一种内河远程控制船舶电子电气系统
1.本发明涉及船舶技术领域,尤其涉及一种内河远程控制船舶电子电气系统。
背景技术:
2.随着物联网时代的到来,船舶逐渐向智能化、网联化发展,船舶上的功能越来越复杂,导致执行器、传感器、控制器越来越多。传统的分布式电子电气架构以及划分功能域的电子电气架构都面临着很多问题:第一,绝大部分功能对应的传感器、执行器和控制器分散在船舶的不同区域,需要分散通信和供电,这种模式会导致线束重量、成本上的压力问题;第二,跨域功能的增长、各控制部件总线通信需求的增长,导致传统总线带宽不够、负载过高、通信时延不满足要求等问题;第三,软件功能大面积分散,导致船舶功能复用度低,升级困难。
3.以上问题,随着智能网联技术在船舶领域的应用发展愈发明显,对智能船舶快速走向市场带来了阻碍。随着芯片处理能力的提升,以及以太网技术的快速发展,传统的分布式电子电气架构已经逐步向新一代集中式电子电气架构发展。现有技术中船舶的电子电气架构一般是按整船的功能特性划分为几个功能域,一般划分为驾驶台控制域,动力控制域,机舱控制域,信息娱乐域等。每个功能域的执行器和传感器通过总线或者硬线连接到该域对应的控制器中,而传感器、执行器和控制器分散在整船各个位置,最终导致整船线束连接十分复杂,线束长度重量和成本都不理想。因此,如何高效简单地进行船舶电气架构的部署是亟待解决的问题。
技术实现要素:
4.有鉴于此,有必要提供及一种内河远程控制船舶电子电气系统,用以克服现有技术中难以高效部署船舶电气架构的问题。
5.为了解决上述技术问题,本发明提供一种内河远程控制船舶电子电气系统,包括中央计算平台、供电系统、无线通信模块、至少一个区域控制器以及以太网传输骨干网络,其中,所述中央计算平台分别与所述无线通信模块、所述至少一个区域控制器、所述供电系统电连接,所述至少一个区域控制器分别与对应的执行器和传感器通信连接,且与所述供电系统电连接,所述至少一个区域控制器和所述中央计算平台通过所述以太网传输骨干网络通信连接。
6.进一步地,所述供电系统包括电池组和不间断电源,其中,所述电池组与所述不间断电源电连接,所述不间断电源分别与所述中央计算平台、所述至少一个区域控制器电连接。
7.进一步地,所述至少一个区域控制器包括船艏区域控制器、驾驶台区域控制器、甲板区域控制器、机舱区域控制器以及船尾区域控制器,并通过100base-t1的对线系统连接至所述中央计算平台。
8.进一步地,所述至少一个区域控制器内置保险丝、高边开关、继电器,并配置了can
接口、lin接口、lvds接口、以太网接口以及电气接口。
9.进一步地,所述无线通信模块内置4g/5g通信模块和卫星通信模块,通过所述以太网传输骨干网络连接到所述中央计算平台。
10.进一步地,所述中央计算平台内置以太网交换芯片,所述以太网交换芯片具备若干路端口。
11.进一步地,在所述太网交换芯片中,6路固定的100m端口,用于与所述至少一个区域控制器、所述无线通信模块以百兆以太网连接,构成所述以太网骨干网络,2路配置端口预留出来,接入其他模块或设备。
12.进一步地,所述中央计算平台内置多个处理器。
13.进一步地,所述至少一个域控制器以can总线和/或lin总线和/或lvds总线连接区域内的执行器和传感器。
14.进一步地,所述至少一个域控制器通过can总线与第一预设数据量交互的执行器和传感器通信连接,所述至少一个域控制器通过lin总线与开关类、机械传感器及简单执行器通信连接。
15.与现有技术相比,本发明的有益效果包括:通过设置区域控制器连接各自区域的传感器、执行器的连接结构,进行相应的信号触发和传递;通过设置中央计算平台与区域控制器的连接结构,对区域控制器传递的信号进行相应的处理;供电系统为中央计算平台和多个区域控制器提供电源分配和保护,并通过区域控制器对域内的传感器、执行器进行电信号的传递,实现供电控制;无线通信模块实现船舶与远程控制中心的通信;区域控制器通过以太网骨干网与中央计算平台交互数据,并实现各区域传感器数据采集和执行器驱动,同时区域控制器也作为该区域电气分配中心,集中给区域内各电器件供电。综上,本发明使整船分散的电器件通过就近的区域控制器集中通信和供电,降低线束重量及成本;同时,功能算力的集中化可减少控制器数量,提升架构的可拓展性和系统升级的便捷性。
附图说明
16.图1为现有技术中的电子电气架构的系统结构图;
17.图2为本发明提供的内河远程控制船舶电子电气系统一实施例的系统结构图;
18.图3为本发明提供的内河远程控制船舶电子电气系统一实施例的具体系统结构图;
19.图4为本发明提供的内中央计算平台和区域控制器一实施例的系统结构图。
具体实施方式
20.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
21.在本发明的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。此外,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
22.在本发明的描述中,提及“实施例”意味着,结合实施例描述的特定特征、结构或特
性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,所描述的实施例可以与其它实施例相结合。
23.本发明提供了一种内河远程控制船舶电子电气系统,通过中央计算平台、供电系统、无线通信模块、至少一个区域控制器以及以太网传输骨干网络的连接结构,为进一步提高船舶架构管理的高效性提供了新思路。
24.在实施例描述之前,对相关词语进行释义:
25.域控制器:是指在“域”模式下,至少有一台服务器负责每一台联入网络的电脑和用户的验证工作,相当于一个单位的门卫一样,称为域控制器。域控制器(domain controller,dc)是活动目录的存储位置,安装了活动目录的计算机称为域控制器。在第一次安装活动目录时,安装活动目录的那台计算机就成为域控制器,简称“域控”。域控制器存储着目录数据并管理用户域的交互关系,其中包括用户登录过程、身份验证和目录搜索等。一个域可以有多个域控制器。为了获得高可用性和容错能力,规模较小的域只需两个域控制器,一个实际使用,另一个用于容错性检查;规模较大的域可以使用多个域控制器。
26.基于上述技术名词的描述,结合图1来看,图1为现有技术中的电子电气架构的系统结构图,现有技术中,往往控制器数量众多,整船线束重量和成本较高。因而,本发明旨在提出优化远程控制船舶的电子电气架构,降低整船线束重量和成本,并使之满足网络通信带宽要求以及功能拓展、升级便利性的要求。
27.以下分别对具体实施例进行详细说明:
28.本发明实施例提供了一种内河远程控制船舶电子电气系统,结合图2来看,图2为本发明提供的内河远程控制船舶电子电气系统一实施例的系统结构图,包括中央计算平台101、供电系统104、无线通信模块102、至少一个区域控制器103以及以太网传输骨干网络,其中,所述中央计算平台101分别与所述无线通信模块102、所述至少一个区域控制器103、所述供电系统电连接104,所述至少一个区域控制器103分别与对应的执行器和传感器105通信连接,且与所述供电系统104电连接,所述至少一个区域控制器103和所述中央计算平台101通过所述以太网传输骨干网络通信连接。
29.在本发明实施例中,通过设置区域控制器连接各自区域的传感器、执行器的连接结构,进行相应的信号触发和传递;通过设置中央计算平台与区域控制器的连接结构,对区域控制器传递的信号进行相应的处理;供电系统为中央计算平台和多个区域控制器提供电源分配和保护,并通过区域控制器对域内的传感器、执行器进行电信号的传递,实现供电控制;无线通信模块实现船舶与远程控制中心的通信;区域控制器通过以太网骨干网与中央计算平台交互数据,并实现各区域传感器数据采集和执行器驱动,同时区域控制器也作为该区域电气分配中心,集中给区域内各电器件供电。
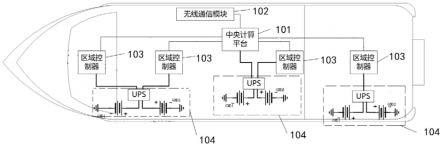
30.作为优选的实施例,结合图3来看,图3为本发明提供的内河远程控制船舶电子电气系统一实施例的具体系统结构图,所述供电系统104包括电池组和不间断电源,其中,所述电池组与所述不间断电源电连接,所述不间断电源分别与所述中央计算平台101、所述至少一个区域控制器103电连接。
31.在本发明实施例中,供电系统104包含若干电池组及ups,将邻近的两组电池接入一台ups,通过ups向附近的区域控制器103或中央计算平台101供电;通过多组电池和ups提
供稳定、不间断的电力供应,确保供电的可靠性。
32.需要说明的是,结合图4来看,图4为本发明提供的内中央计算平台和区域控制器一实施例的系统结构图,供电系统104为中央计算平台101和区域控制器103提供电源分配和保护。区域控制器通过一根电源导线由邻近ups进行供电,它作为该区域的电气分配中心,内置具有保护和诊断功能的保险丝、高边开关、继电器,给区域内所有电器件提供电源分配和保护,并满足该区域所有电器件的供电需求。电器件遵从就近原则从各自区域控制器中接电源导线。
33.在本发明一个具体的实施例中,所述供电系统包含若干电池组及ups,将邻近的两组电池接入一台ups,通过ups向附近的区域控制器或中央计算平台供电;通过多组电池和ups提供稳定、不间断的电力供应,确保供电的可靠性。
34.作为优选的实施例,仍结合图4来看,所述至少一个区域控制器包括船艏区域控制器1031、驾驶台区域控制器1032、甲板区域控制器1033、机舱区域控制器1034以及船尾区域控制器1035,并通过100base-t1的对线系统连接至所述中央计算平台。
35.在本发明实施例中,按照船舶上的物理区域进行划分,分为船艏区域控制器、驾驶台区域控制器、甲板区域控制器、机舱区域控制器、船尾区域控制器,这些区域控制器以100base-t1连接到中央计算平台。区域控制器的分布和数量可以按照实际船舶的构造进行调整。
36.作为优选的实施例,所述至少一个区域控制器内置保险丝、高边开关、继电器,并配置了can接口、lin接口、lvds接口、以太网接口以及电气接口。
37.在本发明实施例中,区域控制器以can/lin/lvds总线连接区域内执行器和传感器,并将传感器的数据集中起来通过以太网报文传输给中央计算平台,中央计算平台对数据进行处理并发送至远程控制中心;同时,中央计算平台通过无线通信模块接收远程控制信息,然后通过以太网报文传输给区域控制器,由区域控制器驱动执行器完成控制命令。
38.作为优选的实施例,所述无线通信模块内置4g/5g通信模块和卫星通信模块,通过所述以太网传输骨干网络连接到所述中央计算平台。
39.在本发明实施例中,通过设置4g/5g通信模块和卫星通信模块,进行通信信号的传递。
40.作为优选的实施例,所述中央计算平台101内置以太网交换芯片,所述以太网交换芯片具备若干路端口。
41.在本发明实施例中,在中央计算平台内置以太网交换芯片,以构建以太网骨干网络。
42.在本发明一个具体的实施例中,所述无线通信模块实现船舶与远程控制中心的通信,其内部集成4g/5g通信模块和卫星通信模块;无线通信模块通过以太网连接到中央计算平台;
43.其中,无线通信模块用于将中央计算平台从区域控制器接收到的船舶数据信息发送给远程控制中心,以及接收远程控制中心发来的控制命令,并将控制命令传输给中央计算平台。
44.作为优选的实施例,在所述太网交换芯片中,6路固定的100m端口,用于与所述至少一个区域控制器103、所述无线通信模块102以百兆以太网连接,构成所述以太网骨干网
络,2路配置端口预留出来,接入其他模块或设备。
45.在本发明实施例中,中央计算平台是1台高性能计算机,负责整船功能的控制逻辑和算法的集中实现。该计算机内置以太网交换芯片,芯片具备8路端口,其中6路固定的100m端口,用于与区域控制器和无线通信模块以百兆以太网连接,构成整个架构拓扑结构的以太网骨干网络,2路可配置端口预留出来,方便接入其他模块或设备。
46.作为优选的实施例,所述中央计算平台101内置多个处理器。
47.在本发明实施例中,通过中央计算平台将功能集中化,整船功能相关软件主要分布在中央计算平台中,便于进行功能升级和软件更新。
48.在本发明一个具体的实施例中,中央计算平台布置在整船中心位置,方便部署线束。中央计算平台负责整船功能的控制逻辑和算法的集中实现。采用1台高性能计算机,内置mpu和μc处理器,μc运行实时操作系统,处理实时性要求高的功能。mpu上通过hypervisor技术实现多套操作系统(linux,android)共享硬件资源,一机多屏。
49.中央计算平台系统与区域控制器之间以百兆以太网连接,构成整个架构拓扑结构的骨干网络。相对于低速的can总线为骨干网的网络,以太网为骨干网,能解决当前远程控制船舶不同应用场景下对带宽和速率的需求。同时,通过中央计算平台将功能集中化,整船功能相关软件主要分布在中央计算平台中。功能升级时只需刷新中央计算平台上的软件即可完成升级。增加船舶功能时,只需升级中央计算平台中所增加功能对应的软件代码,必要时在区域控制器的总线上接入对应的设备,无需更改整个架构。
50.作为优选的实施例,所述至少一个域控制器103以can总线和/或lin总线和/或lvds总线连接区域内的执行器和传感器105。
51.在本发明实施例中,通过区域控制器对区域内所有电器件信号进行集中式通信,以及区域控制器作为该区域的电气分配中心为电器件就近供电,减少了整船线束重量及成本。
52.作为优选的实施例,所述至少一个域控制器103通过can总线与第一预设数据量交互的执行器和传感器105通信连接,所述至少一个域控制器103通过lin总线与开关类、机械传感器及简单执行器通信连接。
53.在本发明实施例中,区域控制器和中央计算平台之间采用高带宽的以太网设计,实现域间大数据量的交互和传输。域内则根据通信需求,对于高数据量交互设备采用以太网通信方案,对于普通数据量交互设备采用can通信方案。对于开关类、机械传感器及简单执行器等,采用lin总线实施通信。通过这种方式合理分配通信资源,并且满足低时延的交互系统。
54.在本发明一个具体的实施例中,5个区域控制器按照船舶上的物理区域进行划分,分为船艏区域控制器、驾驶台区域控制器、甲板区域控制器、机舱区域控制器、船尾区域控制器,这些区域控制器以100base-t1连接到中央计算平台。区域控制器以can/lin/lvds总线连接区域内执行器和传感器,并将传感器的数据集中起来通过以太网报文传输给中央计算平台进行处理,中央计算平台通过无线通信模块将信息发送至远程控制中心;中央计算平台通过无线通信模块接收远程控制中心的控制信息,然后将该信息用以太网报文传输给区域控制器,由区域控制器驱动执行器完成控制命令;
55.其中,船艏区域控制器通过100base-t1连接至中央计算平台。船艏摄像头、航海雷
达、激光雷达、毫米波雷达通过lvds连接至船艏区域控制器,照明灯通过lin连接到船艏区域控制器;
56.其中,驾驶台区域控制器通过100base-t1连接至中央计算平台。驾驶台摄像头通过lvds连接到驾驶台区域控制器;喇叭、vhf、ais、驾驶模式切换器、电子航道图、号灯号型、高精度定位器、风速风向仪通过lin总线连接到驾驶台区域控制器;
57.其中,甲板区域控制器通过100base-t1连接至中央计算平台。电子水尺、测深仪、电子倾斜仪、装载仪、货舱温度湿度计、货舱液位计、压载舱液位计、舱门开闭传感器、灯通过lin连接到甲板区域控制器;左舷摄像头、右舷摄像头通过lvds连接到甲板区域控制器;
58.其中,机舱区域控制器通过100base-t1连接至中央计算平台。消防系统、油污水舱液位计、发电机、冷却系统、润滑系统、机械通风系统、锚机系统通过can总线连接到机舱区域控制器;机舱摄像头通过lvds连接到机舱区域控制器;燃油舱液位计、管系系统通过lin总线连接到机舱区域控制器;
59.其中,船尾区域控制器通过100base-t1连接至中央计算平台。尾灯、尾气监测仪通过lin总线连接到船尾区域控制器,船尾摄像头通过lvds连接到船尾区域控制器;
60.其中,区域控制器和中央计算平台之间采用高带宽的以太网设计,实现域间大数据量的交互和传输。域内则根据通信需求,对于高数据量交互设备采用以太网通信方案,对于普通数据量交互设备采用can通信方案。对于开关类、机械传感器及简单执行器等,采用lin总线实施通信。通过这种方式合理分配通信资源,并且满足低时延的交互系统;
61.其中,以甲板区域控制器为例,它布置在船舶上甲板区域的中部位置,连接电子水尺、测深仪、电子倾斜仪、装载仪、货舱温度湿度计、货舱液位计、左舷摄像头、右舷摄像头、压载舱液位计、舱门开闭传感器等设备,这些设备通过甲板区域控制器将信息传递给中央计算平台进行信息共享,中央计算平台对收到的信息进行处理,并通过无线通信模块发送给远程控制中心。船舶通过无线通信模块与远程控制中心进行通信。无线通信模块接收到远程控制命令后,通过以太网传输给中央计算平台,中央计算平台通过以太网将控制命令传输给对应的区域控制器,由区域控制器进行驱动执行;
62.其中,区域控制器作为该区域的电气分配中心,负责给区域内所有电器件提供电源分配和保护,并满足该区域所有电器件的供电需求。区域控制器内置具有保护和诊断功能的保险丝、高边开关、继电器,并配置了can接口、lin接口、lvds接口、以太网接口以及电气接口。电器件遵从就近原则从各自区域控制器中接电源导线。区域控制器既连接和处理该区域所有电器的通信信息,同时也作为该区域的电气分配中心,通过保险丝,高边开关、继电器实现电源分配和保护功能,这种集中式通信且集中式供电设计,有效减少了整船线束重量及成本。
63.本发明公开了一种内河远程控制船舶电子电气系统,通过设置区域控制器连接各自区域的传感器、执行器的连接结构,进行相应的信号触发和传递;通过设置中央计算平台与区域控制器的连接结构,对区域控制器传递的信号进行相应的处理;供电系统为中央计算平台和多个区域控制器提供电源分配和保护,并通过区域控制器对域内的传感器、执行器进行电信号的传递,实现供电控制;无线通信模块实现船舶与远程控制中心的通信;区域控制器通过以太网骨干网与中央计算平台交互数据,并实现各区域传感器数据采集和执行器驱动,同时区域控制器也作为该区域电气分配中心,集中给区域内各电器件供电。
64.本发明技术方案,通过中央计算平台将功能集中化,整船功能相关软件主要分布在中央计算平台中,便于进行功能升级和软件更新;通过以太网骨干网络,中央计算平台与区域控制器之间使用100m/s以太网连接,使拓扑架构满足多种对时延要求较高的场景,如船联网、远程控制船舶;通过区域控制器对区域内所有电器件信号进行集中式通信,以及区域控制器作为该区域的电气分配中心为电器件就近供电,减少了整船线束重量及成本;增加船舶功能时,只需升级中央计算平台中所增加功能对应的软件代码,必要时在区域控制器的总线上接入对应的设备,无需更改整个架构,该架构具有较高的可扩展性使整船分散的电器件。综上,通过就近的区域控制器集中通信和供电,降低线束重量及成本;同时,功能算力的集中化可减少控制器数量,提升架构的可拓展性和系统升级的便捷性。
65.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1