一种小型巡线无人机及地面接收装置
1.本实用新型属于无人机电力设备巡检技术领域,具体涉及一种小型巡线无人机及地面接收装置。
背景技术:
2.近几年随着科技水平的提高,国内外都在进行无人机电力巡检的相关研究,无人机在技术上存在的一些难题己逐渐得到克服,并且可以根据需要携带相应设备完成指定任务。
3.不过,采用的往往都是针对野外环境的大中型多旋翼无人机,在城市等一些建筑密集区和有普通群众及车辆存在的情况下,会存在起飞障碍与危险。并且应用无人机进行巡线的方法一般是通过飞手控制无人机沿输电线路飞行,利用无人机搭载的摄像机采集视频与图像,并将采集到的视频与图像通过储存装置带回地面,再由经验丰富的工作人员查看视频与图像,判断线路是否存在异常。这种巡检方式不但需要大量的人力和财力,更重要的是飞手的视觉角度有限,每次只能在小范围内进行飞行,并且很难完全正确的判断无人机位置,极度容易造成安全事故。
技术实现要素:
4.本实用新型所要解决的技术问题是针对上述现有技术的不足提供一种小型巡线无人机及地面接收装置,其降低无人机巡线过程中的人工参与率与意外发生率、提高巡线效率,避免无人机巡检精度低以及复杂地形难以作业的问题,实现无人机自主的沿输电线路巡检飞行。
5.为实现上述技术目的,本实用新型采取的技术方案为:
6.一种小型巡线无人机及地面接收装置,其中:包括主控模块、定位模块、视觉模块、数据存储模块、通讯模块、微波雷达、云台、遥控接收机、led模块、无人机机体和地面接收装置,所述的云台安装在无人机机体上,所述的视觉模块和微波雷达都安装在云台上,所述的主控模块、定位模块、数据存储模块、通讯模块、遥控接收机和led模块都安装在无人机机体上,所述的主控模块由中央处理器、陀螺仪、气压计和降压芯片组成,所述的定位模块由地磁和gps组成,所述的定位模块与主控模块连接,所述的视觉模块由摄像头和图像处理器组成,所述的视觉模块与主控模块相连且视觉模块与通讯模块连接,所述的数据存储模块由tf卡和蓝牙组成,所述的数据存储模块与主控模块相连,所述的通讯模块由数传电台与图传电台组成,所述的通讯模块与主控模块相连,所述的微波雷达、云台、遥控接收机和led 模块都与主控模块连接,所述的地面接收装置由地面端处理器、第一数传电台、第一图传电台和usb接口组成,所述的地面接收装置与通讯模块相连。
7.为优化上述技术方案,采取的具体措施还包括:
8.上述的主控模块中的中央处理器采用arm处理器。
9.上述的视觉模块中的摄像头采用ov5640摄像头。
10.上述的视觉模块中的图像处理器采用勘智k210芯片。
11.上述的微波雷达采用uav
‑
r21型号的毫米波雷达。
12.上述的地面接收装置中的地面端处理器采用stm32f407芯片。
13.本实用新型搭载了各种轻量化模块,具有体积小、重量轻、功能多等优点,并且通过定位模块、视觉模块、微波雷达的融合使用,可以有效完成追弧巡检、通道巡检、和绝缘子识别等功能,能够使无人机在建筑密集和复杂环境区域实现自主的巡线飞行,极大降低人工参与率,提高巡检的效率,降低巡检过程中的意外发生概率;视觉模块和微波雷达都可以获取输电线路相对无人机的方向以及与无人机机体的距离,但是单独的使用获得的数据往往会存在不可避免的误差,本实用新型将视觉模块与微波雷达相结合使用,搭配卡尔曼融合算法能够准确获取输电线路相对无人机的方向以及与无人机机体的距离,为无人机提供有效的线路信息,提高巡线效果;通过搭载数据存储模块,能够获得巡检过程中的无人机控制系统的状态信息,为系统后续的工作过程分析提供保障,并且搭载了蓝牙通信,可以与安卓手机端的调参app进行数据通信,可以通过调参app查看并设置无人机的状态参数,如查看并设置 pid参数、查看电池电压、设置安全电压、设置自主飞行速度等;将视觉模块与微波雷达搭载在云台上,可以通过控制云台实时调整摄像模块与微波雷达对于线路的角度,保障线路数据获取的准确性;通过集成数传电台和图传电台,可以在pc端地面站实时查看无人机状态和被处理过的线路分析视频以及更改无人机参数;通过led模块不同的颜色及闪烁频率显示,方便及时观察无人机状态。
14.本实用新型的优点在于以下几点:降低无人机巡线过程中的人工参与率与意外发生率、提高巡线效率,避免无人机巡检精度低以及复杂地形难以作业的问题,实现无人机自主的沿输电线路巡检飞行;通过定位模块、视觉模块、微波雷达的融合使用,可以有效完成追弧巡检、通道巡检、和绝缘子识别等功能,能够使无人机在建筑密集和复杂环境区域实现自主的巡线飞行,极大降低人工参与率,提高巡检的效率,降低巡检过程中的意外发生概率。
附图说明
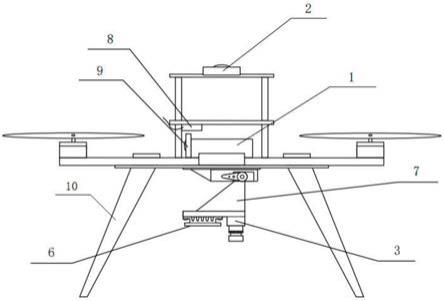
15.图1是本实用新型无人机的结构主视图;
16.图2是本实用新型无人机的结构俯视图;
17.图3是本实用新型无人机的组成原理图;
18.图4是本实用新型地面接收装置的组成原理图;
19.图5是本实用新型无人机与地面接收装置的连接原理图。
20.其中的附图标记为:主控模块1、中央处理器101、陀螺仪102、气压计103、降压芯片 104、定位模块2、地磁201、gps 202、视觉模块3、摄像头301、图像处理器302、数据存储模块4、tf卡401、蓝牙402、通讯模块5、数传电台501、图传电台502、微波雷达6、云台7、遥控接收机8、led模块9、无人机机体10、地面接收装置11、地面端处理器1101、第一数传电台1102、第一图传电台1103、usb接口1104。
具体实施方式
21.下面结合附图对本实用新型的具体实施方式作出进一步说明:
22.一种小型巡线无人机及地面接收装置,其中:包括主控模块1、定位模块2、视觉模块3、数据存储模块4、通讯模块5、微波雷达6、云台7、遥控接收机8、led模块9、无人机机体10和地面接收装置11,所述的云台7安装在无人机机体10上,所述的视觉模块3和微波雷达6都安装在云台7上,所述的主控模块1、定位模块2、数据存储模块4、通讯模块5、遥控接收机8和led模块9都安装在无人机机体10上,所述的主控模块1由中央处理器101、陀螺仪102、气压计103和降压芯片104组成,所述的定位模块2由地磁201和gps 202组成,所述的定位模块2与主控模块1连接,所述的视觉模块3由摄像头301和图像处理器302 组成,所述的视觉模块3与主控模块1相连且视觉模块3与通讯模块5连接,所述的数据存储模块4由tf卡401和蓝牙402组成,所述的数据存储模块4与主控模块1相连,所述的通讯模块5由数传电台501与图传电台502组成,所述的通讯模块5与主控模块1相连,所述的微波雷达6、云台7、遥控接收机8和led模块9都与主控模块1连接,所述的地面接收装置11由地面端处理器1101、第一数传电台1102、第一图传电台1103和usb接口1104 组成,所述的地面接收装置11与通讯模块5相连。
23.实施例中,主控模块1中的中央处理器101采用arm处理器。
24.实施例中,视觉模块3中的摄像头301采用ov5640摄像头。
25.实施例中,视觉模块3中的图像处理器302采用勘智k210芯片。
26.实施例中,微波雷达6采用uav
‑
r21型号的毫米波雷达。
27.实施例中,地面接收装置11中的地面端处理器1101采用stm32f407芯片。
28.本实用新型主要包括:主控模块1,主要管理各个模块以及自身陀螺仪102与气压计103 数据采集,并运行无人机控制算法;定位模块2,主要测量无人机的位置、方向速度信息;视觉模块3,用于采集线路的图像与视频,并对视频进行实时处理;数据存储模块4,主要负责无人机状态信息的采集与蓝牙连接;通讯模块5,主要用于与地面接收装置11的数据与图像传输;微波雷达6,用于辅助测量无人机与线路的距离;云台7,用于控制搭载的视觉模块及微波雷达的角度;遥控接收机8,负责与遥控器进行通信;led模块9,用于显示无人机自身的状态;地面接收装置11包括:地面端处理器1101,主要负责地面端各个模块的通信;第一数传电台1102与第一图传电台1103,用于与无人机机体搭载的通讯模块5通信,进行数据与视频的传输;usb接口1104,用于连接pc端,使得地面接收装置11可以与地面站进行通信;本实用新型通过较小的无人机搭载智能识别与远程传输功能,可以完成在建筑密集和复杂环境区域的自主输电线路巡检。
29.本实用新型中的主控模块1主要负责向各个模块发送命令或采集数据,并实现整个无人机系统的控制,主控模块1的中央处理器101是整个飞控系统的核心,可以采用arm处理器,可以使用stm32f407芯片,主控模块1的陀螺仪102用于采集无人机的姿态信息,可以采用型号为icm20602六轴传感器;定位模块2搭载在无人机机体10的最上方,并进行了一定的架高,减少定位模块2的信号干扰,gps 202用于采集无人机的位置信息与速度信息,地磁201用于采集无人机的航向信息,定位模块2可以采用beitian的bn
‑
880gps模块,内置了地磁,主控模块1可以通过串口通信获得gps数据,通过iic通信获得地磁数据;视觉模块3由摄像头301和图像处理器302组成,摄像头301用于采集线路巡检图像并发送至图像处理器302,图像处理302对接收到的图像进行图像预处理、边缘检测算法、霍夫变换算法、otsu算法等计算,并将最终所需的巡检线路信息通过串口发送至主控模块1;视觉模块 3采用
ov5640摄像头进行图像采集,图像处理器302采用勘智k210芯片;数据存储模块4 主要由tf卡401和蓝牙402组成,tf卡401用于存储主控模块1发送的数据,并且方便插拔,易于通过读卡器读取无人机整个作业过程中的状态信息,蓝牙402用于与手机端连接,手机安装专用app通过蓝牙读取无人机的参数信息,并且可以更改参数;通讯模块5主要由数传电台501与图传电台502组成,主要通过与地面接收装置11通信,达到与pc端的地面站实时数据传输,数传电台501主要通过串口通信与主控模块1进行数据交互,广播无人机实时的状态信息与参数至地面接收装置11,并且接受地面站通过地面接收装置11发送的命令,图传电台502通过ntsc标准与图像处理器302进行通信,以获得经过处理后的线路视频,并经过地面接收装置11将视频广播到地面站进行显示;云台6用于搭载视觉模块3与微波雷达6,通过接收主控模块1的pwm信号,调整视觉模块3与微波雷达6的角度,使得巡检的线路一直处于摄像头301拍摄视频的中心以及与微波雷达6视觉保持垂直;微波雷达6 用于检测巡检线路距离无人机的距离与方向,微波雷达6采用uav
‑
r21型号的毫米波雷达;遥控接收机8用于接收遥控器的控制信号,采用s.bus通信接收机与主控模块1进行通信; led模块9用于接收主控模块1对于自身的状态判断数据,并且对不同的状态进行不同的led 闪烁显示,采用rgb灯,以便于能够对更多的状态进行显示;地面接收装置11的地面端处理器1101用于第一数传电台1102、第一图传电台1103与usb接口1104的数据通信,采用 stm32f407芯片;地面接收装置11的第一数传电台1102与第一图传电台1103需要与无人机机体10的通讯模块5所述的数传电台501及图传电台502相匹配,达到数据的透明传输;地面接收装置11的usb接口1104用于连接pc端,达到地面接收装置11与pc端数据的传输。
30.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1