一种分布式卫星编队构形设计与保持一体化迭代优化方法
1.本发明属于编队构形设计与控制技术领域,尤其涉及一种分布式 卫星编队构形设计与保持一体化迭代优化方法。
背景技术:
2.干涉合成孔径雷达(interferometric synthetic apertureradar,insar)是获取三维地表信息和形变测量的关键技术。由于卫 星编队系统可以提供超大观测基线和观测精度,并能灵活调节观测基 线,基于卫星编队的insar技术受到各国的重视,日益成为各国空间 基础设施的重要组成部分。insar卫星编队系统可以提供多尺度观测 基线,可以在观测基线间灵活切换,满足全球全地形高程测量的需求。 insar卫星编队技术中,编队构形设计与保持控制是核心技术。其中 编队构形设计是以观测基线需求为输入,根据卫星相对运动规律设计 相应卫星轨道;编队构形保持控制是由利用执行机构和控制策略保持 预定的卫星轨道的过程。
3.目前的编队构形设计与控制是两个独立的技术环节其中构形设 计通常采用数值迭代优化方法,根据基线目标和安全性、稳定性等约 束试凑最优构形公开了“insar卫星编队构型多约束优化设计方法研 究”;构形保持控制常依据构形受摄发散原理优化最优点火位置和点 火速度增量(参见申请号为cn310192870.9的中国专利,公开了“一 种基于燃料消耗优化的卫星编队构形控制方法”)。但卫星携带燃料 有限,只能采用离散脉冲点火控制实现构型保持,若按照既定基线需 求设计的编队系统会受空间摄动影响而发散,导致观测基线离开最优 观测区间而不可用。即,采用现有设计与控制独立技术方案,会出现 观测基线不可用的区域,影响insar系统对全球全地形覆盖。因此, 亟需一种分布式卫星编队构形设计与保持一体化迭代优化方法。
技术实现要素:
4.本发明的目的在于提出一种分布式卫星编队构形设计与保持一 体化迭代优化方法,获得了观测基线始终可用的编队构形,保证了编 队系统应用效能,大幅提高了观测效率,且计算复杂度低,构形设计 时间短。
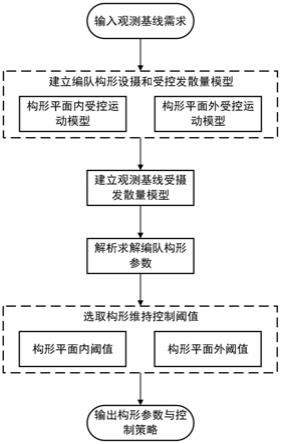
5.为实现上述目的,本发明提供了一种分布式卫星编队构形设计与 保持一体化迭代优化方法,包括以下步骤:
6.根据观测基线需求,构建构形平面内受控运动模型和构建构形平 面外受控运动模型,建立编队构形受摄和受控发散量模型;
7.基于所述编队构形受摄和受控发散量模型建立观测基线受摄发 散量模型;
8.基于所述观测基线受摄发散量模型解析求解编队构形参数;
9.基于所述编队构形参数,根据构形平面内阈值和构形平面外阈值 选取构形维持控制阈值,获得构形参数与控制策略,完成分布式卫星 编队构形设计与保持一体化迭代优化。
10.可选的,构建构形平面内受控运动模型和构建构形平面外受控运 动模型,建立编队构形受摄和受控发散量模型,包括:
11.基于主星轨道坐标系,根据轨道根数差获取分布式卫星编队构形;
12.根据所述分布式卫星编队构形定义新的分布式卫星编队构形向 量,获取编队构形运动学方程和构形维持控制摄动方程;
13.对于平面内构形和平面外构形采用点火脉冲,获取脉冲点火速度 增量和纬度幅角,输入构形维持控制摄动方程中,获得编队构形受摄 和受控发散量模型。
14.可选的,所述分布式卫星编队构形为:
[0015][0016]
其中,rr表示主星轨道坐标系中构形x向尺度,r
t
表示构形y向 尺度,rn表示构形z向尺度;a为构形主星轨道半长轴,f为构形主 星轨道真近点角,ω为主星近地点幅角,δ表示构形主星与从星轨道 参数差。
[0017]
可选的,所述建立观测基线受摄发散量模型包括:根据分布式 sar卫星系统dem测绘和gmti任务需求,编队构形生成dem垂直有 效基线和gmti沿航迹基线,基于所述dem垂直有效基线和所述gmti 沿航迹基线分别建立垂直航迹向发散模型和建立沿航迹向发散模型, 获取垂直航迹向基线最大偏差量和半长轴控制残差最大偏差量。
[0018]
可选的,获取垂直航迹向基线最大偏差量和半长轴控制残差最大 偏差量的计算过程包括:
[0019]bect
=|xsinφ+zcosφ|
[0020]bat
=|y|=|2x+ly|
[0021][0022][0023][0024][0025]
其中,b
ect
为dem垂直有效基线,b
at
为gmti沿航迹基线,φ为 雷达波束投射角,向左边投射取“+”号,向右边投射取
“‑”
号,为构形平面内相位角发散量,δiy构形平面外发散量,δb
ectmax
为垂直 航迹向基线最大偏差量,δb
atmax
为半长轴控制残差最大偏差量。
[0026]
可选的,基于所述观测基线受摄发散量模型解析求解编队构形参 数包括:设定所述观测基线需求,根据所述垂直航迹向基线最大偏差 量和半长轴控制残差最大偏差量与所述观测基线需求进行修正处理 获得目标基线,基于所述目标基线获取解析求解编队构形参数。
[0027]
可选的,获取构形平面内阈值包括:设定构形设计时垂直有效基 线发散量,期望的构形维持控制周期,根据构形平面外幅度发散的垂 直有效基线变化量,获得构形平面内维持控制阈值。
[0028]
可选的,获取构形平面外阈值包括:设定构形沿航迹向发散量, 根据构形平面外幅度发散的垂直有效基线变化量,获取构形平面外阈 值。
[0029]
本发明技术效果:本发明公开了一种分布式卫星编队构形设计与 保持一体化迭代优化方法,通过建立控制能力-基线摄动模型,得到 了定量分析编队控制能力对观测基线摄动影响的方法,解决了编队设 计和编队控制间的耦合影响的问题;通过采用本发明方法,获得了观 测基线始终可用的编队构形,保证了编队系统应用效能,大幅提高了 观测效率,且计算复杂度低,构形设计时间短。
附图说明
[0030]
构成本技术的一部分的附图用来提供对本技术的进一步理解,本 申请的示意性实施例及其说明用于解释本技术,并不构成对本技术的 不当限定。在附图中:
[0031]
图1为本发明实施例分布式卫星编队构形设计与保持一体化迭 代优化方法的流程示意图;
[0032]
图2为本发明实施例垂直有效基线示意图。
具体实施方式
[0033]
需要说明的是,在不冲突的情况下,本技术中的实施例及实施例 中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本 申请。
[0034]
需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算 机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻 辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或 描述的步骤。
[0035]
如图1-2所示,本实施例中提供一种分布式卫星编队构形设计与 保持一体化迭代优化方法,包括以下步骤:
[0036]
根据观测基线需求,构建构形平面内受控运动模型和构建构形平 面外受控运动模型,建立编队构形受摄和受控发散量模型;
[0037]
基于所述编队构形受摄和受控发散量模型建立观测基线受摄发 散量模型;
[0038]
基于所述观测基线受摄发散量模型解析求解编队构形参数;
[0039]
基于所述编队构形参数,根据构形平面内阈值和构形平面外阈值 选取构形维持控制阈值,获得构形参数与控制策略,完成分布式卫星 编队构形设计与保持一体化迭代优化。
[0040]
第一步,建立编队构形受摄和受控发散量模型。首先在主星轨道 坐标系中,利用轨道根数差描述的分布式sar近圆轨道编队构形可以 描述为:
[0041][0042]
其中,rr表示主星轨道坐标系中构形x向尺度,r
t
表示构形y向 尺度,rn表示构形z向尺度;a为构形主星轨道半长轴,f为构形主 星轨道真近点角,ω为主星近地点幅角。δ表示构形主星与从星轨道 参数差。
[0043]
定义新的构形描述向量δα为:
[0044][0045]
其中,无下标表示主星轨道参数,下标d表示构形从星参数。
[0046]
u=ω+f为主星轨道纬度幅角;e
x
=ecosω,ey=esinω,且:
[0047][0048]
简化后可得基于e/i向量描述的编队构形运动学方程为:
[0049][0050]
其中为构形平面内的初始相位; θ=arctan(δiy/δi
x
)为构形平面外的初始相位。
[0051]
接着,如果令δrr=δr
t
=δrn=0,求解后可得用于构形维持控制 的gauss摄动方程为:
[0052]
aδa≈2δv
t
/n
[0053]
aδλ≈-2δvr/n-3(u-um)δv
t
/n
[0054]
aδe
x
≈δvrsinum/n+2δv
t
cosum/n
[0055]
aδey≈-δvrcosum/n+2δv
t
sinum/n
[0056]
aδi
x
≈δvncosum/n
[0057]
aδiy≈δvnsinum/n
[0058]
其中um为构形维持控制点火时的主星纬度幅角。对于平面内构 形维持,采用两次点火脉冲,其速度增量及点火纬度幅角为:
[0059][0060]
δv
r1
=δv
r2
=0
[0061]um1
=u
m2-π=ξ
[0062]
其中ξ=arctan(δey/δe
x
),δe为构形平面内维持控制e向量改变 量。
[0063]
对于平面外构形维持,采用单次点火脉冲,其速度增量及点火纬 度幅角为:
[0064]
δvn=naδi
[0065]um1
=arctan(δiy/δi
x
)
[0066]
其中δi为构形平面外维持控制i向量改变量。将脉冲点火速度增 量和纬度幅角带入gauss摄动方程,即得构形受摄及受控发散量模型。
[0067]
第二步,建立基线受摄发散模型。按分布式sar卫星系统dem测 绘和gmti任务需求,编队构形生成的干涉基线有两种,一是用于dem 的垂直有效基线(effective cross track baseline,图2)b
ect
:
[0068]bect
=|xsinφ+zcosφ|
[0069]
其中,φ为雷达波束投射角,向左边投射取“+”号,向右边投 射取
“‑”
号;二是用于gmti的沿航迹基线(along track baseline) b
at
:
[0070]bat
=|y|=|2x+ly|
[0071]
首先建立垂直航迹向发散模型。在空间摄动力影响下,垂直有效 基线主要受构形径向相位和垂直航迹向δiy受摄变化量的影响。将 两类受摄变化量代入定义式并简化处理后可得:
[0072][0073]
其中,为构形平面内相位角发散量,δiy构形平面外发散量。
[0074]
垂直航迹向基线最大偏差量可以表示为:
[0075][0076]
从上式可知,构形径向发散造成的垂直有效发散量主要由构形平 面内的构形尺度及维持控制周期内造成的相位角偏差决定;构形平面 外发散造成的垂直有效发散量主要由构形平面外的尺度变化量决定。
[0077]
其次建立沿航迹向发散模型。在空间摄动力影响下,沿航迹有效 基线主要受构形径向相位受摄变化量、j2摄动构形沿航迹长期偏移 量δr
r2
、半长轴控制残差造成的沿航迹长期偏移量δr
ra
和大气阻力长 期偏移量δrr的影响。将几类受摄变化量代入定义式并简化处理后可 得:
[0078][0079]
则最大偏差为:
[0080][0081]
从上式可知,沿航迹基线最大偏差量分别由j2摄动造成的构形 平面内周期性偏差量,沿航迹长期漂移量;半长轴控制残差造成的沿 航迹长期漂移量及大气阻力造成的沿航迹长期漂移量三个部分组成。 从构形受摄发散特性量化仿真结果可知,在构形轨道倾角差可控时, 大气阻力及半长轴控制残差造成的长期偏移量为主。
[0082]
第三步,根据修正构形目标,设计构形参数。设观测基线需求为 和修正后的目标基线为:
[0083][0084]
[0085]
解析求解构形参数的方法如下。为满足对称绕飞和自然稳定,需 满足:
[0086]
δa=δλ=0
[0087][0088]
e/i向量描述的相对运动模型改写为:
[0089][0090]
此时需要确定的编队构形参数是r
x
,rz,编队构形设计的目标 是使有效垂直基线b
ect
范围内(a≤b
ect
≤b)所覆盖的纬度带([ua,ub]) 尽可能的大,同时沿航迹向基线不超过设计参数并保 持相对距离不小于安全距离约束(d
safe
≤d
xoz
)。
[0091]
将相对运动方程带入垂直基线模型有:其中,且:此时构形参数由和控制,最优构形满足。受单构形垂直有效基线可观测比例的限制,为实现编队构形高测绘效率,减少构形数目,垂直有效基线初相位需满足以下条件:其中为垂直基线中心纬度幅角。
[0092][0093][0094][0095][0096][0097][0098]
第四步,构形维持控制阈值选取。对于平面内维持控制而言,假 设构形设计时垂直有效基线发散量为δb
′
ect
,期望的构形维持控制周 期为ti,针对构形平面外幅度发散的垂直有效基线变化量为δb
′
ectz
, 可得构形平面内维持控制阈值δe
max
为:
[0099][0100]
其中k≥1为预留安全系数(一般取k=1.5)。同时,求构形沿 航迹向垂直有效基线发散量δb
′
at
满足:
[0101][0102]
对于平面外维持控制而言,如果依照平面内构形维持控制阈值 选取时预估的基线变化量δb
′
ectz
,则平面外构形维持控制阈值δi
max
为:
[0103][0104]
因此,结合构形平面外尺度发散速率,当给定平面外维持控制阀 值时,也间接给定了构形平面外构形维持控制周期to。
[0105]
本发明公开了一种分布式卫星编队构形设计与保持一体化迭代 优化方法,通过建立控制能力-基线摄动模型,得到了定量分析编队 控制能力对观测基线摄动影响的方法,解决了编队设计和编队控制间 的耦合影响的问题;通过采用本发明方法,获得了观测基线始终可用 的编队构形,保证了编队系统应用效能,大幅提高了观测效率,且计 算复杂度低,构形设计时间短。
[0106]
以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范 围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技 术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围 之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1