1.本发明涉及风洞运行与流场控制领域,更进一步的,本发明涉及一种基于神经网络的通用风洞流场控制方法。
背景技术:2.通过风洞试验获取各型航空、航天飞行器设计研制所必需的气动数据,是目前获取这一关键数据最主要、获取数据真实置信度最高的方式。为确保所获取全飞行包线内气动试验数据的精准度,要求风洞流场控制系统在亚跨声速速域马赫数稳定控制、阶梯变马赫数跟踪控制,和超声速速域总压稳定控制、连续变马赫数跟踪控制等多个工况条件下均能实现对风洞流场的高精度控制。为满足这一要求,往往需要针对不同工况条件设计开发不同的风洞流场控制系统,这显著增加了风洞流场控制系统设计的难度与工作量,也使得风洞流场控制系统软件维护复杂度大大增加。
3.另一方面,传统风洞流场控制系统多基于误差反馈的pid控制设计得到,能较好满足原有小口径风洞的流场控制需求。但随着近年来新建风洞口径越来越大,风洞结构形式也不仅仅局限于原有暂冲式或闭口式,大型暂冲式风洞对于气源的快速消耗、开口式风洞大试验舱的空腔特性,均对具有大迟滞特性的风洞流场稳定控制带来了显著干扰影响,难以仅通过pid控制对其进行快速补偿抑制,甚至可能由于pid控制参数增益设置过大诱发风洞流场振荡导致发散。
技术实现要素:4.本发明的一个目的是解决至少上述问题和/或缺陷,并提供至少后面将说明的优点。
5.为了实现本发明的这些目的和其它优点,提供了一种基于神经网络的通用风洞流场控制方法,包括:步骤一,基于神经网络构造阀门特性函数;步骤二,基于步骤一得到的阀门特性函数和预测的气源压力变化值,以确定调压阀开度控制目标的前馈补偿增量;步骤三,基于增量式pid控制器确定调压阀开度控制目标的反馈控制增量,采用如下公式得到:;其中,表示在第步控制周期,被控量对期望控制目标的跟踪偏差,可由公式计算得到,式中表示被控量在第步控制周期的实时采集
反馈值;、、分别表示增量式pid控制器的比例、积分、微分系数;在进行亚跨声速速域马赫数控制时,期望控制目标为马赫数目标,实时采集反馈值为实时试验马赫数;在进行超声速速域总压控制时,期望控制目标为稳定段总压目标,实时采集反馈值为实时稳定段总压;步骤四,基于步骤二、步骤三中分别得到的调压阀开度控制目标的前馈补偿增量和反馈控制增量,确定调压阀开度复合控制目标增量,以应用于风洞流场控制中;在步骤四中,所述调压阀开度复合控制目标增量被配置为采用如下公式得到:。
6.优选的是,在步骤四中,将调压阀开度复合控制目标增量应用于风洞流场控制的方法被配置为包括:步骤五,基于步骤四得到的调压阀开度复合控制目标增量,以确定第步控制周期调压阀开度复合控制目标;步骤六,基于步骤五得到的调压阀开度复合控制目标和实时采集得到的调压阀开度,采用增量式开度控制pid控制器确定调压阀开度控制指令反馈控制增量;步骤七,根据步骤六得到的调压阀开度控制指令反馈控制增量,确定第步控制周期调压阀开度控制指令,实现对风洞流场的控制。
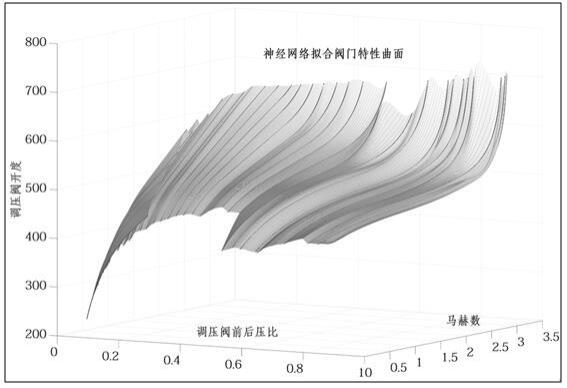
7.优选的是,在步骤一中,所述阀门特性函数的构造方法被配置为包括:s10,根据风洞马赫数试验能力包线,开展风洞调试试验,获取包含试验能力包线边界的给定调试马赫数ma,流场稳定条件下的风洞稳定段总压与气源压力之比和相应调压阀开度试验结果;s11,构建由输入层、多层隐层和输出层构成的阀门特性函数神经网络,以获取的马赫数和风洞稳定段总压与气源压力之比试验结果为网络输入,以相应调压阀开度试验结果为网络输出,依据误差反向传播算法,采用批量模式对神经网络进行训练,直至神经网络预测输出与实际调压阀开度试验结果偏差小于期望给定值,认为训练完成,得到基于神经网络的阀门特性函数。
8.优选的是,在步骤二中,所述预测的气源压力变化值是指基于第步控制周期实时采集的气源压力值和气源压力变化趋势,预测第步控制周期气源压力值。
9.优选的是,在步骤二中,所述调压阀开度控制目标的前馈补偿增量被配置为采用如下公式获取:;其中,为期望稳定段总压目标,为试验马赫数目标,为基于神经网络的阀门特性函数。
10.优选的是,在步骤五中,所述调压阀开度复合控制目标被配置为采用如下公式获取:;其中,为第步控制周期的调压阀开度复合控制目标。
11.优选的是,在步骤六中,所述调压阀开度控制指令反馈控制增量被配置为采用如下公式获取:;其中,、、为增量式开度控制pid控制器的比例、积分、微分系数,表示在第步控制周期,调压阀开度的实际开度对调压阀开度复合控制目标的跟踪偏差,可由公式计算得到。
12.优选的是,在步骤七中,第步控制周期的调压阀开度控制指令被配置为采用如下公式获取:;其中,为第步控制周期的调压阀开度控制指令。
13.本发明至少包括以下有益效果:其一,本发明通过基于神经网络构造阀门特性函数设计,可实现调压阀开度控制目标的前馈补偿增量的精确计算,能有效补偿抑制气源快速压降、稳定段总压目标变化等对于风洞控制造成干扰作用;其二,本发明相对于现有技术而言,通过基于开环前馈补偿和闭环反馈控制的复合流场控制架构设计,可实现亚跨声速速域和超声速速域对马赫数和/或总压的高精度强鲁棒稳定、跟踪控制,大大简化风洞流场控制系统设计难度和复杂度。
14.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本
发明的研究和实践而为本领域的技术人员所理解。
附图说明
15.图1为本发明应用阀门特性函数神经网络绘制的阀门特性曲面图;图2为本发明基于神经网络的通用风洞流场控制方法结构框图;图3为本发明第20210140车次稳定段总压试验曲线图;图4为本发明第20210140车次主气路调压阀开度控制指令曲线图。
具体实施方式
16.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
17.本发明公开了一种基于神经网络的通用风洞流场控制方法,可广泛适用于亚跨声速速域和超声速速域的马赫数和总压稳定、跟踪控制,大大简化风洞流场控制系统设计难度和复杂度;且基于前馈补偿和反馈控制的复合流场控制架构能有效抑制各种外界干扰作用,实现对控制目标的高精度稳定或跟踪控制。
18.在实际应用中风洞流场控制的过程通常包括:1、风洞试验准备,根据风洞试验要求,确定风洞运行试验条件和相应开车参数,包括超声速速域试验时的稳定段总压目标,亚跨声速速域试验时的马赫数目标,总压控制精度、马赫数控制精度,试验模型姿态,调压阀预置开度,增量式pid控制器的比例、积分、微分系数、、,增量式开度控制pid控制器的比例、积分、微分系数、、;2、风洞充压启动:将调压阀打开至预置开度,待风洞稳定段总压达到稳定段总压目标的97%,完成风洞充压启动;3、风洞闭环流场控制:在风洞启动完成后,将风洞流场控制系统的开环运行模式转为总压前馈-反馈复合控制模式,按照总压复合控制算法计算下一控制周期调压阀开度;4、风洞试验数据采集:风洞试验流场稳定,达到试验要求条件,风洞测控系统采集试验数据,风洞流场控制系统重复步骤3,不断控制稳定段总压,使其保持稳定;5、试验模型姿态调整:判定试验模型是否完成所有预期姿态调整,如没有完成,转入步骤3,风洞闭环控制,采集试验数据;如完成所有预期姿态调整,转入步骤6;6、风洞关车:停止闭环流场控制,关闭调压阀,风洞关车。
19.而在本发明中主要是对流程3的进行优化改进,以提供一种基于神经网络的通用风洞流场控制方法,包括:步骤s100:基于神经网络构造阀门特性函数;根据某大型射流风洞马赫数试验能力包线,开展风洞调试试验,获取包含试验能力包线边界(马赫数0.3-3.5)内的给定调试马赫数,流场稳定条件下的风洞稳定段总
压与气源压力之比和相应调压阀开度试验结果;构建由输入层、若干隐层和输出层构成的阀门特性函数神经网络,以获取的风洞稳定段总压与气源压力之比和马赫数试验结果为网络输入,以相应调压阀开度试验结果为网络输出,依据误差反向传播算法,采用批量模式对神经网络进行训练,直至神经网络预测输出与实际调压阀开度试验结果偏差小于期望给定值,认为训练完成,得到基于神经网络的阀门特性函数,图1给出了阀门特性函数神经网络绘制的阀门特性曲面图;步骤s200: 预测气源压力变化值;在控制周期,依据实时采集的气源压力值和气源压力变化趋势,预测下一控制周期气源压力值;步骤s300:确定调压阀控制目标的前馈补偿增量;由期望稳定段总压目标和试验马赫数目标,以及当前和下一控制周期气源压力、,依据前述得到的基于神经网络的阀门特性函数,确定调压阀开度控制目标的前馈补偿增量:
ꢀꢀꢀꢀꢀꢀꢀ
(1)步骤s400:确定调压阀控制目标的反馈控制增量;进行超声速速域总压稳定控制,依据期望控制目标(即稳定段总压目标)和实时采集反馈值(即实时采集的稳定段总压),由增量式pid控制器确定调压阀开度控制目标的反馈控制增量: (2)其中为控制目标跟踪偏差,、、为增量式pid控制的比例、积分、微分系数;步骤s500:根据调压阀控制目标的前馈补偿增量和调压阀控制目标的反馈控制增量,确定调压阀开度复合控制目标增量:步骤s600:确定下一控制周期调压阀开度复合控制目标;根据调压阀开度复合控制目标增量,确定下一控制周期调压阀开度复
合控制目标合控制目标
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)步骤s700:确定调压阀开度控制指令反馈控制增量;根据调压阀开度复合控制目标和实施采集得到的调压阀开度,由增量式pid控制器确定调压阀开度控制指令反馈控制增量:
ꢀꢀꢀꢀꢀꢀꢀ
(4)其中,为调压阀开度跟踪偏差,、、为增量式pid控制的比例、积分、微分系数;步骤s800:确定下一控制周期调压阀开度控制指令;根据调压阀开度控制指令反馈控制增量,确定下一控制周期调压阀开度控制指令控制指令
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)图2给出了基于神经网络的通用风洞流场控制方法结构框图。在基于神经网络的通用风洞流场控制方法作用下,图3给出了实际应用中风洞稳定段总压试验曲线,可看出在风洞开车后20s左右已将稳定段总压稳定控制在目标总压153kpa附近,并在试验全程保持稳定在目标总压0.15%带内,保证了试验流场的稳定性。图4给出了相应的调压阀开度控制目标曲线,可看出调压阀开度控制目标由前馈补偿控制指令和pid反馈控制指令两部分组成,且前馈补偿控制指令幅值较pid反馈控制指令明显偏大。
20.以上方案只是一种较佳实例的说明,但并不局限于此。在实施本发明时,可以根据使用者需求进行适当的替换和/或修改。
21.这里说明的设备数量和处理规模是用来简化本发明的说明的。对本发明的应用、修改和变化对本领域的技术人员来说是显而易见的。
22.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。