一种具有多保护功能的智能水泵控制系统
1.本实用新型属于水泵控制技术领域,特别是涉及一种具有多保护功能的智能水泵控制系统。
背景技术:
2.水泵是日常生活中用于运输液体的一种机器,可输送水、油以及液态金属等,在城市供水系统、污水排污系统、建筑系统以及农业水利系统等方面有着广泛应用。传统的水泵控制系统面临着许多弊端,1)主要依赖于人工手动操作,浪费大量人力资源;2)在传统的手动控制中,只要用户手动打开水泵,水泵不受其他因素影响,一直保持开启状态,存在众多安全隐患,易造成水泵缺水空转,轻者导致水泵永久性损伤,重者则会造成水泵过热起火,且利用水泵传输的液体大多为良导体,当液体侵入水泵供电系统或水泵控制系统硬件电路后会造成漏电及电源短路,导致人员触电并引发火灾;3)传统的水泵控制系统不易及时发现故障,且无法及时显示和记录故障发生原因,故障发生后无法针对故障原因进行分析并加以改进系统。
技术实现要素:
3.针对现有技术的不足,本实用新型拟解决的技术问题是,提出了一种具有多保护功能的智能水泵控制系统。
4.本实用新型解决所述技术问题采用以下技术方案:
5.一种具有多保护功能的智能水泵控制系统,其特征在于,该系统包括主控芯片、通讯模块、复位电路模块、模拟测量模块、传感器模块、电源电路模块、人机交互模块、水泵启停控制模块和存储电路模块;通讯模块与主控芯片的串口引脚连接,复位电路模块与主控芯片的异步复位引脚连接,模拟测量模块与主控芯片的a/d引脚连接,电源电路模块与主控芯片的电源输入引脚连接,人机交互模块、水泵启停控制模块和传感器模块均与主控芯片的i/o引脚连接,存储电路模块与主控芯片的iic引脚连接;
6.所述电源电路模块包括外接电源、一号电容c1~九号电容c9、二号二极管d2、一号电感l1、二号电感l2、一号整流桥br1、稳压器u3和稳压模块u1;外接电源输出端与二号电容c2和二号二极管d2并联后连接一号整流桥br1的输入端,一号电容c1和三号电容c3并联后再与一号整流桥br1的输出端连接,一号电容c1和三号电容c3并联后的一端与二号电感l2的一端连接,一号电容c1和三号电容c3并联后的另一端接地;二号电感l2的另一端和五号电容c5的一端均连接稳压器u3的一号引脚,五号电容c5的另一端接地,稳压器u3的二号引脚接地,六号电容c6、八号电容c8、九号电容c9的一端连接在一起后分别与稳压器u3的三号引脚和一号电感l1的一端相连,六号电容c6、八号电容c8、九号电容c9的另一端均接地;一号电感l1的另一端和七号电容c7的一端均与稳压模块u1的输入引脚连接,七号电容c7的另一端接地,稳压模块u1的输出引脚与四号电容c4的一端相连接,四号电容c4的另一端接地;电源电路模块将外接电源转换为12v、5v和3.3v直流电源;
7.所述模拟测量模块包括二号整流桥br2、运算放大器u5、十三号电容c
13
、十四号电容c
14
和七号电阻r7~十一号电阻r
11
;八号电阻r8、十四号电容c
14
和九号电阻r9依次串联,二号整流桥br2的三号引脚与八号电阻r8的一端,八号电阻r8的另一端和十四号电容c
14
的一端均接地,八号电阻r8和十四号电容c
14
构成rc滤波电路,九号电阻r9的另一端与运算放大器u5的反相输入端连接,运算放大器u5的同相输入端接地,七号电阻r7和十三号电容c
13
并联后再与运算放大器u5的输出端和反相输入端连接,运算放大器u5的输出端依次连接十号电阻r
10
和十一号电阻r
11
,十一号电阻r
11
的一端同时与主控芯片的a/d引脚连接,另一端接地;
8.所述人机交互模块包括蜂鸣器be、二十二号电阻r
22
~二十四号电阻r
24
、二十号电容c
20
~二十二号电容c
22
、三号三极管q3、lcd驱动器和一号按键s1~六号按键s6;蜂鸣器be1的正极分别与二十三号电阻r
23
和二十二号电阻r
22
的一端连接,二十三号电阻r
23
的另一端与电源电路模块的5v直流电源输出端相连,二十二号电阻r
22
的另一端与主控芯片的i/o引脚连接;蜂鸣器be1的负极与三号三极管q3的集电极相连,三号三极管q3的发射极接地,三号三极管q3的基极与二十号电容c
20
的一端相连,二十号电容c
20
的另一端与二十二号电阻r
22
的一端连接;一号按键s1、二号按键s2和三号按键s3的一端相连后与主控芯片的i/o引脚相连,四号按键s4、五号按键s5和六号按键s6的一端相连后与主控芯片的i/o引脚相连,一号按键s1和四号按键s4的另一端相连后与主控芯片的i/o引脚相连,二号按键s2和五号按键s5的另一端相连后与主控芯片的i/o引脚相连,三号按键s3和六号按键s6的另一端相连后与主控芯片的i/o引脚相连;lcd驱动器的cs引脚与主控芯片的i/o引脚相连,lcd驱动器的wr引脚与主控芯片的i/o引脚相连,lcd驱动器的data引脚与主控芯片的i/o引脚相连,lcd驱动器的vlcd和vdd引脚通过二十四号电阻r
24
相连后与电源电路模块的5v直流电源输出端相连,二十一号电容c
21
和二十二号电容c
22
的一端连接lcd驱动器vdd引脚和电源电路模块的5v直流电源输出端相连的导线,另一端均接地。
9.进一步的,所述水泵启停控制模块包括一号电阻r1~四号电阻r4、十号电容c
10
、十一号电容c
11
、一号二极管d1、一号三极管q1和继电器u2;一号电阻r1的一端与电源电路模块的12v直流电源输出端相连,另一端与继电器u2的一号引脚相连,十一号电容c
11
的一端连接到一号电阻r1与继电器u2的一号引脚相连的导线上,十一号电容c
11
的另一端接地;继电器u2的四号引脚与一号三极管q1的集电极相连,一号三极管q1的发射极接地,一号三极管q1的基极与二号电阻r2的一端相连,二号电阻r2的另一端连接主控芯片的pb9引脚,三号电阻r3的一端连接到二号电阻r2与主控芯片的pb9引脚相连的导线上,三号电阻r3的另一端接地;一号二极管d1的正极与继电器u2的四号引脚连接,负极与继电器u2的一号引脚连接,继电器u2的二号引脚与外部电源输入端连接;四号电阻r4的一端与十号电容c
10
串联后连接继电器u2的三号引脚,四号电阻r4的另一端连接水泵正极;
10.所述存储电路模块包括五号电阻r5、六号电阻r6、十二号电容c
12
和存储芯片u4;存储芯片u4的scl引脚与主控芯片u6的iic引脚连接,五号电阻r5的一端与电源电路模块的3.3v直流电源输出端连接,另一端连接到存储芯片u4的scl引脚与主控芯片的iic引脚连接的导线上;存储芯片u4的sda引脚与主控芯片的iic引脚连接,六号电阻r6的一端与电源电路模块的3.3v直流电源输出端连接,另一端连接到存储芯片u4的sda引脚与主控芯片u6的iic引脚连接的导线上;存储芯片u4的vcc引脚与电源电路模块的3.3v直流电源输出端相连接,十二号电容c
12
的一端接地,另一端接到存储芯片u4的vcc引脚与3.3v直流电源输出端相连
的导线上。
11.进一步的,所述通讯模块包括十二号电阻
12
~十五号电阻r
15
、十八号电阻r
18
~二十一号电阻r
21
、十七号电容c
17
、二号三极管q2、发光二极管led、第一光电耦合器u7、第二光电耦合器u9、sp485芯片u8、一号稳压二极管tvs1和二号稳压二极管tvs2;sp485芯片u8的ro引脚通过十四号电阻r
14
与二号三极管q2的基极连接,发光二极管led的一端连接电源电路模块的5v直流电源,另一端通过导线与二号三极管q2的发射极连接,二号三极管q2的集电极通过十三号电阻r
13
与第一光电耦合器u7的发光端输入引脚连接,第一光电耦合器u7发光端输出引脚外接隔离地,主控芯片的串口接收引脚与第一光电耦合器u7的受光端输入引脚连接,第一光电耦合器u7的受光端输出引脚接地;十二号电阻r
12
的一端连接主控芯片的串口接收引脚,另一端连接电源电路模块的3.3v直流电源输出端;十九号电阻r
19
的一端连接电源电路模块的3.3v直流电源输出端,另一端连接第二光电耦合器u9的发光端输入引脚,第二光电耦合器u9的发光端输出引脚连接主控芯片的串口发送引脚,第二光电耦合器u9的受光端输入引脚与十七号电容c
17
的一端相连,十七号电容c
17
的另一端接隔离地,第二光电耦合器u9的受光端输出引脚与十八号电阻r
18
的一端连接,十八号电阻r
18
的另一端与sp485芯片u8的re引脚相连,sp485芯片u8的di引脚与二十号电阻r
20
的一端相连,二十号电阻r
20
的另一端接在十八号电阻r
18
与sp485芯片u8的re引脚之间的导线上,sp485芯片u8的di引脚与二十号电阻r
20
相连的导线同时与隔离地相连;sp485芯片u8的gnd引脚也与隔离地连接,sp485芯片u8的vc引脚与5v直流电源连接,sp485芯片u8的de引脚与re引脚连接,sp485芯片u8的b引脚与十五号电阻r
15
的一端连接,十五号电阻r
15
的另一端连接隔离地,一号稳压二极管tvs1与十五号电阻r
15
并联;二十一号电阻r
21
的一端和二号稳压二极管tvs2的一端均与sp485芯片u8的a引脚连接,二十一号电阻r
21
的另一端连接485通讯总线,二号稳压二极管tvs2的另一端接隔离地。
12.进一步的,所述传感器模块包括水位传感器和水压传感器,水位传感器为电极式水位传感器或水位浮球传感器,水压传感器为磁助式电接点压力表。
13.进一步的,所述复位电路模块包括十六号电阻r
16
和十八号电容c
18
;十六号电阻r
16
的一端与主控芯片的异步复位引脚连接,另一端引出导线与电源电路模块的3.3v直流电源输出端连接;十八号电容c
18
的一端与十六号电阻r
16
和主控芯片的异步复位引脚连接的一端连接,另一端接地。
14.与现有技术相比,本实用新型的有益效果是:
15.本实用新型根据对水泵的控制需求,设计出了包含主控芯片以及多个模型在内的具有多保护功能的智能水泵控制系统,传感器模块实时采集水压、水位数据,并通过人机交互模块实时显示水泵当前的工作状态;模拟测量模块实时采集水泵的工作电压、工作电流以及漏电电流,主控芯片根据三个参量是否超过设定的故障整定值判断水泵是否存在故障,若超过整定值则通过水泵启停控制模块控制水泵立即关闭,从而达到控制水泵启停的目的,同时通过人机交互模块的蜂鸣器进行声光报警,水泵工作参数和故障等信息通过显示屏进行显示,并将工作参数和故障信息记录在存储电路模块中,方便技术人员查看水泵运行信息和故障信息并进行调试。该智能水泵控制系统结构设计合理,性能稳定,抗干扰性好,通过应用该智能水泵控制系统可以使水泵实现真正无人化智能控制,降低了人工成本,避免水泵因故障损坏和故障造成的财产损失和人员伤亡,具有较好的实时性、可靠性和可
维护性。
附图说明
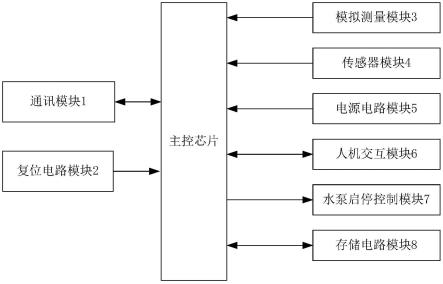
16.图1为实用新型的整体结构框图;
17.图2为实用新型的主控芯片的引脚连接图;
18.图3为实用新型的电源电路模块的电路图;
19.图4为实用新型的模拟测量模块的电路图;
20.图5为实用新型的通讯模块的电路图;
21.图6为实用新型的存储电路模块的电路图;
22.图7为实用新型的人机交互模块的电路图;
23.图8为实用新型的水泵启停控制模块的电路图;
24.图中,1、通讯模块;2、复位电路模块;3、模拟测量模块;4、传感器模块;5、电源电路模块;6、人机交互模块;7、水泵启停控制模块;8、存储电路模块;
25.c1~c
22
、一号电容~二十二号电容;r1~r
21
、一号电阻~二十一号电阻;l1、一号电感;l2、二号电感;d
1-一号二极管;d
2-二号二极管;q1、一号三极管;q2、二号三极管;q3、三号三极管;br1、一号整流桥;br2、二号整流桥;u1、稳压模块;u2、继电器;u3、稳压器;u4、存储芯片;u5、运算放大器;u6、主控芯片;u7、第一光电耦合器;u8、sp485芯片;u9、第二光电耦合器;be、蜂鸣器;led、发光二极管;s1~s6、一号按键~六号按键;tvs1、一号稳压二极管;tvs2、二号稳压二极管。
具体实施方式
26.下面结合附图和具体实施方式对本实用新型的技术方案进行详细描述,但并不用于限定本技术的保护范围。
27.本实用新型提供一种具有多保护功能的智能水泵控制系统(简称系统,参见图1-8),包括主控芯片u6、通讯模块1、复位电路模块2、模拟测量模块3、传感器模块4、电源电路模块5、人机交互模块6、水泵启停控制模块7和存储电路模块8;通讯模块1与主控芯片u6的串口引脚连接,用于实现该控制系统与工控机的通讯;复位电路模块2与主控芯片u6的异步复位引脚连接,用于主控芯片u6不正常工作时的复位重启;模拟测量模块3与主控芯片u6的a/d引脚连接,用于将水泵的工作电压、工作电流和漏电电流等模拟信号转换为数字信号并传输至主控芯片u6;传感器模块4用于测量水位和水压,与主控芯片u6的i/o引脚连接;电源电路模块5与主控芯片u6的电源输入引脚连接,为控制系统供电;人机交互模块6和水泵启停控制模块7均与主控芯片的i/o引脚连接,人机交互模块6用于参数设置和信息显示,水泵启停控制模块7用于控制水泵的启停;存储电路模块8与主控芯片u6的iic引脚连接,用于存储水泵工作参数和故障信息。
28.如图2所示,所述复位电路模块2包括十六号电阻r
16
和十八号电容c
18
;十六号电阻r
16
的一端与主控芯片u6的异步复位引脚连接,另一端引出导线与电源电路模块5的3.3v直流电源输出端连接;十八号电容c
18
的一端与十六号电阻r
16
和主控芯片u6的异步复位引脚连接的一端连接,另一端通过导线接地;主控芯片u6的boot0引脚与十七号电阻r
17
的一端连接,十七号电阻r
17
的另一端接地,将主控芯片u6的boot0引脚的电平拉低;晶振的两端与主
控芯片u6的pfo/osc-in引脚和pf1/osc-out引脚连接,十五号电容c
15
的一端与晶振的一端连接,另一端接地;十六号电容c
16
的一端与晶振的另一端连接,另一端接地;十五号电容c
15
和十六号电容c
16
为匹配电容,为了使晶振两端的等效电容等于或接近负载电容,满足晶振的起振要求,使晶振正常工作;本实施例中,主控芯片u6的型号为stm32f030c8t6。
29.如图3所示,所述电源电路模块5包括外接电源、一号电容c1~九号电容c9、二号二极管d2、一号电感l1、二号电感l2、一号整流桥br1、稳压器u3和稳压模块u1;外接电源输出端与二号电容c2和二号二极管d2并联后连接一号整流桥br1的输入端,一号电容c1和三号电容c3并联后再与一号整流桥br1的输出端连接,一号电容c1和三号电容c3并联后的一端与二号电感l2的一端连接,一号电容c1和三号电容c3并联后的另一端通过导线接地;二号电感l2的另一端和五号电容c5的一端均连接稳压器u3的一号引脚(输入端),五号电容c5的另一端通过导线接地,稳压器u3的二号引脚通过导线接地,六号电容c6、八号电容c8、九号电容c9的一端通过导线连接在一起后分别与稳压器u3的三号引脚(输出端)和一号电感l1的一端相连,六号电容c6、八号电容c8、九号电容c9的另一端均通过导线接地;一号电感l1的另一端和七号电容c7的一端均与稳压模块u1的输入引脚连接,七号电容c7的另一端接地,稳压模块u1的输出引脚与四号电容c4的一端相连接,四号电容c4的另一端接地。电源电路模块5是整个系统正常工作的基础,其稳定性和负载能力直接影响系统工作性能,由于该系统中模块较多,额定工作电压各不相同,因此电源电路模块5采用多级稳压的方式进行设计,即:外接电源通过一号整流桥br1进行整流,再通过由一号电容c1、三号电容c3和二号电感l2构成的一级滤波电路进行滤波,得到12v直流电源,其中一部分12v直流电源为水泵启停控制模块7和通讯模块1供电,另一部分12v直流电源经过稳压器u3和由六号电容c6、八号电容c8、九号电容c9和一号电感l1构成的二级滤波电路进行滤波,得到5v直流电源,其中一部分5v直流电源为传感器模块4供电,另一部分5v直流电源经过稳压模块u1稳压后得到3.3v直流电源,为主控芯片u6、人机交互模块6以及存储电路模块8供电,主控芯片u6的电源输入引脚通过电源线与电源电路模块5的3.3v直流电源输出端连接;本实施例中,一号整流桥br1的型号为db107,稳压器u3的型号为l7805cv,稳压模块u1的型号为ams1117-3.3。
30.如图4所示,所述模拟测量模块3包括二号整流桥br2、运算放大器u5、十三号电容c
13
、十四号电容c
14
和七号电阻r7~十一号电阻r
11
;八号电阻r8、十四号电容c
14
和九号电阻r9依次串联,二号整流桥br2的三号引脚与八号电阻r8的一端,八号电阻r8的另一端和十四号电容c
14
的一端均接地,八号电阻r8和十四号电容c
14
构成rc滤波电路,九号电阻r9的另一端与运算放大器u5的反相输入端连接,运算放大器u5的同相输入端接地,七号电阻r7和十三号电容c
13
并联后再与运算放大器u5的输出端和反相输入端连接,运算放大器u5的输出端依次连接十号电阻r
10
和十一号电阻r
11
,十一号电阻r
11
的一端同时与主控芯片u6的a/d引脚连接,另一端接地。模拟信号经过二号整流桥br2整流,再经过rc滤波电路进行滤波,滤波后的模拟信号经过运算放大器u5放大波形,放大后的波形通过十号电阻r
10
实现波形幅度控制;模拟测量模块3能够将水泵的电压、电流、漏电等模拟信号转换为数字信号,水泵的工作电压、工作电流、漏电电流三种参量通过采样获得;本实施例中,运算放大器u5的型号为mcp6004。
31.如图5所示,所述通讯模块1包括十二号电阻
12
~十五号电阻r
15
、十八号电阻r
18
~二十一号电阻r
21
、十七号电容c
17
、二号三极管q2、发光二极管led、第一光电耦合器u7、第二
光电耦合器u9、sp485芯片u8、一号稳压二极管tvs1和二号稳压二极管tvs2;sp485芯片u8的ro引脚通过十四号电阻r
14
与二号三极管q2的基极连接,发光二极管led的一端接+5v直流电源,另一端通过导线与二号三极管q2的发射极连接,二号三极管q2的集电极通过十三号电阻r
13
与第一光电耦合器u7的发光端输入引脚连接,第一光电耦合器u7发光端输出引脚外接隔离地,主控芯片u6的串口接收引脚与第一光电耦合器u7的受光端输入引脚连接,第一光电耦合器u7的受光端输出引脚接地;十二号电阻r
12
的一端连接主控芯片u6的串口接收引脚,另一端连接电源电路模块5的3.3v直流电源输出端;十九号电阻r
19
的一端连接电源电路模块5的3.3v直流电源输出端,另一端连接第二光电耦合器u9的发光端输入引脚,第二光电耦合器u9的发光端输出引脚连接主控芯片u6的串口发送引脚,第二光电耦合器u9的受光端输入引脚与十七号电容c
17
的一端相连,十七号电容c
17
的另一端通过导线接隔离地,第二光电耦合器u9的受光端输出引脚与十八号电阻r
18
的一端连接,十八号电阻r
18
的另一端通过导线与sp485芯片u8的re引脚相连,sp485芯片u8的di引脚与二十号电阻r
20
的一端相连,二十号电阻r
20
的另一端接在十八号电阻r
18
与sp485芯片u8的re引脚之间的导线上,sp485芯片u8的di引脚与二十号电阻r
20
相连的导线同时与隔离地相连;sp485芯片u8的gnd引脚也与隔离地连接,sp485芯片u8的vc引脚与5v直流电源连接,sp485芯片u8的de引脚通过导线与re引脚连接,sp485芯片u8的b引脚与十五号电阻r
15
的一端连接,十五号电阻r
15
的另一端连接隔离地,一号稳压二极管tvs1与十五号电阻r
15
并联;二十一号电阻r
21
的一端和二号稳压二极管tvs2的一端均与sp485芯片u8的a引脚连接,二十一号电阻r
21
的另一端连接485通讯总线,二号稳压二极管tvs2的另一端接隔离地。通讯模块利用第一光电耦合器u7和第二光电耦合器u9实现485通讯总线隔离,使得通讯模块具有极强的抑制共模干扰能力和稳定性,最大传输速度可以达到10mb/s以上,且接口简单,使得上、下位机之间的硬件连接方便快捷;发光二极管led可对当前通讯的收发状态进行指示,一号稳压二极管tvs1和二号稳压二极管tvs2用于防止高压,具有保护电路的作用,十五号电阻r
15
和二十一号电阻r
21
用于阻抗匹配。
32.如图6所示,所述存储电路模块8用于存储水泵工作参数和故障信息,包括五号电阻r5、六号电阻r6、十二号电容c
12
和存储芯片u4;存储芯片u4的scl引脚经过导线与主控芯片u6的iic引脚连接,五号电阻r5的一端与电源电路模块5的3.3v直流电源输出端连接,另一端连接到存储芯片u4的scl引脚与主控芯片u6的iic引脚连接的导线上;存储芯片u4的sda引脚通过导线与主控芯片u6的iic引脚连接,六号电阻r6的一端与电源电路模块5的3.3v直流电源输出端连接,另一端连接到存储芯片u4的sda引脚与主控芯片u6的iic引脚连接的导线上;存储芯片u4的vcc引脚通过导线与电源电路模块5的3.3v直流电源输出端相连接,十二号电容c
12
的一端接地,另一端接到存储芯片u4的vcc引脚与3.3v直流电源输出端相连的导线上;存储芯片u4的e0、e1、e2、wc、gnd引脚均接地;存储芯片u4的型号为at24c256,at24c256存储芯片是串行电可擦可编程存储器,内部有256页,每一页为128字节,任一单元的地址为15位,地址范围0000h-7fffh,具有结构紧凑、存储容量大等特点。
33.如图7所示,所述人机交互模块6包括蜂鸣器be、二十二号电阻r
22
~二十四号电阻r
24
、二十号电容c
20
~二十二号电容c
22
、三号三极管q3、lcd驱动器和一号按键s1~六号按键s6;蜂鸣器be1的正极分别与二十三号电阻r
23
和二十二号电阻r
22
的一端连接,二十三号电阻r
23
的另一端与电源电路模块5的5v直流电源输出端相连,二十二号电阻r
22
的另一端与主控芯片u6的i/o引脚连接;蜂鸣器be1的负极与三号三极管q3的集电极相连,三号三极管q3的发
射极接地,三号三极管q3的基极与二十号电容c
20
的一端相连,二十号电容c
20
的另一端与二十二号电阻r
22
的一端连接;一号按键s1、二号按键s2和三号按键s3的一端通过导线相连后与主控芯片u6的i/o引脚相连,四号按键s4、五号按键s5和六号按键s6的一端通过导线相连后与主控芯片u6的i/o引脚相连,一号按键s1和四号按键s4的另一端通过导线相连后与主控芯片u6的i/o引脚相连,二号按键s2和五号按键s5的另一端通过导线相连后与主控芯片u6的i/o引脚相连,三号按键s3和六号按键s6的另一端通过导线相连后与主控芯片u6的i/o引脚相连;lcd驱动器的cs引脚通过导线与主控芯片u6的i/o引脚相连,lcd驱动器的wr引脚通过导线与主控芯片u6的i/o引脚相连,lcd驱动器的data引脚通过导线与主控芯片u6的i/o引脚相连,lcd驱动器的vlcd和vdd引脚通过二十四号电阻r
24
相连后通过导线与电源电路模块5的5v直流电源输出端相连,二十一号电容c
21
和二十二号电容c
22
的一端连接lcd驱动器vdd引脚和电源电路模块5的5v直流电源输出端相连的导线,另一端均接地。由于本系统所需按键较多,为提高主控芯片端口的利用率,按键输入电路设计为2x3的矩阵按键,矩阵按键的行与列的交点通过一个按键相连接,提高端口的利用率,解决主控芯片引脚占用过多的问题;人机交互模块6的显示屏选择段码屏,使用型号为ht1621的lcd驱动器驱动显示屏显示,主控芯片采用串行通讯的方式向lcd驱动器传输数据,显示屏用于显示水泵当前的工作参数,蜂鸣器用于发生故障时的报警,通过按键对故障保护参数进行整定,一号按键s1为“一键整定”按键,水泵正常工作时按下此按键可对水泵的故障保护参数进行自动整定,二号按键s2为“设置”按键,三号按键s3为“手动自动切换”按键,四号按键s4为“参数加”按键,五号按键s5为“参数减”按键,六号按键s6为“启动/停止”按键。
34.如图8所示,所述水泵启停控制模块7包括一号电阻r1~四号电阻r4、十号电容c
10
、十一号电容c
11
、一号二极管d1、一号三极管q1和继电器u2;一号电阻r1的一端与电源电路模块5的12v直流电源输出端相连,另一端与继电器u2的一号引脚通过导线相连,十一号电容c
11
的一端连接到一号电阻r1与继电器u2的一号引脚相连的导线上,十一号电容c
11
的另一端接地;继电器u2的四号引脚与一号三极管q1的集电极相连,一号三极管q1的发射极接地,一号三极管q1的基极与二号电阻r2的一端相连,二号电阻r2的另一端通过导线连接主控芯片的pb9引脚,三号电阻r3的一端连接到二号电阻r2与主控芯片的pb9引脚相连的导线上,三号电阻r3的另一端接地;一号二极管d1的正极与继电器u2的四号引脚连接,负极与继电器u2的一号引脚连接,继电器u2的二号引脚与外部电源输入端连接;四号电阻r4的一端与十号电容c
10
串联后连接继电器u2的三号引脚,四号电阻r4的另一端连接到水泵正极。
35.所述传感器模块4包括水位传感器和水压传感器,水位传感器为电极式水位传感器或水位浮球传感器,水压传感器为磁助式电接点压力表;电极式水位传感器具有三个探头,利用水或者液体的导电性能,在水箱高水位或低水位时使相互绝缘的电极导通或不导通,并发出信号传递到主控芯片,当控制上水池时,电极式水位传感器的接线方式为下水池“高、中”端口短接,将上水池内水位探头“高、中、低”的位置固定,水池内中低探头距离5cm,控制下水池时下水池“高、中”端口之间不短接;电极式水位传感器测量精度高,但是探头容易发生腐蚀,适用于无腐蚀性液体的水位测量;水位浮球传感器将浮球的常开引线接到下水池的“高、中”端口,水位浮球传感器能够克服液体腐蚀的问题,被广泛应用于石油化工、水处理、染料工业等方面,但是测量精度比电极式水位传感器低;电极式水位传感器和水位浮球传感器均位于水位测量;磁助式电接点压力表安装在水泵出水管道3-5米的位置,用于
测量压力。
36.本实用新型的工作原理和工作流程是:
37.该控制系统通过485通讯总线将通讯模块1与工控机连接,用户通过人机交互模块6选择控制模式并设定水泵工作参数,水位传感器和水压传感器将采集到的水位和水压信息转换为开关量传输到主控芯片,提供水位水压数据以实时显示水泵当前工作状态,模拟测量模块3实时采集水泵的工作电压、工作电流以及漏电电流,并将这三种参量的模拟信号转换为数字信号,主控芯片u6将这三种参量分别与各自的故障整定值进行比较,若超过设定的故障整定值上限或下限,则主控芯片通过水泵启停控制模块7控制水泵立即关闭,从而达到控制水泵启停的目的,同时通过人机交互模块6的蜂鸣器进行声光报警,水泵工作参数和故障等信息通过显示屏进行显示,并将工作参数和故障信息记录在存储电路模块8中;当主控芯片不正常工作时,通过复位电路模块2对其进行复位重启,防止意外故障发生;实施例中使用的工控机型号为联想拯救者r7000计算机,受控水泵为25lg3-10x3型水泵。
38.本实用新型未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1