一种基于激光雷达的飞机牵引车自动对接导航装置及方法与流程
1.本发明属于智能机器人的自主定位与导航控制领域,具体涉及一种基于激光雷达的飞机牵引车自动对接导航装置及方法。
背景技术:
2.飞机在进行地面维护时,由于无法后退转弯,需要由飞机牵引车提供转向和动力进行移动。无杆式飞机牵引车通过夹持举升机构托举起飞机的前机轮,使前机轮离开地面,并通过自身牵引动力将飞机拖拽到指定位置。在牵引车作业过程中,夹持举升机构与飞机前机轮的对接是关键环节,对驾驶员的技术要求极高,存在碰撞刮蹭风险,影响作业效率。因此急需一种自动对接辅助装置,引导牵引车进行自主对接。本发明将基于激光雷达的目标感知技术应用在牵引车上,使对接过程自动化,并在此基础上实现牵引车的无人驾驶。
3.目前市面上应用的无杆式飞机牵引车都是采用人工操作对接方式,操作复杂,对驾驶员技术要求高,存在剐蹭与碰撞风险。关于飞机牵引车自动对接的研究较少,其中《智能无杆飞机牵引车视觉定位算法》(计算机工程第34卷第23期2008年8月),采用单目机器视觉系统获取飞机前机轮的图像,利用飞机轮胎在图像中的形状和位置计算偏距和偏角信息。然而其受环境影响较大,仅进行了计算机仿真,也没有对如何控制牵引车运动完成对接过程进行研究。
技术实现要素:
4.要解决的技术问题:
5.为了避免现有技术的不足之处,本发明提出一种基于激光雷达的飞机牵引车自动对接导航装置及方法,集成激光雷达、数据采集与计算平台、电子控制单元(ecu)、电比例液压阀的导航装置,通过激光雷达的2d点云数据,识别飞机起落架(机轮)、计算飞机牵引车与飞机间的相对位置和姿态,利用边界判断条件的控制律规划导航路线,通过电子控制单元和电比例阀控制牵引车的运动;由飞机起落架位置实时反馈和牵引车转向角度实时反馈构成双闭环控制回路,并且通过独特的控制逻辑设计,实现了牵引车的自主导航和自动对接飞机起落架功能。
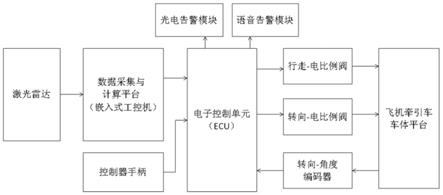
6.本发明的技术方案是:一种基于激光雷达的飞机牵引车自动对接导航装置,包括飞机牵引车车体平台,其特征在于:所述飞机牵引车车体平台上安装有激光雷达、数据采集与计算平台、电子控制单元、行走轮电比例阀、转向轮电比例阀、转向角度编码器、光电告警模块、语音告警模块和控制器手柄;所述激光雷达作为主传感器,通过扫描得到点云数据;所述数据采集与计算平台用于提取出飞机起落架位置信息、生成自动导航路线;所述电子控制单元控制行走轮、转向轮电比例阀开度,通过飞机起落架位置实时反馈和牵引车转向角度实时反馈构成双闭环控制回路;控制器手柄、光电告警和语音告警模块实现与操作人员的信息交互。
7.本发明的进一步技术方案是:所述激光雷达安装于飞机牵引车车体平台的夹持举
升机构正后方,保证其扫描面水平,扫描高度与飞机起落架高度一致。
8.本发明的进一步技术方案是:所述数据采集与计算平台、电子控制单元、光电告警模块、语音告警模块安装于飞机牵引车车体平台的控制柜内,各个单元模块通过线缆互联。
9.本发明的进一步技术方案是:所述数据采集与计算平台的外形尺寸小于140mmx100mmx50mm,功耗小于10w,1.0ghz以上cpu主频,具备100m网络通信接口,具有rs422通信接口,工作温度范围-20
°
~65
°
,能够通过网口采集激光雷达点云数据,能够执行飞机起落架识别与定位算法,能够执行牵引车导航控制算法,能够通过rs422接口向电子控制单元发送自动导航指令。
10.本发明的进一步技术方案是:所述电子控制单元搭载微处理器,具有2路-10v~+10v模拟电压连续输出通道,具有rs485、rs232、rs422通信接口,能够通过rs422接口接收数据采集与计算平台的发送自动导航指令,能够执行牵引车运动控制算法。
11.本发明的进一步技术方案是:所述行走轮电比例阀和转向轮电比例阀能够接收-10v~+10v模拟电压输入;根据电压幅值调整阀门开度,幅值越大开度越大;根据电压极性控制阀门导通方向,正电压正向导通,负电压反向导通。
12.一种基于激光雷达的飞机牵引车自动对接方法,其特征在于具体步骤如下:
13.步骤一:通过所述激光雷达扫描得到点云数据,该点云数据作为识别飞机起落架的原始数据;
14.步骤二:首先所述数据采集与计算平台接收点云数据,通过识别和定位计算得到飞机3个起落架的极坐标值;然后按照先消除偏航距离偏差、后消除偏航角度偏差的策略,生成导航路线,保证牵引车的自动行驶轨迹平滑,速度无突变;最后向所述电子控制单元发送自动导航指令;
15.步骤三:采用所述电子控制单元和电比例阀完成牵引车行驶的直接控制;电子控制单元接收步骤二生成的导航路线,并将控制量分配给行走轮电比例阀和转向轮电比例阀,控制牵引车的运动轨迹;利用激光雷达得到位置信息和转向角度编码器的角度信息实现双闭环控制,减小控制误差;
16.步骤四:通过所述光电告警模块和语音告警模块,将牵引车自动对接导航装置的工作状态呈现给操作人员;操作人员通过所述控制手柄进行导航装置的控制。
17.本发明的进一步技术方案是:所述步骤二中,数据采集与计算平台进行飞机起落架识别与定位计算方法,具体步骤如下:
18.首先,根据飞机起落架与激光雷达的相对角度关系划定扇形扫描区间,对该区域内的飞机三个起落架同时进行扫描识别;
19.然后,对扫描出的数据点逐一进行聚类操作:比较数据点的深度值,将深度信息偏差不超过飞机机轮直径30%的数据点集归为同一个聚类,并标记为一个机轮;
20.最后,对依次标记的3个聚类,进行模式匹配,进一步判断是否符合3个机轮的特征:模式匹配算法是利用飞机机轮呈等腰三角形分布的几何学特征,若3个聚类构成等腰三角形,且三边长度与飞机机轮实际数据相符,则匹配成功,判定为3个机轮。
21.本发明的进一步技术方案是:所述步骤二中,数据采集与计算平台牵引车导航控制算法,具体步骤如下:
22.首先,基于飞机的三个起落架的极坐标信息,即左后轮w1(ρ1,θ1)、右后轮w2(ρ2,θ
2)、前轮w0(ρ3,θ3),其中,ρ1~ρ3分别是三个机轮到激光雷达的距离,θ1~θ3分别是三个机轮相对于激光雷达的偏转角度;计算左、右起落架的距离偏差δρ(δρ=ρ2-ρ1);
23.然后,所述电子控制单元以100ms的控制周期,计算牵引车的行进速度控制电压v1和转向速度控制电压v2,并分别输出到动力轮和转向轮:对于v1:有v1=k*(ρ3-0.5),即牵引车越靠近飞机前机轮,行走速度越慢,直到牵引车和飞机前起落架的距离小于0.5m,牵引车停止前进;对于v2:当δρ大于0.1m时,v2=k1*(150
°‑
θ1),当δρ小于-0.1m时,v2=k2*(30
°‑
θ2),此时以消除偏航距离为主,使牵引车尽快回到飞机中轴线前方;当δρ介于-0.1~0.1m时,v2=k3*(90
°‑
θ3),此时以消除偏航角为主,使牵引车逐渐对正飞机前起落架;其中k、k1、k2、k3是控制参数,根据牵引车运动规律现场整定。
24.有益效果
25.本发明的有益效果在于:本发明采用了激光雷达的2d点云数据,结合聚类算法和模式匹配,精准识别机轮,并直接获得机轮的偏角和偏距信息。相比单目视觉定位算法,通过投影映射关系推算偏角和偏距,算法复杂度低,避免了环境光照的影响,工程实现更简单,系统可靠性高。同时,本发明的装置及方法,根据飞机定位结果设计了牵引车运动控制律。本发明的有益效果是,实现了对飞机牵引车的运动轨迹控制,自动完成与飞机前起落架(机轮)对接过程,相比传统的人工对接方式,作业效率更高,避免人为误操作导致的飞机剐蹭和碰撞。
附图说明
26.图1是本发明飞机牵引车自动对接导航装置组成示意图;
27.图2是本发明飞机牵引车双闭环控制回路示意图;
28.图3是本发明飞机牵引车三维模型示意图;
29.图4是本发明飞机牵引车自动对接运动轨迹示意图;
30.图5是本发明飞机牵引车自动对接作业流程图;
31.附图标记说明:1.控制器手柄;2.数据采集与计算平台;3.电子控制单元;4.激光雷达;5.语音告警模块;6.飞机牵引车车体平台;7.转向轮和转向轮电比例阀;8.行走轮和行走轮电比例阀。
具体实施方式
32.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
33.参照图1、3所示,本发明一种基于激光雷达的飞机牵引车自动对接导航装置,包括飞机牵引车车体平台,以及其上安装的激光雷达、数据采集与计算平台、电子控制单元、行走轮电比例阀、转向轮电比例阀、转向角度编码器、光电告警模块、语音告警模块和控制器手柄;所述激光雷达作为主传感器,安装于飞机牵引车车体平台的夹持举升机构正后方,保证其扫描面水平,扫描高度与飞机起落架高度一致,通过扫描得到点云数据;所述数据采集与计算平台、电子控制单元、光电告警模块、语音告警模块安装于飞机牵引车车体平台的控制柜内,各个单元模块通过线缆互联。
34.所述数据采集与计算平台用于提取出飞机起落架位置信息、生成自动导航路线;
外形尺寸小于140mmx100mmx50mm,功耗小于10w,1.0ghz以上cpu主频,具备100m网络通信接口,具有rs422通信接口,工作温度范围-20
°
~65
°
,能够通过网口采集激光雷达点云数据,能够执行飞机起落架识别与定位算法,能够执行牵引车导航控制算法,能够通过rs422接口向电子控制单元发送自动导航指令。
35.所述电子控制单元搭载微处理器,具有2路-10v~+10v模拟电压连续输出通道,具有rs485、rs232、rs422通信接口,能够通过rs422接口接收数据采集与计算平台的发送自动导航指令,能够执行牵引车运动控制算法。
36.所述行走轮电比例阀和转向轮电比例阀能够接收-10v~+10v模拟电压输入;根据电压幅值调整阀门开度,幅值越大开度越大;根据电压极性控制阀门导通方向,正电压正向导通,负电压反向导通。
37.所述转向角度编码器用于将牵引车转向角度反馈于电子控制单元。
38.所述电子控制单元控制行走轮、转向轮电比例阀开度,通过飞机起落架位置实时反馈和牵引车转向角度实时反馈构成双闭环控制回路;
39.所述控制器手柄、光电告警和语音告警模块实现与操作人员的信息交互。
40.本发明一种基于激光雷达的飞机牵引车自动对接方法,具体步骤如下:
41.步骤一:通过所述激光雷达扫描得到点云数据,该点云数据作为识别飞机起落架的原始数据;
42.步骤二:首先所述数据采集与计算平台接收点云数据,通过识别和定位计算得到飞机3个起落架的极坐标值;然后按照先消除偏航距离偏差、后消除偏航角度偏差的策略,生成导航路线,保证牵引车的自动行驶轨迹平滑,速度无突变;最后向所述电子控制单元发送自动导航指令;
43.步骤三:采用所述电子控制单元和电比例阀完成牵引车行驶的直接控制;电子控制单元接收步骤二生成的导航路线,并将控制量分配给行走轮电比例阀和转向轮电比例阀,控制牵引车的运动轨迹;利用激光雷达得到位置信息和转向角度编码器的角度信息实现双闭环控制,减小控制误差;
44.步骤四:通过所述光电告警模块和语音告警模块,将牵引车自动对接导航装置的工作状态呈现给操作人员;操作人员通过所述控制手柄进行导航装置的控制。
45.参照图2所示,所述数据采集与计算平台进行飞机起落架识别与定位计算方法的步骤如下:
46.首先,根据飞机起落架与激光雷达的相对角度关系划定扇形扫描区间,对该区域内的飞机三个起落架同时进行扫描识别;
47.然后,对扫描出的数据点逐一进行聚类操作:比较数据点的深度值,将深度信息偏差不超过飞机机轮直径30%的数据点集归为同一个聚类,并标记为一个机轮;
48.最后,对依次标记的3个聚类,进行模式匹配,进一步判断是否符合3个机轮的特征:模式匹配算法是利用飞机机轮呈等腰三角形分布的几何学特征,若3个聚类构成等腰三角形,且三边长度与飞机机轮实际数据相符,则匹配成功,判定为3个机轮。
49.所述数据采集与计算平台牵引车导航控制算法的步骤如下:
50.首先,基于飞机的三个起落架的极坐标信息,即左后轮w1(ρ1,θ1)、右后轮w2(ρ2,θ2)、前轮w0(ρ3,θ3),其中,ρ1~ρ3分别是三个机轮到激光雷达的距离,θ1~θ3分别是三个机
轮相对于激光雷达的偏转角度;计算左、右起落架的距离偏差δρ(δρ=ρ2-ρ1);
51.然后,所述电子控制单元以100ms的控制周期,计算牵引车的行进速度控制电压v1和转向速度控制电压v2,并分别输出到动力轮和转向轮:对于v1:有v1=k*(ρ3-0.5),即牵引车越靠近飞机前机轮,行走速度越慢,直到牵引车和飞机前起落架的距离小于0.5m,牵引车停止前进;对于v2:当δρ大于0.1m时,v2=k1*(150
°‑
θ1),当δρ小于-0.1m时,v2=k2*(30
°‑
θ2),此时以消除偏航距离为主,使牵引车尽快回到飞机中轴线前方;当δρ介于-0.1~0.1m时,v2=k3*(90
°‑
θ3),此时以消除偏航角为主,使牵引车逐渐对正飞机前起落架;其中k、k1、k2、k3是控制参数,根据牵引车运动规律现场整定。
52.参照图5所示,为本发明执行飞机牵引车自动对接导航流程。
53.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1