一种基于硬件在环的混合动力整车控制策略测试系统及方法与流程
1.本发明涉及汽车测试技术领域,尤其是涉及一种基于硬件在环的混合动力整车控制策略测试系统及方法。
背景技术:
2.我国出台双积分及各类相关产业政策以期降低传统汽车能耗、推动节能和新能源汽车产业发展。在混合动力汽车中,增程式电动汽车成本较低、节约能耗,同时较好的解决了纯电动汽车里程焦虑的问题,得到了市场的认可,促使了增程器和增程器专用发动机的研发。整车控制器是增程式电动汽车的核心电子部件,其性能决定着增程式电动汽车是否能实现节能目的。整车控制策略又是整车控制器的关键技术。在整车控制策略的开发阶段,需要对控制策略进行性能测试。
3.目前,广泛应用于汽车行业的整车控制器硬件在环测试的实时仿真系统包括etas和dspace。etas labcar硬件在环系统通过模拟整车环境和信号交互环境进行控制器功能测试。labcar硬件系统主要由上位机、仿真工控机rtpc、断接盒面板、io信号板卡箱、负载板卡箱、故障注入单元、可编程电源等组成。rtpc通过自定义的host网口与上位机连接,通过远程控制页面与断接盒面板、io信号板卡箱、负载板卡箱连接。断接盒面板的主要功能是与被测试控制器相连,为各种信号类型提供标准的信号接口。io信号板卡箱可根据ecu信号需要灵活配置io板卡。通过io信号板卡箱与rtcp的通讯连接保证被测控制器(整车控制器)与rtcp的仿真模型参数的高效交互。另一种方法是使用dspace设备进行整车模拟测试. dspace硬件系统主要由上位机、dspace实时仿真设备、整车控制器组成。上位机将仿真输入参数发送给实时仿真设备,并显示系统运行数据。实时仿真设备包括仿真测试模型,通过模型计算系统实时运行状态信息。系统工作时,dspace实时仿真设备根据上位机的仿真输入参数和整车控制器的控制信号,利用仿真模型获得车辆和增程器的运行状态,并将运行状态转换为整车控制器所需的真实信号。
4.增程器开发阶段需要进行整车控制策略测试及验证,但是目前常用的hil仿真测试系统etas和dspace的测试设备价格高昂,测试成本高。
5.
技术实现要素:
6.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于硬件在环的混合动力整车控制策略测试系统及方法。
7.本发明的目的可以通过以下技术方案来实现: 一种基于硬件在环的混合动力整车控制策略测试系统,包括:整车控制器,用于同时运行内置集成于所述整车控制器的整车物理模型和整车控制策略模型以进行仿真测试;负载箱,用于为所述整车控制器提供所需的硬件接口输入输出控制信号;
can总线工具,用于支持所述上位机与所述整车控制器的通讯,并于测试过程中检测信号和标定软件;上位机,用于实时监控所述整车物理模型和整车控制策略模型的参数。
8.进一步地,整车物理模型包括:整车目标车速循环曲线模块,用于设置测试过程中的整车目标车速循环曲线相关模型参数;驾驶员模型,用于设置测试过程中的驾驶员相关模型参数;电动汽车模型,用于设置测试过程中的电动汽车所对应的相关模型参数;增程器模型,用于设置测试过程中的增程器所对应的相关模型参数。
9.进一步地,电动汽车模型包括车辆动力学模型、变速器模型、tm电机模型和动力电池模型。
10.进一步地,增程器模型包括isg电机模型和发动机模型。
11.进一步地,整车控制策略模型包括:整车电驱动控制策略模块,用于控制所述电动汽车模型中的tm电机模型;增程器控制策略模块,用于控制所述增程器模型。
12.进一步地,上位机采用内置有inca实时监控软件的上位机。
13.本发明还提供了一种基于硬件在环的混合动力整车控制策略测试系统的测试方法,包括以下步骤:步骤1:基于matlab simulink建立所述整车物理模型和整车控制策略模型,并完成对应的软件仿真测试;步骤2:将仿真测试完毕的模型刷写于所述整车控制器中,并应用整车控制器hil测试以验证整车控制策略。
14.进一步地,步骤1中的整车物理模型包括:整车目标车速循环曲线模块,用于设置测试过程中的整车目标车速循环曲线相关模型参数;驾驶员模型,用于设置测试过程中的驾驶员相关模型参数;电动汽车模型,用于设置测试过程中的电动汽车所对应的相关模型参数;增程器模型,用于设置测试过程中的增程器所对应的相关模型参数;所述的电动汽车模型包括车辆动力学模型、变速器模型、tm电机模型和动力电池模型;所述的增程器模型包括isg电机模型和发动机模型。
15.进一步地,步骤1中的整车控制策略模型包括:整车电驱动控制策略模块,用于控制所述电动汽车模型中的tm电机模型;增程器控制策略模块,用于控制所述增程器模型。
16.进一步地,步骤1中的仿真测试的过程具体包括:步骤101:利用所述整车物理模型根据目标车速和实际车速之间的差值通过pid控制输出多种信号至所述整车控制策略模型中的整车电驱动控制策略模块;所述整车电驱动控制策略模块根据接收的信号解析所述整车物理模型中的tm电机的需求功率,并将tm电机需求功率信号传递给所述整车控制策略模型中的增程器控制策略模块;
步骤102:利用所述增程器控制策略模块根据tm电机需求功率和车辆状态确定所述整车物理模型中增程器模型的工作状态,若所述增程器模型启动,则再次利用所述增程器控制策略模块中的能量管理策略子模块根据tm电机需求功率、整车车辆状态和增程器模型的工作状态得到增程器目标工作点,基于该工作点最终输出发动机控制信号和isg电机控制信号至所述整车物理模型中的增程器模型,同时,所述增程器控制策略模块将所述增程器的工作状态及增程器目标工作点反馈至所述整车电驱动控制策略模块;步骤103:利用所述整车电驱动控制策略模块根据tm电机需求功率、所述增程器的工作状态及增程器目标工作点解析得到tm电机目标扭矩,发送对应tm电机控制信号至所述整车物理模型;步骤104:所述整车物理模型接收来自所述整车电驱动控制策略模块中的tm电机控制信号以及来自所述增程器控制策略模块的发动机控制信号和isg电机控制信号,所述整车物理模型中的增程器模型根据接收的发动机控制信号和isg电机控制信号于目标工作点运行,并输出电流至所述整车物理模型中的动力电池或tm电机;所述tm电机根据tm电机控制信号,输出扭矩驱动车辆行驶,至此仿真测试完毕。
17.与现有技术相比,本发明具有以下优点:(1)本发明采用的是一种集成软件仿真测试和hil测试的整车控制策略测试系统。首先基于matlab/simulink建立整车物理模型与整车控制策略模型,完成软件仿真测试;之后将建立的仿真模型刷写于整车控制器,应用整车控制器hil测试验证整车控制策略。使用此方法对整车控制策略进行测试,成本低、效率高,同时可验证整车控制策略的实时性。
18.(2)本发明集成整车物理模型和整车控制策略模型于同一个控制器中并完成hil测试,该控制器支持ccp协议,可以通过inca等上位机软件实时监控整车控制策略参数和整车物理模型参数。使用此方法减少了整车物理模型商业实时控制器及其上位机软件,节约了成本。
19.(3)控制策略和物理模型可基于模型建模,修改方便;可以同时编译模型刷写至控制器,减少编译步骤;物理模型和整车控制策略统一特征参数统一命名,可同时更改,避免参数不同步。
附图说明
20.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
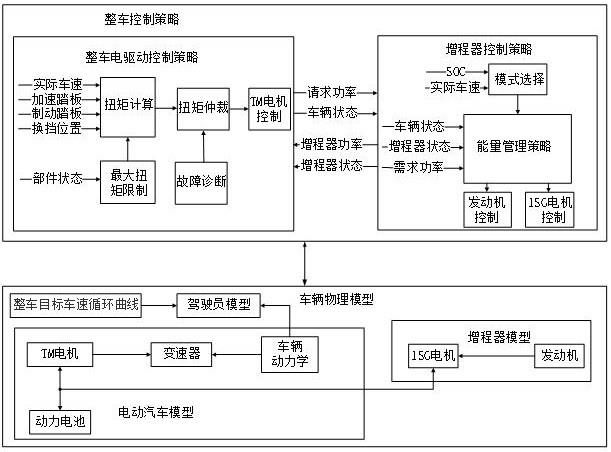
21.图1为本发明一种基于硬件在环的混合动力整车控制策略测试系统的示意图;图2为本发明控制器整车模型示意图;图3为本发明仿真测试模型工作过程流程图。
22.图4为本发明仿真测试车速结果图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
24.增程器开发阶段需要进行整车控制策略测试及验证,但是目前常用的hil仿真测试系统etas和dspace的测试设备价格高昂,测试成本高。
25.本发明提供了一种硬件在环整车控制策略仿真测试系统,包括:整车控制器、负载箱、can总线工具和上位机,测试系统如图1所示。此系统工作时,整车控制器同时运行整车控制策略和整车物理模型,负载箱提供整车控制器所需的硬件接口输入信号、输出控制信号并通过指示灯指示信号状态。can总线工具支持上位机和整车控制器的通讯,在测试过程中检测信号和标定软件。
26.整车控制器包括:整车物理模型和整车控制策略模型,整车物理模型与整车控制策略模型通过总线交互信号,如图2所示。整车物理模型包括:整车目标车速循环曲线模块、驾驶员模型、电动汽车模型和增程器模型。电动汽车模型包括:车辆动力学模型、变速器模型、tm电机模型、动力电池模型。增程器模型包括:isg电机模型和发动机模型。整车控制策略模型包括:整车电驱动控制策略模型和增程器控制策略模型,分别控制电动汽车模型中的tm电机模块和增程器模型。
27.如图3所示,整车物理模型和整车控制策略模型组成的仿真测试模型的工作过程如下:1、整车物理模型根据目标车速和实际车速差值通过pid控制输出油门踏板信号和制动踏板信号、实际车速、部件状态等信号至整车电驱动控制策略模块。整车电驱动控制策略模块根据踏板信号等解析tm电机需求功率,并将tm电机需求功率信号传递给增程器控制策略模块。
28.2、增程器控制策略模块根据tm电机需求功率和车辆状态(soc、车速等信息),确定增程器工作状态。若增程器启动,能量管理策略模块根据tm电机需求功率、整车状态、增程器状态计算增程器目标工作点,最终输出发动机控制信号和isg电机控制信号给整车物理模型中的增程器模型。同时,增程器控制策略模块将计算后的增程器状态及增程器目标功率反馈给整车电驱动模块。
29.3、整车电驱动控制策略模块根据tm电机需求功率、增程器状态和目标功率等信息解析出tm电机目标扭矩,发送tm电机控制信号至整车物理模型。
30.4、整车物理模型接收来自整车电驱动控制策略中的tm电机控制信号以及来自增程器控制策略的发动机控制信号和isg电机控制信号。增程器模型根据接收的发动机控制信号和isg电机控制信号运行在目标工作点,并输出电流至动力电池或tm电机;tm电机物理模型根据tm电机控制信号,输出扭矩驱动车辆行驶。
31.如图4所示,本发明仿真测试需求车速和仿真测试车速结果,仿真结果能够控制车辆根据需求车速运行。
32.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1