基于多传感器与数据通信的智能STIC小车的制作方法
基于多传感器与数据通信的智能stic小车
技术领域
1.本实用新型涉及智能移动机器人领域,具体为基于多传感器与数据通信的智能stic小车。
背景技术:
2.营造一个安全可靠的家居环境一直是人们关心的热点问题,智能移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,适用于家庭的监护机器人融合了移动机器人定位技术、语音识别技术、通信技术与人体识别技术等多技术于一体,当家庭有老人、孕妇和病人等行动不便者,这时如果有一个能起到监护作用的机器人来协助监护是非常重要的,能够设计出一种可以语音识别、人体识别等多功能于一体的协助监护家庭行动不方便的人员的移动机器人是非常具有研究价值的。
3.市场上常见的的智能机器人要么价格昂贵,要么在传感器的丰富度、计算能力以及通信能力方面做出了妥协,同时结构复杂导致后期的维修维护成本高、难度大,为此,我们提出基于多传感器与数据通信的智能stic小车。
技术实现要素:
4.本实用新型的目的在于提供基于多传感器与数据通信的智能stic小车,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:基于多传感器与数据通信的智能stic小车,包括顶板与底板,所述顶板上端表面靠近一侧位置固定安装有底座,所述底座上方设置有l型支撑板,所述l型支撑板一侧连接有u型夹,所述u型夹内部卡设有智能手机。
6.作为本实用新型的进一步方案,所述底板上端表面靠近四角位置垂直安装有竖板,所述顶板上端表面贯穿开设有插槽,所述竖板远离底板一端设置在插槽内部,所述竖板两侧面且位于顶板上方位置连接有挡块。
7.作为本实用新型的进一步方案,所述顶板前方设置有衔接板一,所述顶板后方设置有衔接板二,所述顶板两侧均设置有侧板,所述衔接板一和衔接板二与侧板之间均设置弧型板,所述衔接板一外侧面安装有接头。
8.作为本实用新型的进一步方案,两组所述竖板之间安装有横板,横板与侧板之间设置有卡板,所述卡板上端表面与顶板底面相固接,所述竖板一侧与侧板之间设置有车轮。
9.作为本实用新型的进一步方案,所述底板上端表面靠近四角位置均安装有电机驱动模块,所述电机驱动模块输出轴穿过竖板与车轮相连,所述底板上端表面靠近电机驱动模块一侧位置安装有电池组。
10.作为本实用新型的进一步方案,所述底板上端表面靠近中间位置安装有主控板,所述底板上端表面靠近主控板一侧位置安装有超声波模块,所述衔接板二一侧靠近下边缘位置安装有舵机,所述衔接板二外侧面靠近上边缘位置设置有远距离体温检测传感器,所述主控板上安装有usb电缆,所述usb电缆远离主控板一端设置有插头。
11.与现有技术相比,本实用新型的有益效果是:该基于多传感器与数据通信的智能stic小车中,小车在行走过程中,通过超声波模块发送、接收超声波,然后利用向前方发送超声波并计算超声波返回到小车的时间来判断小车前方是否有障碍物,障碍物离小车有多远,我们将采集到的距离信息上传输至智能手机,当小车与障碍距离太过接近,有可能发生碰撞时,智能手机将会控制小车及时躲避障碍物,具有避免损害车体或造成不必要的损失防碰撞的能力。
12.该基于多传感器与数据通信的智能stic小车中,将智能手机卡设在u型夹内部,底座与l型支撑板可以对智能手机进行支撑,从而将智能手机固定在顶板上,同时智能手机能够以舵机为中心在水平面上进行旋转,该结构设计可以最大限度提升观察视角,有效减少观察死角的存在。
附图说明
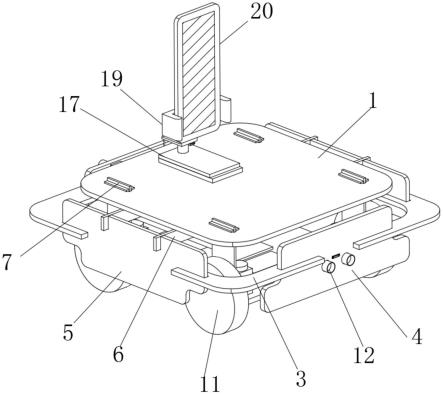
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型的背面结构示意图;
15.图3为本实用新型的局部示意图;
16.图4为本实用新型中底板与主控板结构示意图。
17.图中:1、顶板;2、底板;3、弧型板;4、衔接板一;5、侧板;6、卡板;7、竖板;8、衔接板二;9、舵机;10、远距离体温检测传感器;11、车轮;12、接头;13、主控板;14、超声波模块;15、电池组;16、电机驱动模块;17、底座;18、l型支撑板;19、u型夹;20、智能手机;21、usb电缆;22、插头。
具体实施方式
18.请参阅图1-4,本实用新型提供一种技术方案:基于多传感器与数据通信的智能stic小车,包括顶板1与底板2,顶板1上端表面靠近一侧位置固定安装有底座17,底座17上方设置有l型支撑板18,l型支撑板18一侧连接有u型夹19,u型夹19内部卡设有智能手机20。
19.底板2上端表面靠近四角位置垂直安装有竖板7,顶板1上端表面贯穿开设有插槽,竖板7远离底板2一端设置在插槽内部,竖板7两侧面且位于顶板1上方位置连接有挡块,顶板1前方设置有衔接板一4,顶板1后方设置有衔接板二8,顶板1两侧均设置有侧板5,衔接板一4和衔接板二8与侧板5之间均设置弧型板3,衔接板一4外侧面安装有接头12。
20.两组竖板7之间安装有横板,横板与侧板5之间设置有卡板6,卡板6上端表面与顶板1底面相固接,竖板7一侧与侧板5之间设置有车轮11,底板2上端表面靠近四角位置均安装有电机驱动模块16,电机驱动模块16输出轴穿过竖板7与车轮11相连,底板2上端表面靠近电机驱动模块16一侧位置安装有电池组15,通过电池组15为电机驱动模块16提供电源,从而带动车轮11转动,从而使得该小车行走。
21.底板2上端表面靠近中间位置安装有主控板13,底板2上端表面靠近主控板13一侧位置安装有超声波模块14,衔接板二8一侧靠近下边缘位置安装有舵机9,衔接板二8外侧面靠近上边缘位置设置有远距离体温检测传感器10,主控板13上安装有usb电缆21,usb电缆21远离主控板13一端设置有插头22,智能手机20能够以舵机9为中心在水平面上进行旋转,该结构设计可以最大限度提升观察视角,有效减少观察死角的存在,且可以通过usb电缆21
上安装的插头22可以将主控板13与智能手机20相连。
22.本实用新型的具体实施方式为:将智能手机20卡设在u型夹19内部,此时底座17与l型支撑板18可以对智能手机20进行支撑,从而将智能手机20固定在顶板1上,同时智能手机20能够以舵机9为中心在水平面上进行旋转,该结构设计可以最大限度提升观察视角,有效减少观察死角的存在,然后将usb电缆21上安装的插头22与智能手机20相连,使得智能手机20与底板2上端表面安装的主控板13相连,通过电池组15为电机驱动模块16提供电源,从而带动车轮11转动,从而使得该小车行走,在行走过程中,通过超声波模块14发送、接收超声波,然后利用向前方发送超声波并计算超声波返回到小车的时间来判断小车前方是否有障碍物,障碍物离小车有多远,我们将采集到的距离信息上传输至智能手机20,当小车与障碍距离太过接近,有可能发生碰撞时,智能手机20将会控制小车及时躲避障碍物,避免损害车体或造成不必要的损失防碰撞的能力,同时远距离体温检测传感器10可以测量人体体温、环境湿度,发现异常后立即报告,其中,机器人的车身由衔接板一4、衔接板二8、弧型板3与侧板5构成,顶板1通过卡板6配合竖板7采用榫卯方式固定。
23.本方案中舵机9的型号为mg996r。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1