一种水面无人艇远程控制系统
1.本发明涉及一种水面无人艇远程控制系统。
背景技术:
2.水面无人艇(unmanned surface vehicles,usv)可以通过艇上智能控制系统与远程无线遥控系统配合实现手动操控和自主航行功能。水面无人艇又可以看作是一个在水面上执行任务的智能机器人,可以根据不同的需求搭载相应的功能模块,构成拥有特定功能的机器人,代替我们执行多种任务。水面无人艇具有机动性强、隐身性能好、成本低等特点,其在民用与军用上都具有重要作用,则逐步成为海上危险领域有人平台的代替和补充,因此无人艇受到越来越广泛的关注。为了提高水面无人艇的可靠性,其对应的无人船控制技术还有很大提升空间。
技术实现要素:
3.本发明为解决上述技术问题,提出一种水面无人艇远程控制系统,包括艇载控制子系统和岸基网络控制子系统,其中,
4.所述艇载控制子系统包括控制器、通讯终端设备和移动网络设备。所述控制器控制推进电机和数字舵机,并采集和处理导航数据。所述控制器和通讯终端设交互。所述通讯终端通过网络连接云服务器和所述移动网络设备。
5.所述岸基网络控制子系统安装在所述移动网络设备上,包括usv网络监控界面,所述usv网络监控界面包括无人艇电池组、推进系统、航行海况、usv位置的实时及历史运行数据。
6.本发明通过在水面无人艇上搭载艇载控制子系统和岸基网络控制子系统,从而实现使用者在远程通过移动设备即可准确控制无人艇,还能够随时查看无人艇的各种实时及历史运行数据,提高了无人艇的可靠性和便利性。
7.优选的,所述岸基网络控制子系统包括dsp控制器和arm控制器。所述dsp控制器和arm控制器通过rs-232进行数据信息的交互。
8.优选的,所述dsp控制器采用tms32f2812型号。所述arm控制器采用stm32h743型号,采集惯导和雷达数据,并对数据进行处理计算和分析。
9.优选的,所述dsp控制器读取所述推进电机、数字舵机以及电池组的电压电流数据信息,对采集的数据信息进行融合处理,并通过脉冲宽度调制的方式对推进电机和数字舵机进行控制。
10.优选的,无人艇搭载惯性导航系统,所述惯性导航系统测定usv位置、航向、艏向、滚动角、俯仰角数据。所述arm控制器对惯性导航系统的数据进行处理和计算,获得无人艇的转向以及转速,从而得出控制指令,并将所述控制指令传输给所述dsp控制器,以对无人艇进行运动控制和路径跟踪。
11.优选的,所述通讯终端与云服务器进行usv任务信息和状态信息的双向传输,具有
usv测速和位置坐标定位功能。
12.优选的,所述通讯终端包括台式计算机、笔记本电脑、平板电脑和手机。
13.优选的,所述岸基网络控制子系统基于4g移动通信技术,以阿里云服务器、web服务器、apache服务器、mysql数据库为基础。
14.优选的,所述岸基网络控制子系统包括客户界面,所述客户界面由html和javascript编写完成。所述客户界面的后台脚本程序实现cgi功能,以实现web浏览器和web服务器的交互。所述web浏览器接收web服务器发送的html代码并逐条解释成网页后显示,显示的信息包括usv的电池组信息、雷达信息、视频画面、电子海图、运动状态。
15.优选的,所述控制器给定的运动控制指令与usv反馈回来当前的航向及航速的偏差通过模糊pid调节,消除误差,得出需要转舵的方向和航速,从而对无人艇航行进行控制。
16.由上述对本发明的描述可知,本发明通过在水面无人艇搭载艇载控制子系统和岸基网络控制子系统,从而实现使用者在远程通过移动设备即可准确控制无人艇,还能够随时查看无人艇的各种实时及历史运行数据,提高了无人艇的可靠性和便利性。
附图说明
17.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
18.其中:
19.图1是水面无人艇运动控制系统架构;
20.图2是数字舵机;
21.图3是水面无人艇岸基网络控制中心;
22.图4是无人艇航行运动控制流程图;
23.图5是usv速度测试图;
24.图6是usv运动轨迹图。
具体实施方式
25.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚、明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
26.一种水面无人艇远程控制系统,包括艇载控制子系统和岸基网络控制子系统,能够搭载在水面无人艇上。
27.本实施例中,水面无人艇远程控制系统对应的硬件包括控制处理模块、直流无刷电机、数字舵机、dtu/gps、锂电池组能量管理系统(bms)、惯性导航模块、毫米波雷达、监控摄像头等。其中,bms主要负责采集锂电池组当前荷电状态下的温度、电压、电流、soc等信息。惯性导航系统用于精准测定usv位置、航向、艏向、滚动角、俯仰角数据。毫米波雷达主要探测usv四周环境内疑似障碍物距水面无人艇的方位、移动速度、距离(最大探测距离40m)等信息。监控摄像头有两台,用于观察usv周围水域状况,一台安装于usv甲板前方的壁挂式摄像头观察usv前方水域环境,一台安装在usv甲板尾部的球型摄像机(360
°
全回转)用于监控无人艇后方及两侧水域环境。
28.所述艇载控制子系统包括控制器、通讯终端设备和移动网络设备。所述控制器控制推进电机和数字舵机,并采集和处理导航数据。所述控制器和通讯终端设交互。所述通讯终端通过网络连接云服务器和所述移动网络设备,优选的,所述通讯终端包括台式计算机、笔记本电脑、平板电脑和手机。
29.本实施例中,所述控制器包括dsp控制器和arm控制器。所述dsp控制器和arm控制器通过rs-232进行数据信息的交互。
30.如图1所示,所述dsp控制器采用tms32f2812型号,具有2个时间管理器ev模块共可产生4路独立的pwm波形和6对12路互补的pwm波形、1个adc采样模块、2路串口通信接口sci、1路局域网通信控制器can总线接口,用来读取推进电机、数字舵机以及电池的电压电流等数据信息,对采集的数据信息进行融合处理,并通过脉冲宽度调制的方式对直流无刷电机和数字舵机进行控制,从而实现对无人艇运动速度和运动方向的控制。所述arm控制器采用stm32h743型号,stm32h743内核基于32位cortex-m7内核,内置双精度fpu及l1缓存,最高主频400mhz,采集惯导和雷达数据,并对数据进行处理计算和分析,得出无人艇的转向以及转速,得出控制指令,通过rs-232传输给tms32f2812,从而实现无人艇的路径跟踪。本实施例中,惯导系统采集的无人艇位置状态信息通过通用同步异步收发器(usart)配置成rs-485通信方式与arm进行数据交互。
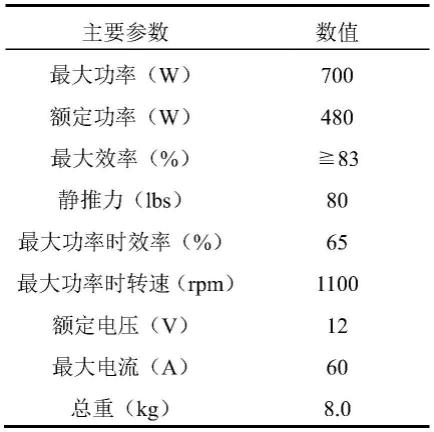
31.该无人艇采用的直流无刷电机相关参数见表1,数字舵机(如图2)额定电压为12v-24v/dc,额定功率为95w。
32.表1
[0033][0034]
本实施例中,所述tms32f2812和stm32h743通过rs-232进行数据信息的交互,tms32f2812与通讯终端设备(dtu)通过rs-232实现上位机与下位机之间的交互,所述通讯终端设备通过4g移动通信网络与阿里云服务器建立连接,可使用台式计算机、笔记本电脑、平板电脑和手机等移动网络设备访问水面无人艇的网络控制界面,对无人艇进行运动控制和状态监测。
[0035]
本实施例中,远程控制由通讯终端设备(dtu)与web服务器进行连接,实现usv的任务信息和状态信息的双向传输,同时具有usv测速和位置坐标定位功能,实现无线通信。
[0036]
在其他实施例中,无人艇的航行运动控制流程如图4所示,给定的运动控制指令与
usv反馈回来当前的航向、航速的偏差γ和μ通过模糊pid调节,消除误差,得出需要转舵的方向和航速,从而对无人艇航行进行控制。
[0037]
所述岸基网络控制子系统安装在所述移动网络设备上,包括usv网络监控界面,所述usv网络监控界面包括无人艇电池组、推进系统、航行海况、usv位置的实时及历史运行数据。
[0038]
本实施例中,所述岸基网络控制子系统主要以阿里云服务器、web服务器、apache服务器、mysql数据库为基础,基于4g移动通信技术,设计开发usv网络监控界面,能够对无人艇电池组、推进系统状态、航行海况、usv位置进行实时监控,用户可以直观获取当前以及历史运行数据。
[0039]
选用mysql,是因为mysql操作简单,占用体积小,方便调用并能够提供多种编程接口,且mysql以表格的形式存储数据,访问速度快,灵活度较高,有效防止数据冗余。另外,mysql还能够通过自身的权限访问控制机制限制用户访问,保证所存储数据的安全。因此,选用mysql作为后端数据库,用于存储无人艇航行数据,作为岸基网络控制子系统的数据存储中心,不仅起到了数据存储的作用,还可提供逻辑运算。
[0040]
apache服务器功能是提供网上信息浏览服务。当客户端向apache服务器管理的html静态网页文件发起文件请求,apache服务器接受到该请求并在相关目录下寻找这个html网页文件,然后将结果反馈至客户端浏览器,附带的文本类型信息会指示浏览器该如何查看文件。
[0041]
云服务器采用阿里云ecs服务器,ecs服务器是基于阿里云飞天操作系统的云服务器,可根据用户需求提供弹性可伸缩的计算服务。
[0042]
dtu与ecs的数据交换是基于因特网的tcp协议格式完成,需配置dtu拨号参数、云服务器ip地址、串口波特率和端口号等工作参数。dtu上电工作后,首先读取内部flash中保存的工作参数,dtu登录gprs网络,进行ppp拨号,获得一个由移动随机分配的内部ip网络。云服务器的web服务器收到dtu的tcp通信请求并响应请求,需向dtu返回请求成功字符,则dtu与web服务器连接成功,称为socket套接字连接。
[0043]
优选的,所述usv网络监控界面包括客户界面,所述客户界面由html和javascript编写完成。所述客户界面的后台脚本程序主要实现cgi功能。cgi(common gateway interface)是外部扩展应用程序与web服务器交互的一个标准接口。web服务器通过调用cgi程序实现和web浏览器的交互,即cgi程序接收web浏览器发送给web服务器的信息并进行处理,将响应结果再回送给web浏览器。当浏览器收到apache服务器发来的html代码后,逐条解释成网页,在客户端浏览器显示usv的电池组信息、雷达信息、视频画面、电子海图、运动状态等信息,完成平台所需的人机交互功能。
[0044]
或者,平台设计针对所有用户,结合对usv监测与控制的功能需求,前端人机交互设计由五个功能界面组成,分别是usv监控界面、usv控制界面、蓄电池组信息界面、雷达数据界面、历史航行纪录界面,如图3所示,水面无人艇岸基控制中心运动控制和数据分析界面,可以对usv的航速和航向进行远程手动控制,并实时显示蓄电池状态信息、usv运动状态信息。
[0045]
以下是无人艇的实时测试:
[0046]
usv远程通讯实时性测试:水面无人艇在远程人工控制模式下航行时,需要经常向
usv发出控制指令,dtu通过4g移动网络与岸基控制中心与建立数据交互。因此,控制指令能否实时下达是手动控制的关键。如表2所示,分别在不同地点对通讯响应时间进行了测试。测试结果表明:岸基网络控制中心与船载设备之间的通讯延迟时间短,在150km距离市区和近海范围内,控制指令延迟时间在1s以下,能够满足基本控制要求。
[0047]
表2远程控制实时性测试
[0048][0049]
usv实时加速性能测试:航向、航速控制是usv运动控制的基础和关键。本系统所选用的推进电机为直流无刷电机,最大转速1100r/min,将电机转速划分为四个档位:ds、s、h、f,分别对应四个航速,如图5所示。
[0050]
由图5可得,水面无人艇在不同电机转速下的加速和航速保持性能。当速度为f档时,电机转速1100r/min,usv在3.2s加速到最大速度9.3km/h,并能保持船速稳定航行,如表3所示。
[0051]
表3推进性能测试数据
[0052][0053]
上述测试结果表明:本文采用自适应模糊pid控制方法可以有效地控制无人艇的运动,能够根据远程运动控制指令较好地校准和稳定航速,使无人艇远程运动控制更具精确性。
[0054]
usv远程控制下回转性能测试:无人艇的主要设计参数如表4所示,根据无人艇的主要参数,为了验证usv远程运动控制的灵敏性和可操作性,本文分别对设定航速、转舵角度下的巡回半径进行了测试,取舵角范围[-60
°
,+60
°
]。在远程运动控制测试中,由于没有航行轨迹绘制图,所以测试完成后需要对mysql数据库存储数据进行分析。根据mysql数据库存储的航行数据,通过matlab坐标转化运算,结合航速和航向大小变化在地图上进行数据拟合得到usv运动轨迹图,如图6所示。
[0055]
表4无人艇设计参数
[0056][0057][0058]
给定usv一定航速v,在满足usv横倾角小于15
°
的情况下,待船速达到稳定后,舵角逐渐增加到一定度数,可以得到不同船速下的可巡回的最小半径航行轨迹。以此方法可得不同给定航速、航向下的巡回半径,如表5所示。表中,当船速v=9km/h,舵角时,船舶横倾角大于15
°
,此时可能由于倾斜过大从而使得海水进入船体,故没有进行测试。
[0059]
表5巡回半径表
[0060][0061]
测试结果表明:本文研制的小型吊舱式推进装置能够满足水面无人艇的远程运动控制要求,验证了不同航速下usv转舵的灵活性、可操作性以及远程控制的实时性。
[0062]
本发明通过在水面无人艇上搭载艇载控制子系统和岸基网络控制子系统,从而实现使用者在远程通过移动设备即可准确控制无人艇,其远程运动控制方式具有较好的实时性、操作性、稳定性、实用性和推广性。
[0063]
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1