的输出α
des
,p是正定矩阵且满足λ
t
p+pλ=-q,q为任意n*n阶正定矩阵,b=[00...01]
tn
,v
fk
、v
gk
分别为杏仁体k时刻对应f(x)、g(x)的权重因子,w
fk
、w
gk
分别为前额皮质k时刻对应f(x)、g(x)的权重因子为一阶导数;
[0056]
步骤6.4),控制量u即车辆期望加速度α
des
的计算过程如下:
[0057][0058]
g(x)=(v
g-wg)s
[0059][0060]
u=g-1
(x)[-f(x)+x
d(n)
+k
t
e+ur]
[0061]
其中,s为经丘脑加工后的信号sj,为系统的状态变量,f(x)为未知平滑函数,且f(x)有界记为||f(x)||≤f《∞,g(x)为未知平滑函数,且g(x)有界记为||g(x)||≤g《∞;分别为f(x),g(x)的估计值;t表示时间,ε为大于零的数,x
d(n)
为期望速度的n阶导数,k=[kn,k
n-1
,k
n-2
,
…
,k1]
t
为系数矩阵,d(x,t)为与时间相关的干扰量,满足||d(x,t)||≤εd《∞,e为ev,误差矩阵为ur为系统鲁棒项,ρ(t)为w+d(x,t)的上界,
[0062]
进一步的,所述步骤7)中大脑情感学习回路控制器计算期望转向角δk的具体步骤为:
[0063]
步骤7.1),输入刺激信号首先进入丘脑中进行深加工:
[0064][0065]
其中为输入刺激信号,n表示输入刺激信号的个数,为第j个隐含层神经元的中心点矢量值,σj》0为高斯函数的宽度(j=1,
…
,m),m∈n为输入信号总个数;
[0066]
步骤7.2),经过加工的信号sj进入感觉皮层后分别进入杏仁体和眶额皮质,杏仁核和眶额皮质的输出分别为:
[0067]
[0068][0069]
其中vj和wj(j=1,
…
,m)分别为杏仁体和眶额皮质的权重因子,,m)分别为杏仁体和眶额皮质的权重因子,为杏仁体的权重向量,为眶额皮质的权重向量;控制器的输出为:
[0070][0071]
其中u为控制器的输出δk;
[0072]
步骤7.3),权重因子更新过程为:
[0073][0074][0075][0076][0077][0078]
其中,s为经丘脑加工后的信号sj,f代表所要逼近的未知函数f(x),g代表所要逼近的未知函数g(x),γ1~γ4为可调参数,为误差矩阵,e为ek,u为控制器的输出δk,p是正定矩阵且满足λ
t
p+pλ=-q,q为任意n*n阶正定矩阵,b=[0 0 ... 0 1]
tn
,v
fk
、v
gk
分别为杏仁体k时刻对应f(x)、g(x)的权重因子,w
fk
、w
gk
分别为前额皮质k时刻对应f(x)、g(x)的权重因子为一阶导数;
[0079]
步骤7.4),控制量u即车辆期望加速度δk的计算过程如下:
[0080][0081]
g(x)=(v
g-wg)s
[0082][0083]
u=g-1
(x)[-f(x)+x
d(n)
+k
t
e+ur]
[0084]
其中,s为经丘脑加工后的信号sj,为系统的状态变量,f(x)为未知平滑函数,且f(x)有界记为||f(x)||≤f《∞,g(x)为未知平滑函数,且g(x)有界记为||g(x)||≤g《∞;分别为f(x),g(x)的估计值;t表示时间,ε为大于零的数,x
d(n)
为期望轨迹的n阶导数,k=[kn,k
n-1
,k
n-2
,
…
,k1]
t
为系数矩阵,d(x,t)为与时间相关的干扰量,满足||d(x,t)||≤εd《∞,e为ek,误差矩阵为ur为系统
鲁棒项,ρ(t)为w+d(x,t)的上界,
[0085]
有益效果:
[0086]
1)采用智能模糊算法实时规划弯道不同点位的速度,结合车辆动力学约束实时规划车辆在不同道路位置的期望速度,并进行相应的平滑处理得到弯道期望速度曲线,保证车辆在不同曲率弯道的行驶稳定性。
[0087]
2)虽然大部分车辆都有车身稳定系统,但提前对弯道行驶进行速度规划,可以有效地减少车辆失稳状况,对弯道行驶安全施加双保险。
[0088]
3)利用类脑计算领域的大脑情感学习回路模型设计轨迹跟踪控制器,增加速度跟踪和轨迹跟踪精度缩小跟踪误差、减少驾驶员滞后响应时间、提高跟踪过程的稳定性。
附图说明
[0089]
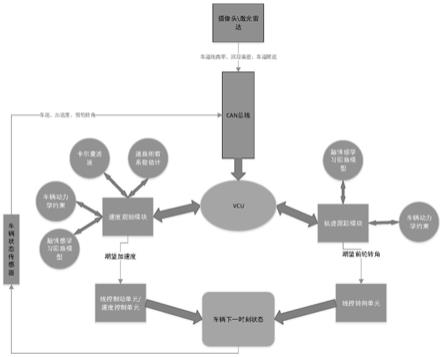
图1为辅助驾驶弯道轨迹跟踪控制系统逻辑框图;
[0090]
图2为径向基脑情绪神经学习模型图;
[0091]
图3为轨迹跟踪控制系统输入u计算框图。
具体实施方式
[0092]
下面结合附图对本发明做更进一步的解释。
[0093]
如图1所示,本发明辅助驾驶弯道轨迹跟踪控制系统的逻辑框图可分为七个功能部分:环境感知单元、自车传感器、can总线、vcu、线控制动单元、速度控制单元、线控转向单元。下面为对框图流程的具体解释:
[0094]
所述环境感知单元包括摄像头、激光雷达及毫米波雷达;所述自车传感器单元包括车速传感器、轮速传感器、加速度传感器、前轮转角传感器;所述摄像头安装在车辆前挡风玻璃正上方,用于识别车道线信息、障碍物信息、车道限速,并将图像信息传入vcu;所述激光雷达,数量至少2个(保证前端检测的安全性,防止单一雷达失效造成危险),分别安装在前端舱盖上和车顶上,用于检测前方障碍物与自车之间的相对距离以及前方车辆的速度、加速度,并将信息存储于can总线上,供vcu实时调取和处理;所述毫米波雷达,数量至少1个,安装在车辆前部的进气隔栅,用于检测远距离车辆与自车的相对距离,并将信息存储于can总线上,供vcu实时调取和处理;所述车速传感器、轮速传感器、加速度传感器与前轮转角传感器,分别用于收集车辆的速度、车轮转速、纵向加速度、前轮转角,并将信息存储于can总线上,供vcu实时调取和处理;所述线控转向单元包含转向助力电机以及转向控制器,用于接收vcu的转向信号,进行转向;所述线控制动单元包含制动轮缸,用于接收vcu的制动信号,进行制动;所述轮速控制单元包含车轮电机,用于接收vcu的轮速信号,对车速进行控制;所述电子控制单元vcu实现计算、判断、发出控制信号功能,用于根据接收到的自车的车速、自车轮速、纵向加速度、前轮转角以及车道线曲率、轨迹跟踪偏差、车道限速、道路附着系数等数值,分别计算出期望车辆加速度和期望前轮转角;vcu包括速度规划模块、轨迹跟踪模块,所述速度规划模块根据车道线曲率、轨迹跟踪偏差、道路附着系数计算出弯道的速度曲线,利用卡尔曼滤波和车辆动力学约束处理弯道速度曲线,使之更加平滑合理;所述轨迹跟踪控制模块使用脑情感学习回路模型搭建跟踪控制器,结合动力学约束计算春期望前
轮转角;期望前轮转角和期望加速度使车辆进入下一行驶状态。
[0095]
本发明还公开了一种辅助驾驶弯道轨迹跟踪控制方法,包括以下几个步骤:
[0096]
步骤1),摄像头采集当前时刻k车道线信息、障碍物信息以及车道限速信息,将识别的自车所在车道的车道线曲率κk=1/r、道路轨迹跟踪偏差ek=d
real k-d
desire k
、车道的限速v
lim k
传到can总线上,分别供vcu调取用于计算和判断;l和r为k时刻摄像头采集到的车道线长度和半径;d
real k
为k时刻车辆纵轴线与车道线的真实偏差,d
desire k
为k时刻车辆纵轴线与车道线的期望偏差;
[0097]
步骤2),车速传感器、加速度传感器、前轮转角传感器分别收集k时刻汽车的车速u
v k
、轮速u
w k
、加速度αk、前轮转角δk,并将收集到的数据输入到can总线上供vcu进行计算;
[0098]
步骤3),采用魔术公式轮胎模型计算出轮胎纵向力f
x
,根据车辆动力学公式计算出路面制动系数μb,再根据模糊估计算法估计k时刻道路附着系数μk;
[0099]
步骤3.1)根据魔术公式轮胎模型计算出当前k时刻的轮胎纵向力f
x k
:
[0100]fx
=d
x sin{c
x
arctan[b
x
λ-e
x
(b
x
λ-arctan b
x
λ)]}
[0101]cx
=1.62
[0102]dx
=a1f
z2
+a2fz[0103]bxcxdx
=a
3 sin[a4arctan(a5fz)](1-a
12
|λ|)
[0104]bxcxdx
=b
xcxdx
/c
xdx
[0105]ex
=a6f
z2
+a7fz+a8[0106]
其中,a1、a2、a3、a4、a5、a6、a7、a8、a
12
分别为魔术公式轮胎的拟合参数,fz为轮胎的垂直载荷,x表示车辆纵向,λ为滑移率,d
x
为峰值因子,b
x
为刚度因子,c
x
为曲线形状因子,e
x
为曲线曲率因子;
[0107]
步骤3.2)通过大量实验数据拟合六种路面:冰、雪、湿鹅卵石、湿沥青、干水泥、干沥青半经验轮胎-路面数学模型:
[0108][0109]
其中c1、c2、c3为该路面模型的三个参数;则可根据对应参数绘制出六种路面的λ-μ曲线;λ表示滑移率,μ为路面峰值附着系数;
[0110]
步骤3.3)计算制动力系数μb和滑移率λ:
[0111][0112]
λ=(u
w-uv)/uw[0113]
步骤3.4)设置模糊控制器,输入为μb和λ,输出为当前路面与六种路面的相似程度s1、s2、s3、s4、s5、s6;再采用加权平均法计算道路附着系数μk:
[0114][0115]
其中,μ1、μ2、μ3、μ4、μ5、μ6分别为六种路面的峰值附着系数。
[0116]
步骤4),vcu根据接收到的车道线曲率κk、道路轨迹跟踪偏差ek、道路附着系数μk,利用模糊控制算法计算当前k时刻弯道k点位处规划速度u
plan k
;联合k时刻之前的每个时刻的规划速度,则可以得到步骤5)所述的速度规划曲线。
[0117]
模糊控制算法的输入为车道线曲率κk、道路轨迹跟踪偏差ek和道路附着系数μk,根
据if a and b and c then d的模糊规则,输出该时刻的道路规划速度u
plan k
,模糊规则为:
[0118]
步骤4.1)当车道线曲率κk过大时应减小车速,同时车速应低于该车道限速v
lim
,让车辆安全通过半径较小的弯道;
[0119]
步骤4.2)当道路附着系数μk较大时,应适当提升车速,同时车速应低于该车道限速v
lim
;
[0120]
步骤4.3)当道路轨迹跟踪偏差ek较大时,应适当降低车速,以便车辆在较短的距离内重新跟踪车道轨迹。
[0121]
步骤5),摄像头实时探测道路交通标志,当检测到道路限速为v
lim k
时,vcu利用卡尔曼滤波对速度规划曲线作平滑处理,并小于道路限速v
lim k
,若k时刻无道路限速时,不做限速处理,得出平滑合理的速度曲线;
[0122]
步骤6),vcu计算k时刻规划速度u
pla n
与现实速度u
rea l
的偏差e
vk
=u
plank-u
rea
,通过脑情感学习回路控制器计算出k时刻期望加速度α
des k
,根据制动驱动切换策略判定车辆需要加速、减速或者怠速,最后分别根据逆发动机模型和逆制动器模型计算出自动踏板压力和节气门开度,进而控制车辆加减速;
[0123]
大脑情感学习回路控制器计算期望加速度α
des
步骤为:
[0124]
步骤6.1),输入刺激信号首先进入丘脑中进行深加工:
[0125][0126]
其中为输入刺激信号,n表示输入刺激信号的个数,为第j个隐含层神经元的中心点矢量值,σj》0为高斯函数的宽度(j=1,
…
,m),m∈n为输入信号总个数;
[0127]
步骤6.2),经过加工的信号sj进入感觉皮层后分别进入杏仁体和眶额皮质,杏仁核和眶额皮质的输出分别为:
[0128][0129][0130]
其中vj和wj(j=1,
…
,m)分别为杏仁体和眶额皮质的权重因子,,m)分别为杏仁体和眶额皮质的权重因子,为杏仁体的权重向量,为眶额皮质的权重向量;控制器的输出为:
[0131][0132]
其中u为控制器的输出α
des
;
[0133]
步骤6.3),权重因子更新过程为:
[0134]
[0135][0136][0137][0138][0139]
其中,s为经丘脑加工后的信号sj,f代表所要逼近的未知函数f(x),g代表所要逼近的未知函数g(x),γ1~γ4为可调参数,为误差矩阵,e为ev,u为控制输出α
des
,p是正定矩阵且满足λ
t
p+pλ=-q,q为任意n*n阶正定矩阵,b=[0 0 ... 0 1]
tn
,v
fk
、v
gk
分别为杏仁体k时刻对应f(x)、g(x)的权重因子,w
fk
、w
gk
分别为前额皮质k时刻对应f(x)、g(x)的权重因子为一阶导数;
[0140]
步骤6.4),控制量u即车辆期望加速度α
des
的计算过程如下:
[0141][0142]
g(x)=(v
g-wg)s
[0143][0144]
u=g-1
(x)[-f(x)+x
d(n)
+k
t
e+ur]
[0145]
其中,s为经丘脑加工后的信号sj,为系统的状态变量,f(x)为未知平滑函数,且f(x)有界记为||f(x)||≤f《∞,g(x)为未知平滑函数,且g(x)有界记为||g(x)||≤g《∞;分别为f(x),g(x)的估计值;t表示时间,ε为大于零的数,x
d(n)
为期望速度的n阶导数,k=[kn,k
n-1
,k
n-2
,
…
,k1]
t
为系数矩阵,d(x,t)为与时间相关的干扰量,满足||d(x,t)||≤εd《∞,e为ev,误差矩阵为ur为系统鲁棒项,ρ(t)为w+d(x,t)的上界,
[0146]
步骤6.5),根据怠速加速度值α,在怠速加速度附近设置了两个切换门限h1和h2,形成了一个过渡区域:
[0147]
表1执行器切换略
[0148][0149]
两个切换门限h1和h2决定着制动与驱动的控制时机。因此应合理取值,尤其是h1,当h1取值过小会导致车辆频繁轻微颤动,影响乘坐的舒适性。h1取值过大,制动会有延迟。h2的取值会影响驱动的控制,h2过小会导致加频繁加速,h2过大则会使系统有加速延迟。最终经过实验权衡,将门限h1与h2分别设置为0.05和0.3。
[0150]
步骤6.6),当控制策略输出对应为制动时,此时车辆需要进行制动操作,根据逆制
动器模型,考虑到空气阻力和滚动阻力,最终由逆制动器模型计算出期望的制动压力:
[0151][0152][0153]
式中t
wb,des
表示期望制动压力、m表示主车整车质量、g表示重力加速度、f表示滚阻系数、r
eff
表示车轮半径、cd表示空气阻力系数、a表示迎风面积v表示车速、kb为制动增益系数本文取20,pw表示期望制动压力;
[0154]
当控制策略输出对应为加速时,此时车辆需要进行加速操作,根据逆发动机模型三维查表,得出此加速度对应的节气门开度,从而实现加速操作;
[0155]
步骤7),摄像头实时探测道路车道线位置,将k时刻车辆纵轴线与车道线的真实偏差d
real k
传到can总线上,vcu实时计算k时刻车辆纵轴线与车道线的期望偏差d
plan k
与真实偏差d
real k
的差值ek=d
real k-d
plan k
,并将偏差值ek输入到脑情感学习回路控制器计算出当前时刻车辆跟踪车道线所需前轮转角δk,最后通过can总线将δk输入车辆线控转向单元控制车辆实时跟踪车道线;
[0156]
大脑情感学习回路控制器计算期望转向角δk的具体步骤为:
[0157]
步骤7.1),输入刺激信号首先进入丘脑中进行深加工:
[0158][0159]
其中为输入刺激信号,n表示输入刺激信号的个数,为第j个隐含层神经元的中心点矢量值,σj》0为高斯函数的宽度(j=1,
…
,m),m∈n为输入信号总个数;
[0160]
步骤7.2),经过加工的信号sj进入感觉皮层后分别进入杏仁体和眶额皮质,杏仁核和眶额皮质的输出分别为:
[0161][0162][0163]
其中vj和wj(j=1,
…
,m)分别为杏仁体和眶额皮质的权重因子,,m)分别为杏仁体和眶额皮质的权重因子,为杏仁体的权重向量,为眶额皮质的权重向量;控制器的输出为:
[0164][0165]
其中u为控制器的输出δk;
[0166]
步骤7.3),权重因子更新过程为:
[0167][0168][0169][0170][0171][0172]
其中,s为经丘脑加工后的信号sj,f代表所要逼近的未知函数f(x),g代表所要逼近的未知函数g(x),γ1~γ4为可调参数,为误差矩阵,e为ek,u为控制输出δk,p是正定矩阵且满足λ
t
p+pλ=-q,q为任意n*n阶正定矩阵,b=[0 0 ... 0 1]
tn
,v
fk
、v
gk
分别为杏仁体k时刻对应f(x)、g(x)的权重因子,w
fk
、w
gk
分别为前额皮质k时刻对应f(x)、g(x)的权重因子为一阶导数;
[0173]
步骤7.4),控制量u即车辆期望加速度δk的计算过程如下:
[0174][0175]
g(x)=(v
g-wg)s
[0176][0177]
u=g-1
(x)[-f(x)+x
d(n)
+k
t
e+ur]
[0178]
其中,s为经丘脑加工后的信号sj,为系统的状态变量,f(x)为未知平滑函数,且f(x)有界记为||f(x)||≤f《∞,g(x)为未知平滑函数,且g(x)有界记为||g(x)||≤g《∞;分别为f(x),g(x)的估计值;t表示时间,ε为大于零的数,x
d(n)
为期望轨迹的n阶导数,k=[kn,k
n-1
,k
n-2
,
…
,k1]
t
为系数矩阵,d(x,t)为与时间相关的干扰量,满足||d(x,t)||≤εd《∞,e为ek,误差矩阵为ur为系统鲁棒项,ρ(t)为w+d(x,t)的上界,
[0179]
步骤8),按顺序重复步骤1)
‑‑‑
步骤7),计算k+1时刻的加速度和前轮转角。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1