一种基于无线通信的陆空交互系统的制作方法
1.本实用新型属于陆空交互技术领域,具体涉及一种基于无线通信的陆空交互系统。
背景技术:
2.科学的不断进步与人工智能的发展使得机器人的应用已经渗透到社会各个领域,如在军事领域,利用无人机进行地形探索与侦查,在民事抢险救灾领域,利用救灾机器人抢险作业等。然而在有些环境下,gps信号不好或者环境过于杂乱,搜救机器人无法准确完成定位与路径规划,如在gps信号不好的偏远山区进行搜救行动,搜救机器人由于自身感知局限不得不进行地毯式的搜索,这样不仅费时费力,也可能错过黄金救援时间。而这时若是有空中机器人提供广大视角,并做路径规划对陆地搜救机器人加以引导,那么搜救机器人就能很顺利地执行搜救任务,这不仅提高了搜救效率,而且还争取了搜救时间,因此,在该环境下陆空机器人协同便显得尤为重要。
技术实现要素:
3.针对上述的技术问题,本实用新型提供了一种搜救效率高、适用范围广、通讯信号强的基于无线通信的陆空交互系统。
4.为了解决上述技术问题,本实用新型采用的技术方案为:
5.一种基于无线通信的陆空交互系统,包括无人机部分和智能车部分,所述无人机部分包括无人机和无人机控制模块,所述无人机控制模块包括无人机主控板、第一lora无线通信模块、飞行控制模块、摄像头模块、第一电源供电模块,所述无人机主控板分别连接有第一 lora无线通信模块、飞行控制模块、摄像头模块,所述第一电源供电模块分别与无人机主控板、飞行控制模块连接,所述无人机主控板连接在上位机上,所述无人机包括螺旋桨和电机,所述电机的转轴与螺旋桨连接,所述飞行控制模块连接有电机;所述智能车部分包括智能车和智能车控制模块,所述智能车控制模块包括智能车主控板、第二lora无线通信模块、驱动及动力模块、第二电源供电模块,所述智能车主控板分别连接有第二lora无线通信模块、驱动及动力模块,所述第二电源供电模块分别与智能车主控板、驱动及动力模块连接,所述第一lora无线通信模块与第二lora无线通信模块通过无线传输的方式连接,所述智能车包括智能车壳体、麦克纳姆轮、履带、直流电机、避障管,所述智能车壳体两侧的底部分别设置两个麦克纳姆轮,所述麦克纳姆轮与直流电机连接,所述智能车壳体一侧的两个麦克纳姆轮上啮合有履带,所述智能车壳体的前端设置有避障管,所述驱动及动力模块连接有直流电机,所述智能车主控板连接有避障管。
6.所述驱动及动力模块采用l298n芯片驱动。
7.所述无人机主控板包括stm32f407芯片、sx1278射频模块,所述sx1278射频模块连接在stm32f407芯片的5v上,所述stm32f407芯片上设有gnd和通信串口引脚,所述gnd接地,所述通信串口引脚分别与第一lora无线通信模块、飞行控制模块、摄像头模块连接。
8.所述飞行控制模块包括stm32f4芯片、mpu6050模块、惯性测量单元imu、气压计、磁罗盘,所述stm32f4芯片与mpu6050模块连接,所述惯性测量单元imu、气压计、磁罗盘集成在mpu 6050模块内部。
9.所述摄像头模块采用openmv摄像头模块,所述openmv摄像头模块采用以stm32f7 为核心集成的ov7725摄像头芯片。
10.所述智能车主控板采用正点原子的stm32f407开发版,所述正点原子的stm32f407开发版上设有避障管引脚、串口通信引脚、驱动模块引脚、电源引脚,所述避障管引脚与避障管连接,所述串口通信引脚连接有射频模块,所述驱动模块引脚连接有驱动及动力模块,所述电源引脚连接有第二电源供电模块。
11.所述第一电源供电模块、第二电源供电模块均采用12v航模电池,所述第一电源供电模块通过第一稳压模块分别与无人机主控板、飞行控制模块的电源引脚连接,所述第二电源供电模块通过第二稳压模块分别与智能车主控板、驱动及动力模块的电源引脚连接。
12.所述无人机采用四旋翼无人机。
13.本实用新型与现有技术相比,具有的有益效果是:
14.本实用新型通过摄像头识别与无线通信技术的陆空协议,将四旋翼无人机与麦克纳姆轮汽车相结合,实现对目标进行探测追踪、定位导航、军事打击、灾难救援等。本实用新型无人机携带摄像头在空中进行目标探测,智能车使用了麦克纳姆轮和升降履带作为底盘,实现全方位,多地形移动。本实用新型应用空间广泛,市场前景非常高,同时目前市场并无成熟作品,本实用新型将会在市场中求得极大的优势。
附图说明
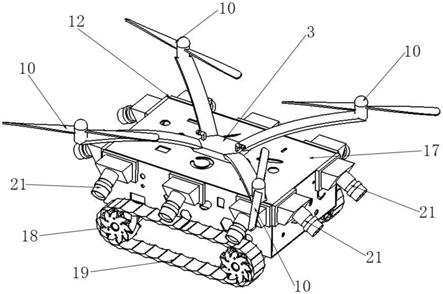
15.图1为本实用新型的结构示意图;
16.图2为本实用新型的整体框图;
17.图3为本实用新型的电路设计原理图一;
18.图4为本实用新型的电路设计原理图二;
19.图5为本实用新型的电路设计原理图三;
20.图6为本实用新型四旋翼无人机稳定飞行时各方向位移图;
21.图7为本实用新型四旋翼无人机轻微震动时各方向位移图;
22.图8为本实用新型智能车到达位置散点图。
23.其中:1为无人机部分,2为智能车部分,3为无人机,4为无人机控制模块,5为无人机主控板,6为第一lora无线通信模块,7为飞行控制模块,8为摄像头模块,9为上位机,10为螺旋桨,11为电机,12为智能车,13为智能车控制模块,14为智能车主控板,15为第二lora无线通信模块,16为驱动及动力模块,17为智能车壳体,18为麦克纳姆轮,19为履带,20为直流电机,21为避障管。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
25.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
26.一种基于无线通信的陆空交互系统,如图1、图2所示,包括无人机部分1和智能车部分2,无人机部分1包括无人机3和无人机控制模块4,无人机控制模块4包括无人机主控板 5、第一lora无线通信模块6、飞行控制模块7、摄像头模块8、第一电源供电模块,无人机主控板5分别连接有第一lora无线通信模块6、飞行控制模块7、摄像头模块8,第一电源供电模块分别与无人机主控板5、飞行控制模块7连接,无人机主控板5连接在上位机9上,无人机3包括螺旋桨10和电机11,电机11的转轴与螺旋桨10连接,飞行控制模块7连接有电机11。智能车部分2包括智能车12和智能车控制模块13,智能车控制模块13包括智能车主控板14、第二lora无线通信模块15、驱动及动力模块16、第二电源供电模块,智能车主控板14分别连接有第二lora无线通信模块15、驱动及动力模块16,第二电源供电模块分别与智能车主控板14、驱动及动力模块16连接,第一lora无线通信模块6与第二lora 无线通信模块15通过无线传输的方式连接,其具有体积小、功耗低、传输距离远、抗干扰能力强等特点。在无人机3搭载的第一lora无线通信模块6收到无人机主控板5传来的目标位置信息以及前方路面状况的数据信息后,它及时将信息数据通过无线通信的方式传送给智能车12,完成无线通信。智能车12包括智能车壳体17、麦克纳姆轮18、履带19、直流电机 20、避障管21,智能车壳体17两侧的底部分别设置两个麦克纳姆轮18,麦克纳姆轮18与直流电机20连接,智能车壳体17一侧的两个麦克纳姆轮18上啮合有履带19,智能车壳体17 的前端设置有避障管21,驱动及动力模块16连接有直流电机20,智能车主控板14连接有避障管21。麦克纳姆轮18转动灵活,可向任意方向移动适合于不同的路面环境进行灵活移动,在面对环境恶劣的路面时可以切换成履带模式,进行高效行驶越过障碍地段,同时车体的避障管21可以有效探测路面信息避开障碍物使得车体行驶高效快速。
27.进一步,优选的,驱动及动力模块16采用l298n芯片驱动。l298n是一种高电压、大电流电机驱动芯片。该芯片采用15脚封装。主要特点是:工作电压高,最高工作电压可达 46v;输出电流大,瞬间峰值电流可达3a,持续工作电流为2a;额定功率25w。内含两个 h桥的高电压大电流全桥式驱动器,具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用l298n芯片驱动电机,该芯片可以驱动两台直流电机。
28.进一步,如图3所示,无人机主控板5包括stm32f407芯片、sx1278射频模块,sx1278 射频模块连接在stm32f407芯片的5v上,stm32f407芯片上设有gnd和通信串口引脚,gnd 接地,通信串口引脚分别与第一lora无线通信模块6、飞行控制模块7、摄像头模块8连接。
29.进一步,飞行控制模块7包括stm32f4芯片、mpu6050模块、惯性测量单元imu、气压计、磁罗盘,stm32f4芯片与mpu6050模块连接,惯性测量单元imu、气压计、磁罗盘集成在mpu 6050模块内部。在飞行器飞行过程中,传感器检测飞行器的飞行高度、速度、角度及位置信
息,根据主控板发送的飞行指令,控制飞行器的不同系统做出相应的动作,调整各个动力的输出功率等,从而达到改变飞行姿态的目的。
30.进一步,摄像头模块8采用openmv摄像头模块,openmv摄像头模块采用以stm32f7 为核心集成的ov7725摄像头芯片。
31.进一步,智能车主控板14采用正点原子的stm32f407开发版,正点原子的stm32f407开发版上设有避障管引脚、串口通信引脚、驱动模块引脚、电源引脚,避障管引脚与避障管21 连接,串口通信引脚连接有射频模块,驱动模块引脚连接有驱动及动力模块16,电源引脚连接有第二电源供电模块。
32.进一步,第一电源供电模块、第二电源供电模块均采用12v航模电池,第一电源供电模块通过第一稳压模块分别与无人机主控板5、飞行控制模块7的电源引脚连接,第二电源供电模块通过第二稳压模块分别与智能车主控板14、驱动及动力模块16的电源引脚连接。
33.进一步,无人机3采用四旋翼无人机。
34.本实用新型对无人机起飞(降落)极限速度进行了测试,测试结果如表1所示。如图4、图5所示,将无人机稳定飞行与轻微抖动时经运动传感器icm20602融合后的数据进行记录并绘图比较,图中数据为1750-1900附近为无人机起飞时的震动数据,故震动较大;当无人机悬停时(大于2000),震动明显下降;无人机整体稳定性较好。
[0035][0036]
表1:无人机极限飞行速度测试表
[0037]
本实用新型对lora无线通信方式的通信距离进行了测试,表2为测试结果。
[0038][0039]
表2:无线通信距离测试表
[0040]
本实用新型以目标位置为圆心,将每次智能车到达位置进行记录,做出了散点图,如图 6所示,从图中可以看出,智能车到达位置在原点附近四周都有分布,具有随机性,说明系统稳定。
[0041]
无线方案的比较:
[0042]
方案一:采用蓝牙无线通信模块:蓝牙(bluetooth)是一种设备之间进行无线通信的技术,可实现固定设备、移动设备和楼宇个人域网之间的短距离数据交换,蓝牙可连接多
个设备,蓝牙使用短波特高频(uhf)无线电波,经由2.4至2.485ghz的ism频段来进行通信,但是通信距离只有几米到几十米,通信距离达不到四旋翼的飞行距离,具有高功耗,高复杂度,通信距离短等缺点,并且仅适合家庭和个人使用。
[0043]
方案二:采用lora无线通信模块:lora通信模块的灵敏度高达-139dbm,通信距离大于7000千米,通信距离远,同时有高灵敏度、抗干扰性强。因lora模块选用lora无线扩频技术,具有高接收灵敏度-139dbm,相比传统gfsk、fsk模块具有更好的穿透力,可以大大减少网关数量和施工成本。在山野丛林、湖泊等复杂环境中,工业控制领域常常要求通信传输距离远。lora模块空旷传输距离5000米以上,可以解决低功耗和远距离不能兼得的难题。同时在节约能源、延长产品使用寿命上,具有重要意义。
[0044]
方案三:采用zigbee无线通信模块:zigbee是一种无线通信技术,zigbee模块都是遵循ieee802.15.4的国际标准,并且运行在2.4ghz的频段上,并且优势十分明显,其布局简单,抗干扰,传输可靠性高,使用方便,成本低廉,缺点是通信距离短,通信距离达不到四旋翼的飞行距离,无法正常交换信息进行通信。
[0045]
综上所述,方案二最为合适,适合于无人机于地面汽车的通信。
[0046]
上面仅对本实用新型的较佳实施例作了详细说明,但是本实用新型并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化,各种变化均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1