一种巡逻跟踪机器人设计方法及其系统与流程
1.本发明涉及机器人设计技术领域,尤其涉及一种巡逻跟踪机器人设计方法及其系统。
背景技术:
[0002]“创客教育”是创客文化与教育的结合,基于学生兴趣,以项目学习的方式,使用数字化工具,培养跨学科解决问题能力、团队协作能力和创新能力的一种素质教育,创客教具针对的目标群体主要是8岁以上的儿童、青少年,为了提高学生的动手能力,培养发散性思维,创客教具由多种零件组成,用于学生自己动手利用教具拼接成各式各样的机器人。
[0003]
本发明旨在提出一种寓教于乐,以玩具的形式增加学生的学习兴趣,激发学生的好玩心和好奇心,使学生更加愿意动手去学习,提高学生的动手能力的创客机器人。
技术实现要素:
[0004]
本发明的目的在于提供一种巡逻跟踪机器人设计方法及其系统,旨在提出一种一种寓教于乐,以玩具的形式增加学生的学习兴趣,激发学生的好玩心和好奇心,使学生更加愿意动手去学习,提高学生的动手能力的创客机器人。
[0005]
为实现上述目的,本发明提供了一种巡逻跟踪机器人设计方法,包括如下步骤:
[0006]
利用usb设备将机器人主控板和电脑建立连接,进行软件调试;
[0007]
利用机器人的按键模块进行按键,并通过不同的按键次数对比不同的功能模式,分析是否与软件设定值相匹配;
[0008]
在线调试程序,确认软件命令无误后,将软件脚本上传至机器人主控板;
[0009]
断开主控板和电脑的连接,脱机运行,完成巡逻跟踪机器人的设计。
[0010]
其中,在利用usb设备将机器人主控板和电脑建立连接,完成软件调试的步骤中:
[0011]
将usb设备分别插入机器人主控板和电脑的接口后,选择串口,再安装固件,完成连接。
[0012]
其中,在利用机器人的按键模块进行按键,并通过不同的按键次数对比不同的功能模式,分析是否与软件设定值相匹配的步骤中:
[0013]
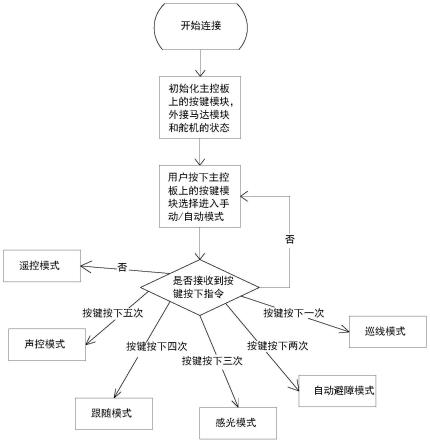
所述功能模式包括遥控模式、巡线模式、自动避障模式、感光模式、跟随模式、声控模式和遥控模式。
[0014]
其中,在利用机器人的按键模块进行按键,并通过不同的按键次数对比不同的功能模式,分析是否与软件设定值相匹配的步骤中:
[0015]
所述遥控模式对应不进行按键,所述巡线模式对应一次按键,所述自动避障模式对应两次按键,所述感光模式对应三次按键,所述跟随模式对应四次按键,所述声控模式对应五次按键。
[0016]
其中,在在线调试程序,确认软件命令无误后,将软件脚本上传至机器人主控板的步骤中:
[0017]
应用程序采用scratch语言进行开发,机器人主控板采用rainbot主控板。
[0018]
其中,在断开主控板和电脑的连接,脱机运行,完成巡逻跟踪机器人的设计的步骤中:
[0019]
脱机工作时,通过双路led灯的状态判断机器人的功能模式。
[0020]
本发明还提供一种巡逻跟踪机器人设计系统,应用于上述所述的巡逻跟踪机器人设计方法,包括控制板、巡线传感器、声音传感器、超声波传感器、环境光传感器和舵机,所述舵机与所述控制板的第一接口连接,所述巡线传感器与所述控制板的第二接口连接,所述声音传感器与所述控制板的第三接口连接,所述超声波传感器与所述控制板的第四接口连接。
[0021]
本发明的一种巡逻跟踪机器人设计方法及其系统,利用usb设备将机器人主控板和电脑建立连接,进行软件调试,利用机器人的按键模块进行按键,并通过不同的按键次数对比不同的功能模式,分析是否与软件设定值相匹配,在线调试程序,确认软件命令无误后,将软件脚本上传至机器人主控板,断开主控板和电脑的连接,脱机运行,完成巡逻跟踪机器人的设计,针对初次接触编程及机器人搭建的用户,本软件已经直接应用于配套机器人的主控板上,不需要用户自己安装相关编程软件,方便用户自行更改组装配套机器人的外形,实现更多的功能。
附图说明
[0022]
为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
[0023]
图1是本发明第一实施例的整体的剖视图。
[0024]
图2是本发明提供的usb连接功能的流程图。
[0025]
图3是本发明提供的主控板按键接收指令功能的流程图。
[0026]
图4是本发明提供的上传、脱机工作功能的流程图。
[0027]
图5是本发明提供的按键次数对应的功能模式图。
[0028]
图6是本发明提供的灯光状态对应的功能模式图。
[0029]
图7是本发明提供的一种巡逻跟踪机器人设计系统的电路原理图。
具体实施方式
[0030]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0031]
请参阅图1-图6,其中图1是,本发明提供一种巡逻跟踪机器人设计方法,包括如下步骤:
[0032]
s1:利用usb设备将机器人主控板和电脑建立连接,进行软件调试;
[0033]
s2:利用机器人的按键模块进行按键,并通过不同的按键次数对比不同的功能模式,分析是否与软件设定值相匹配;
[0034]
s3:在线调试程序,确认软件命令无误后,将软件脚本上传至机器人主控板;
[0035]
s4:断开主控板和电脑的连接,脱机运行,完成巡逻跟踪机器人的设计。
[0036]
其中,在步骤s1中,主板与电脑之间可用usb设备建立连接,连接之前需先选择连
接串口及安装固件,安装无误并建立连接后主板可实时执行软件发布的命令,使用者可随时进行调试、更改软件所包含的命令,流程图如下图2所示,按键次数对应的功能模式图如下图5所示。
[0037]
在步骤s2中,机器人的主控板上集成有按键模块,可以实现读取用户按下的按键次数并对应反馈数据,分析是否与软件设定值相匹配,匹配成功时软件发布相应命令使配套机器人进入指定的功能模式,流程图如下图3所示。
[0038]
在步骤s3中,本控制软件支持在线调试和离线修改,用户在线调试程序完毕,确认软件命令无误,机器人执行正常后,可将软件脚本上传到rainbot主控板,上传成功后配套机器人即可进行脱机工作,流程图如下图4所示。
[0039]
在步骤s4中,是否成功进入所需的功能模式可以根据机器人连接的双路led灯的状态查看,不同灯光状态对应的功能模式对应的双路led灯状态图如图6所示。
[0040]
在本实施方式中,本控制软件为不熟悉机器人和编程的用户提供了可直接通过主控板上按键控制机器人进入不同模式,可通过超声波模块、声音传感器模块、环境光检测模块自动根据环境变化调整工作状态,也可利用红外遥控器控制配套巡逻跟踪机器人完成一系列工作的服务。此外为用户提供了扩展性创造性高,科技感强的配套组装零件和扩展零件供其进行二次创意改造。同时也为想深入学习,有兴趣的用户提供了可通过图形化编程进行二次功能开发的渠道,充分展示了教育机器人的编程思路和编程方法,提高和吸引了参与者学习机器人编程的兴趣。
[0041]
请参阅图7,本发明还提供一种巡逻跟踪机器人设计系统,应用于上述所述的巡逻跟踪机器人设计方法,包括控制板、巡线传感器、声音传感器、超声波传感器、环境光传感器和舵机,所述舵机与所述控制板的第一接口连接,所述巡线传感器与所述控制板的第二接口连接,所述声音传感器与所述控制板的第三接口连接,所述超声波传感器与所述控制板的第四接口连接;所述控制板还设置有控制接口、usb接口、蓝牙模块接口和电池接口,所述控制接口通过蜂鸣器接口与无源蜂鸣器连接,所述巡逻跟踪机器人设计系统还包括环境光传感器和红外遥控接收器,所述环境光传感器和所述红外遥控接收器分别与所述控制接口连接。
[0042]
在本实施方式中,进入巡线模式时,按照规定的路线进行巡逻;进行自动避障模式时,通过所述声音传感器和所述超声波传感器检测周围的声音和物体,使用舵机云台,让超声波可以在180度范围内进行检测;进入感光模式时,利用内置的报警器和所述环境光传感器,晚上巡逻自动开启灯光;进入跟踪模式时,通过超声波检测前面物体,跟踪前面移动的物体,保持一定的距离;前置灯采用4路彩色led设计,后置采用双路彩色led设计;通过所述红外遥控接收器实现红外遥控功能;机器人的车轮采用三角履带设计,运行稳定。
[0043]
针对对深入学习研究编程以及机器人改造有兴趣的用户,可以使用doany1.0平台对本应用软件的程序进行二次开发改造,从而实现更多的动作和功能。所述控制板采用rainbot主控板,具有良好的扩展性,本身已经集成有光线传感器、蜂鸣器、按键模块、led灯等多个传感器,同时也通过外接各类传感器来感知环境,通过控制马达、灯光及其他装置来影响环境。且便捷灵活,易于上手。方便用户自行更改组装配套机器人的外形,实现更多的功能;控制软件能够实现控制配套子航巡逻跟踪机器人所有模式下的动作,包括自遥控、感光、跟随、巡线、自动避障、声控等功能。
[0044]
以上所揭露的仅为本技术一种或多种较佳实施例而已,不能以此来限定本技术之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本技术权利要求所作的等同变化,仍属于本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1