搬送模拟装置和搬送系统的制作方法
[0001]
本发明涉及一种搬送模拟装置和搬送系统。
背景技术:
[0002]
已知如下一种技术:使用摄像机及编码器等传感器来检测由输送机搬送的物品的位置,机器人基于所述传感器的检测结果来进行物品的取出作业。例如,参照专利文献1。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2016-16915号公报
技术实现要素:
[0006]
发明要解决的问题
[0007]
另外,在上述那样的利用机器人进行物品的取出作业等的系统中,在模拟由传感器检测出的物品的流动的情况下,例如使用离线软件(offline soft)。
[0008]
然而,在工厂等实际的现场和通过离线软件再现出的环境中,状况不同的情况有很多。例如,在离线软件的环境下配置的输送机的宽度、方向等有时与在实际的现场中配置的输送机的宽度、方向等不同。另外,即使在离线软件的环境中机器人的动作没有问题的情况下,也有很多在实际的现场才会注意到的情况,如在实际的现场存在障碍物等。
[0009]
像这样,使用离线软件存在难以在与实际的现场同样的环境中准确地模拟物品的流动的情况。
[0010]
因此,期望在与实际的现场同样的环境中准确地模拟物品的流动。
[0011]
用于解决问题的方案
[0012]
(1)本公开的搬送模拟装置的一个方式具备:虚拟地进行动作的虚拟搬送部;第一虚拟物品供给部,其以规定的条件向所述虚拟搬送部供给虚拟物品;以及虚拟物品管理部,其与所述虚拟搬送部的虚拟的移动相匹配地逐次更新所述虚拟物品的位置。
[0013]
(2)本公开的搬送系统的一个方式具备:搬送部,其用于搬送物品;移动量检测部,其用于检测所述搬送部的移动量;第二虚拟物品供给部,其以规定的条件供给虚拟物品;以及虚拟物品管理部,其与所述搬送部的移动量相匹配地逐次更新所述虚拟物品的位置。
[0014]
发明的效果
[0015]
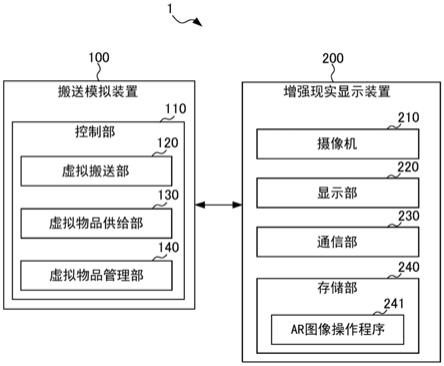
根据一个方式,能够在与实际的现场同样的环境中准确地模拟物品的流动。
附图说明
[0016]
图1是示出第一实施方式所涉及的搬送模拟系统的整体结构的框图。
[0017]
图2是示出在虚拟搬送部中设定的虚拟通道的一例的图。
[0018]
图3是例示虚拟物品供给部基于供给排程来向各虚拟通道供给、在各虚拟通道的虚拟物品生成位置虚拟地生成的虚拟物品的情况的图。
[0019]
图4是示出由增强现实显示装置进行的显示的一例的图。
[0020]
图5是对搬送模拟装置的模拟处理进行说明的流程图。
[0021]
图6是示出第二实施方式所涉及的搬送系统的整体结构的框图。
[0022]
图7是示出在搬送部中设定的虚拟通道的一例的图。
[0023]
图8是示出由增强现实显示装置进行的显示的一例的图。
[0024]
图9是对搬送系统的模拟处理进行说明的流程图。
[0025]
附图标记说明
[0026]
1:搬送模拟系统;2:搬送系统;100:搬送模拟装置;120:虚拟搬送部;130、130a:虚拟物品供给部;140、140a:虚拟物品管理部;200:增强现实显示装置;300:机器人;400:控制装置;500:搬送部。
具体实施方式
[0027]
<第一实施方式>
[0028]
首先,对本实施方式的概要进行说明。在本实施方式中,搬送模拟装置基于实际的现场的设计阶段的图来将虚拟搬送部配置于虚拟空间,虚拟物品供给部以规定的条件向虚拟搬送部供给虚拟物品,虚拟物品管理部与虚拟搬送部的移动相匹配地逐次更新虚拟物品的位置,由此模拟物品的流动。
[0029]
由此,根据本实施方式,能够解决“以在实际的现场同样的环境中准确地模拟物品的流动”这个问题。
[0030]
以上是本实施方式的概要。
[0031]
接着,使用附图来详细地说明本实施方式的结构。
[0032]
图1是示出第一实施方式所涉及的搬送模拟系统1的整体结构的框图。搬送模拟系统1包括搬送模拟装置100和增强现实显示装置200。
[0033]
搬送模拟装置100与增强现实显示装置200可以经由lan(local area network:局域网)、因特网等未图示的网络来以有线或无线的方式彼此连接。在该情况下,搬送模拟装置100和增强现实显示装置200具备用于通过所述的连接来相互进行通信的未图示的通信部。此外,搬送模拟装置100与增强现实显示装置200还可以经由未图示的连接接口来以有线或无线的方式彼此直接连接。
[0034]
此外,搬送模拟装置100也可以包括增强现实显示装置200。
[0035]
<增强现实显示装置200>
[0036]
增强现实显示装置200是智能手机、平板电脑终端、头戴式显示器、带增强现实(ar:augmented reality)显示功能的眼镜等。增强现实显示装置200具有cpu等控制部(未图示)以及键盘或触摸面板等输入部(未图示),并且具有摄像机210、显示部220、通信部230以及存储部240。
[0037]
摄像机210至少对实际的现场进行拍摄。
[0038]
显示部220是液晶显示器等,将由摄像机210拍摄到的现实空间图像与由后述的搬送模拟装置100生成的表示模拟结果的ar图像数据叠加地显示。
[0039]
通信部230经由有线或无线来与搬送模拟装置100连接,对与搬送模拟装置100之间的通信进行控制。
frame:跟踪坐标系)”),将搬送虚拟物品的方向设为x轴,将虚拟搬送部120的宽度方向设为y轴。
[0054]
如图2所示,将虚拟通道121的宽度设定得比虚拟通道122的宽度宽。另外,如后所述,以配置于用虚线表示的各虚拟通道121、122的中心线的上游侧且用于虚拟地生成虚拟物品的虚拟物品生成位置(未图示)为基准,在规定的范围内设定在y轴方向上随机地校正虚拟物品的生成位置的随机偏移。
[0055]
此外,虽然将虚拟通道121的宽度设定得比虚拟通道122的宽度宽,但是不限定于此,也可以将虚拟通道121的宽度与虚拟通道122的宽度设定为相同,还可以将虚拟通道121的宽度设定得比虚拟通道122的宽度窄。即,可以根据在实际的现场计划生产的物品的种类来适当地决定虚拟通道121、122的宽度。
[0056]
另外,在虚拟搬送部120中设定了2个虚拟通道121、122,但是也可以设定1个或3个以上的多个虚拟通道。另外,将由虚拟通道121、122搬送的物品设为互不相同的种类,但也可以设为相同种类的物品。
[0057]
<虚拟物品供给部130>
[0058]
虚拟物品供给部130以规定的条件向虚拟搬送部120供给虚拟物品。
[0059]
具体地说,在虚拟物品供给部130中预先设定供给排程来作为规定的条件。
[0060]
在供给排程中设定的参数例如包含供给率、以及供给时间(应用时间)或总供给距离。供给率表示虚拟物品供给部130每单位时间向虚拟通道121、122供给的虚拟物品的个数。供给时间(应用时间)表示应用所述供给排程的时间。换言之,供给时间表示虚拟物品供给部130基于所述供给排程向虚拟通道121、122供给虚拟物品的时间。另外,总供给距离表示虚拟搬送部120在应用一个供给排程的期间所移动的移动量。例如,在供给排程为“供给时间10秒或总供给距离1m、以及供给率30个/分钟”的情况下,由虚拟物品供给部130供给的虚拟物品的间隔决定为200mm。
[0061]
此外,可以针对各虚拟通道121、122执行至少一个供给排程、或几个供给排程的组合。另外,每个虚拟通道121、122的供给排程可以不同,也可以相同。
[0062]
图3是例示虚拟物品供给部130基于供给排程向各虚拟通道121、122供给在各虚拟通道121、122的虚拟物品生成位置虚拟地生成的虚拟物品71、72的情况的图。此外,在图3中,示出针对所生成的各虚拟物品71、72在y轴方向上施加随机的校正的、以虚拟物品生成位置为基准的规定的范围,来作为随机校正区域131、132。
[0063]
如图3中例示的那样,虚拟物品供给部130在虚拟通道121中重复执行“供给时间10秒或总供给距离1m、以及供给率30个/分钟”的供给排程a与“供给时间10秒或总供给距离1m、以及供给率60个/分钟”的供给排程b的组合。如图3所示,虚拟物品供给部130在执行供给排程a的情况下,以200mm的间隔供给虚拟物品71,在执行供给排程b的情况下,以100mm的间隔供给虚拟物品71。
[0064]
另一方面,虚拟物品供给部130在虚拟通道122中重复执行“供给时间10秒或总供给距离1m、以及供给率60个/分钟”的供给排程b与“供给时间10秒或总供给距离1m、以及供给率70个/分钟”的供给排程c的组合。由此,虚拟物品供给部130在执行供给排程b的情况下,以100mm的间隔供给虚拟物品72,在执行供给排程c的情况下,以86mm的间隔供给虚拟物品72。
[0065]
此外,在图3中,示出虚拟物品71、72的一部分。
[0066]
另外,虚拟物品供给部130在各虚拟通道121、122的随机校正区域131、132内被施加了随机的校正后的位置处生成虚拟物品。由此,如图3所示,各虚拟物品71、72以相对于用虚线表示的各虚拟通道121、122的中心在y轴方向上随机地偏移的方式被供给。通过像这样、对生成虚拟物品71、72的位置施加随机的校正,能够确认今后要设置于实际的现场的机器人等与周边装置是否会发生干扰、连接于所述机器人等的线缆是否会发生缠绕等。
[0067]
另外,也可以对虚拟物品供给部130供给的虚拟物品71、72附加表示物品的种类的信息。
[0068]
另外,对于虚拟物品71、72,用矩形进行了表示,但是不限定于此,可以用任意的形状来显示,也可以用实际生产的物品的形状来显示。
[0069]
另外,随机校正区域131、132配置于搬送坐标系的相同的x坐标的位置,但是也可以配置于不同的x坐标的位置。
[0070]
另外,随机的校正不仅包含位置,还包含姿势。
[0071]
<虚拟物品管理部140>
[0072]
虚拟物品管理部140与虚拟搬送部120的虚拟的移动量相匹配地逐次更新虚拟物品71、72的位置。
[0073]
具体地说,虚拟物品管理部140基于虚拟搬送部120的位置或姿势、虚拟搬送速度、虚拟通道121、122等的设定以及虚拟物品供给部130的供给排程等的设定,来逐次更新虚拟物品71、72在搬送坐标系中的位置。
[0074]
例如,虚拟物品管理部140以由虚拟物品供给部130将各虚拟物品71、72供给至虚拟通道121、122的时刻为基准,来基于虚拟搬送部120的虚拟搬送速度逐次计算各虚拟物品71、72的移动量。虚拟物品管理部140根据计算出的各虚拟物品71、72的移动量,来在各虚拟通道121、122上逐次更新各虚拟物品71、72在搬送坐标系中的位置。由此,如图3所示,能够模拟在虚拟搬送部120上朝向与今后要配置于实际的现场中的输送机(搬送部)相同的方向搬送虚拟物品71、72的情形。
[0075]
此外,在如图3所示、例如在实际的现场已经设置有机器人300以及作为用于控制机器人300的机器人控制装置的控制装置400的情况下,控制装置400也可以从搬送模拟装置100接收虚拟物品71、72的位置的数据。在该情况下,在虚拟物品71、72的各个虚拟物品移动到用虚线的矩形表示的机器人300的作业区域80的情况下,控制装置400基于接收到的数据使机器人300进行取出虚拟物品71、72的动作,并使机器人300进行将虚拟物品71、72放置于尚未设置的排出用输送机等的动作。通过这样,能够确认机器人300是否按设计那样进行动作、有无与机器人300的动作有关的障碍物等。另外,在通过上述的供给排程a与供给排程b的组合制作了虚拟物品71的间隔的疏密的情况下,能够确认在机器人300的取出作业等中是否需要设置作为缓冲器的临时放置台等。
[0076]
在该情况下,预先将机器人300的坐标系、虚拟搬送部120的搬送坐标系以及增强现实显示装置200的摄像机210的摄像机坐标系对应起来。例如,可以使设置于机器人300的前端部的设定工具与被放置于用于设置输送机(虚拟搬送部120)的预定的位置的校准治具的多个规定位置接触,由此设定被用作机器人300和虚拟搬送部120的坐标系的基准坐标系。另外,也可以基于由摄像机210对粘贴于所述校准治具、机器人300的标记进行拍摄得到
的图像,来将摄像机210的摄像机坐标系与所述基准坐标系进行关联。
[0077]
<ar图像的生成处理>
[0078]
控制部110例如执行存储于未图示的存储部的ar图像生成程序,基于预先设定的机器人300的动作程序、虚拟搬送部120中的设定、虚拟物品供给部130中的设定以及由虚拟物品管理部140逐次更新的各虚拟物品71、72在搬送坐标系中的位置,来逐次生成虚拟搬送部120和各虚拟物品的ar图像数据。
[0079]
控制部110将所生成的ar图像数据发送到增强现实显示装置200。增强现实显示装置200基于摄像机坐标系或基准坐标系来调整所接收到的ar图像数据的位置和姿势,并显示由摄像机210拍摄到的现实空间图像和所接收到的ar图像。
[0080]
图4是示出由增强现实显示装置200进行的显示的一例的图。
[0081]
如图4所示,在增强现实显示装置200的显示部220中,显示由增强现实显示装置200的摄像机210拍摄到的机器人300和控制装置400的现实空间图像以及由控制部110生成的ar图像。
[0082]
在所显示的ar图像中,虚拟搬送部120被显示为平面状的虚拟的输送机,以虚拟搬送速度(例如100mm/sec)向箭头所示的搬送方向md搬送各虚拟物品71、72。
[0083]
此外,控制部110也可以如图4所示那样生成虚拟搬送部120和各虚拟物品71、72的ar图像,并且生成随机校正区域131、132、作业区域80的ar图像。通过这样,增强现实显示装置200的用户能够直观地识别随机校正区域131、132与作业区域80的关系、作业区域80与作业员的行动范围的关系、作业区域80与其它机器人的作业区域的关系、随机校正区域131、132及作业区域80相对于作业内容的大小等。
[0084]
另外,控制部110也可以如图4所示那样生成表示当前正在执行的供给排程a、b以及各虚拟通道121、122中的虚拟物品71、72间的距离的信息的ar图像。并且,在对虚拟物品供给部130供给的虚拟物品71、72附加表示物品的种类的信息的情况下,控制部110也可以生成所附加的表示虚拟物品71、72的物品的种类的信息的ar图像。
[0085]
通过这样,增强现实显示装置200的用户能够目视确认基于当前的供给排程a、b的动作状况、被供给的虚拟物品71、72的种类,从而能够确认当前的供给排程a、b是否适当。
[0086]
另外,控制部110也可以生成机器人300的动作限制区域的ar图像。动作限制区域是使机器人300的动作停止或限制机器人30的动作的区域,是设定为作业员、周边设备等的周围的区域。通过这样,增强现实显示装置200的用户能够直观地识别动作限制区域的设定范围。
[0087]
另外,控制部110也可以如图4所示那样生成对机器人300设定的基准坐标系oc以及虚拟搬送部120的搬送方向md的ar图像。通过这样,增强现实显示装置200的用户能够目视确认基准坐标系oc与搬送方向md的关系,从而能够确认虚拟搬送部120的搬送方向md相对于基准坐标系oc等的设定是否适当。
[0088]
另外,在ar图像中,对于虚拟物品71、72,用立方体进行了显示,但是可以用任意的形状来显示,也可以用实际生产的物品的形状来显示。
[0089]
另外,增强现实显示装置200也可以从搬送模拟装置100获取模拟结果的数据并生成ar图像。
[0090]
另外,ar图像可以是三维图像,也可以是二维图像。
[0091]
另外,基准坐标系oc的关联可以自动地进行,也可以由增强现实显示装置200的用户直接操作ar图像来手动地匹配坐标系。
[0092]
<搬送模拟装置100的模拟处理>
[0093]
接着,对与第一实施方式所涉及的搬送模拟装置100的模拟处理相关的动作进行说明。
[0094]
图5是对搬送模拟装置100的模拟处理进行说明的流程图。此处所示的流程在进行模拟处理的期间被重复执行。
[0095]
在步骤s11中,虚拟物品供给部130基于供给排程来向虚拟搬送部120的各虚拟通道121、122供给虚拟物品71、72。
[0096]
在步骤s12中,虚拟物品管理部140与虚拟搬送部120的虚拟的移动相匹配地逐次更新虚拟物品71、72的位置。
[0097]
在步骤s13中,控制部110基于预先设定的机器人300的动作程序、虚拟搬送部120中的设定、虚拟物品供给部130中的设定以及在步骤s12中逐次更新后的各虚拟物品71、72的位置,来逐次生成虚拟搬送部120和各虚拟物品71、72的ar图像。
[0098]
根据以上内容,第一实施方式的搬送模拟装置100在基于实际的现场的设计阶段的图配置在虚拟空间内的虚拟搬送部120上生成虚拟物品71、72,并以预先设定的虚拟搬送速度搬送虚拟物品71、72,由此模拟物品的流动。由此,搬送模拟装置100能够在与实际的现场同样的环境中准确地模拟物品的流动。
[0099]
另外,搬送模拟装置100基于模拟结果来生成ar图像,使增强现实显示装置200显示实际的现场的现实空间图像和ar图像。由此,增强现实显示装置200的用户能够在实际的现场中没有周边设备的状态下,基于设计阶段的图来确认在实际的现场是否存在与机器人300的动作发生干扰的障碍物等,能够确认机器人300的性能(performance)是否如期待那样。
[0100]
以上,对第一实施方式进行了说明。
[0101]
<第二实施方式>
[0102]
在第二实施方式中,与第一实施方式的不同点在于,在搬送系统2中,在实际的现场设置有搬送部,虚拟物品供给部130a以规定的条件向搬送部供给虚拟物品,虚拟物品管理部140a与搬送部的移动量相匹配地逐次更新虚拟物品的位置,由此模拟物品的流动。
[0103]
由此,搬送系统2能够在与实际的现场同样的环境中准确地模拟物品的流动。
[0104]
下面,对第二实施方式进行说明。
[0105]
图6是示出第二实施方式所涉及的搬送系统的整体结构的框图。此外,对具有与图1所示的要素同样的功能的要素标注相同的标记,并省略详细的说明。
[0106]
如图6所示,搬送系统2具有增强现实显示装置200、机器人300、控制装置400以及搬送部500。
[0107]
<搬送部500>
[0108]
搬送部500是已设置于实际的现场的、用于搬送物品的输送机,包括电动机510和脉冲编码器520。
[0109]
电动机510基于来自控制装置400的控制指令进行驱动,由此使搬送部500进行动作。
[0110]
脉冲编码器520作为移动量探测部来逐次检测电动机510的输出轴的旋转位置和旋转量作为搬送部500的移动量。脉冲编码器520将检测值发送到控制装置400。此外,也可以采用编码器等来代替脉冲编码器520。
[0111]
此外,在第二实施方式所涉及的搬送模拟中,设定搬送部500的长度、宽度、被配置的位置及方向来作为搬送部500的参数。另外,使搬送部500基于来自控制装置400的控制指令实际进行动作,由此根据由脉冲编码器520检测出的检测值来计算搬送部500的移动量。即,通过使搬送部500实际进行动作,来模拟物品的流动。
[0112]
使搬送部500进行动作的理由是,即使设为控制装置400以固定的速度对搬送部500的电动机510进行了控制,也会产生搬送速度的加减速、所谓的“脉动”,很难以固定间隔供给物品。因此,后述的虚拟物品供给部130a每隔基于搬送部500的移动量的规定的间隔来供给虚拟物品,由此实现固定间隔的供给。
[0113]
另外,在搬送部500的用于搬送物品的面上设定至少一个虚拟通道。
[0114]
图7是示出在搬送部500中设定的虚拟通道的一例的图。如图7所示,在由搬送部500搬送例如2个不同种类的物品的情况下,在搬送部500中设定2个虚拟通道501、502。
[0115]
此外,在图7中,搬送部500以从下侧向上侧为搬送方向来搬送虚拟物品。因此,与图2的情况同样,对搬送部500设定将搬送方向设为x轴、并将搬送部500的宽度方向设为y轴的搬送坐标系(未图示)。
[0116]
如图7所示,与图2的情况同样,将虚拟通道501的宽度设定得比虚拟通道502的宽度宽。另外,以被配置于用虚线表示的各虚拟通道501、502的中心线上的上游侧且用于虚拟地生成虚拟物品的虚拟物品生成位置(未图示)为基准,设定用于对虚拟物品的生成位置在y轴方向上随机地进行校正的随机校正区域511、512。
[0117]
此外,虽然将虚拟通道501的宽度设定得比虚拟通道502的宽度宽,但是不限定于此,也可以将虚拟通道501的宽度与虚拟通道502的宽度设定为相同,还可以将虚拟通道501的宽度设定得比虚拟通道502的宽度窄。即,可以根据在实际的现场计划生产的物品的种类来适当地决定虚拟通道501、502的宽度。
[0118]
另外,在搬送部500中设定了2个虚拟通道501、502,但是也可以设定1个或3个以上的多个虚拟通道。另外,将由虚拟通道501、502搬送的物品设为互不相同的种类,但也可以设为相同种类的物品。
[0119]
<控制装置400>
[0120]
控制装置400对于本领域技术人员而言是公知的机器人控制装置,控制装置400基于控制信息生成动作指令,并将所生成的动作指令发送到机器人300。由此,控制装置400对机器人300的动作进行控制。另外,控制装置400还对搬送部500的动作进行控制。此外,在用机床等来代替机器人300的情况下,控制装置400也可以是数值控制装置等。
[0121]
如图6所示,控制装置400具有控制部410。并且,控制部410具有虚拟物品供给部130a和虚拟物品管理部140a的功能。
[0122]
此外,控制部410具有cpu、rom、ram、cmos存储器等,它们构成为能够经由总线相互进行通信,这对于本领域技术人员来说是公知的。
[0123]
cpu是在整体上对控制装置400进行控制的处理器。cpu经由总线读出保存于rom的系统程序和应用程序,并按照所述系统程序和应用程序来对控制装置400整体进行控制。由
此,如图6所示,控制部410构成为实现虚拟物品供给部130a和虚拟物品管理部140a的功能。
[0124]
<虚拟物品供给部130a>
[0125]
虚拟物品供给部130a以规定的条件向搬送部500供给虚拟物品。
[0126]
具体地说,在虚拟物品供给部130a中预先设定供给排程来作为规定的条件。
[0127]
在供给排程中设定的参数例如包含供给时间(应用时间)或总供给距离、以及规定的间隔。例如,在供给排程为“供给时间10秒或总供给距离1m、以及规定的间隔200mm”的情况下,虚拟物品供给部130a每隔基于搬送部500的移动量的200mm的间隔供给虚拟物品。
[0128]
此外,可以针对各虚拟通道501、502执行至少一个供给排程、或几个供给排程的组合。另外,每个虚拟通道501、502的排程供给可以不同,也可以相同。
[0129]
例如,如图7所示,虚拟物品供给部130a在虚拟通道501中重复执行“供给时间10秒或总供给距离1m、以及规定的间隔200mm”的供给排程a1与“供给时间10秒或总供给距离1m、以及规定的间隔100mm”的供给排程b1的组合。在该情况下,虚拟物品供给部130a根据从搬送部500的脉冲编码器520接收到的检测值来逐次计算搬送部500的移动量,并在执行供给排程a1的情况下,每当搬送部500的移动量增加200mm时供给虚拟物品71。另外,虚拟物品供给部130a在执行供给排程b1的情况下,每当搬送部500的移动量增加100mm时供给虚拟物品71。
[0130]
另一方面,如图7所示,虚拟物品供给部130a在虚拟通道502中重复执行“供给时间10秒或总供给距离1m、以及规定的间隔100mm”的供给排程b1与“供给时间10秒或总供给距离1m、以及规定的间隔86mm”的供给排程c1的组合。由此,虚拟物品供给部130a在执行供给排程b1的情况下,每当搬送部500的移动量增加100mm时供给虚拟物品72,虚拟物品供给部130a在执行供给排程c1的情况下,每当搬送部500的移动量增加86mm时供给虚拟物品72。
[0131]
此外,在图7中,与图3的情况同样,示出虚拟物品71、72的一部分。
[0132]
另外,虚拟物品供给部130a在随机校正区域511、512内被施加了随机的校正后的各虚拟通道501、502的位置处生成虚拟物品。由此,如图7所示,各虚拟物品71、72以相对于用虚线表示的各虚拟通道501、502的中心在y轴方向上随机地偏移的方式被供给。通过像这样、对生成虚拟物品71、72的位置施加随机的校正,能够确认已设置于实际的现场的机器人300与周边装置是否会发生干扰、连接于机器人300的线缆是否会发生缠绕等。
[0133]
另外,也可以对虚拟物品供给部130a供给的虚拟物品71、72附加表示物品的种类的信息。
[0134]
<虚拟物品管理部140a>
[0135]
虚拟物品管理部140a与搬送部500的移动量相匹配地逐次更新虚拟物品71、72的位置。
[0136]
具体地说,虚拟物品管理部140a基于搬送部500的位置或姿势、移动量、虚拟通道501、502等的设定以及虚拟物品供给部130的供给排程等的设定,来逐次更新虚拟物品71、72在搬送坐标系中的位置。
[0137]
例如,虚拟物品管理部140a以由虚拟物品供给部130a将各虚拟物品71、72供给至各虚拟通道501、502的时刻为基准,根据从搬送部500的脉冲编码器520接收到的检测值,来逐次计算搬送部500的移动量。虚拟物品管理部140a与计算出的搬送部500的移动量相匹配地逐次更新各虚拟通道501、502上的虚拟物品在搬送坐标系中的位置。由此,能够如图7所
示那样模拟在搬送部500上朝向与搬送部500相同的方向搬送虚拟物品71、72的情形。
[0138]
<ar图像的生成处理>
[0139]
控制部410例如与图1的控制部110同样,执行存储于未图示的存储部的ar图像生成程序,基于预先设定的机器人300的动作程序、搬送部500中的设定、虚拟物品供给部130a中的设定以及由虚拟物品管理部140a逐次更新的各虚拟物品71、72的位置,来逐次生成各虚拟物品71、72的ar图像数据。
[0140]
控制部410将所生成的ar图像数据发送到增强现实显示装置200。增强现实显示装置200基于摄像机坐标系或基准坐标系来调整所接收到的ar图像数据的位置和姿势,并显示由摄像机210拍摄到的现实空间图像和所接收到的ar图像。
[0141]
此外,预先将机器人300的坐标系、搬送部500的搬送坐标系以及增强现实显示装置200的摄像机210的摄像机坐标系对应起来。例如,可以使设置于机器人300的前端部的设定工具与被放置于搬送部500的校准治具的多个规定位置接触,由此设定被用作机器人300和搬送部500的坐标系的基准坐标系oc。另外,也可以基于由摄像机210对粘贴于所述校准治具、机器人300的标记进行拍摄得到的图像,来将摄像机210的摄像机坐标系与所述基准坐标系oc进行关联。
[0142]
图8是示出由增强现实显示装置200进行的显示的一例的图。
[0143]
如图8所示,在增强现实显示装置200的显示部220中,显示由增强现实显示装置200的摄像机210拍摄到的机器人300、控制装置400及搬送部500的现实空间图像以及由控制部410生成的ar图像。
[0144]
在ar图像中,在搬送部500上向箭头所示的搬送方向md搬送各虚拟物品71、72。
[0145]
而且,也可以为,在虚拟物品71、72的各个虚拟物品移动到用虚线的矩形表示的机器人300的作业区域80的情况下,控制装置400例如基于虚拟物品71、72的位置的数据,使机器人300进行取出虚拟物品71、72的动作,并使机器人300进行将虚拟物品71、72放置于未图示的物品排出用输送机等的动作。通过这样,能够确认机器人300是否按设计那样进行动作、有无与机器人300的动作有关的障碍物等。另外,在通过上述的供给排程a1与供给排程b1的组合制作了虚拟物品71的间隔的疏密的情况下,能够确认在机器人300的取出作业等中是否需要设置作为缓冲器的临时放置台等。
[0146]
<搬送系统2的模拟处理>
[0147]
接着,对与第二实施方式所涉及的搬送系统2的模拟处理有关的动作进行说明。
[0148]
图9是对搬送系统2的模拟处理进行说明的流程图。此处所示的流程在进行模拟处理的期间被重复执行。
[0149]
在步骤s21中,虚拟物品供给部130a基于供给排程,每隔规定的间隔向搬送部500的各虚拟通道501、502供给虚拟物品71、72。
[0150]
在步骤s22中,虚拟物品管理部140a与搬送部500的移动量相匹配地逐次更新虚拟物品71、72的位置。
[0151]
在步骤s23中,控制部410基于预先设定的机器人300的动作程序、搬送部500中的设定、虚拟物品供给部130a中的设定以及在步骤s22中逐次更新后的各虚拟物品71、72的位置,来逐次生成虚拟物品71、72的ar图像。
[0152]
根据以上内容,第二实施方式的搬送系统2在设置于实际的现场的搬送部500上生
成虚拟物品71、72,并与搬送部500的移动量相匹配地搬送虚拟物品71、72,由此模拟物品的流动。由此,搬送系统2能够在与实际的现场同样的环境中准确地模拟物品的流动。
[0153]
另外,搬送系统2基于模拟结果来生成ar图像,使增强现实显示装置200显示实际的现场的现实空间图像和ar图像。由此,增强现实显示装置200的用户能够在设置了搬送部500的状态下确认机器人300与周边设备的干扰、在实际的现场是否存在与机器人300的动作发生干扰的障碍物等,能够确认机器人300的性能是否如期待的那样。
[0154]
以上,对第二实施方式进行了说明。
[0155]
以上,对第一实施方式和第二实施方式进行了说明,但是并不限定于上述的实施方式,包含能够达成目的的范围内的变形、改进等。
[0156]
<变形例1>
[0157]
在上述的第一实施方式中,将搬送模拟装置100设为一个计算机,但是不限定于此。例如,搬送模拟装置100也可以包括在控制装置400中。
[0158]
另外,也可以设为,例如服务器具备搬送模拟装置100的虚拟搬送部120、虚拟物品供给部130以及虚拟物品管理部140中的一部分或全部。另外,也可以在云上利用虚拟服务器功能等来实现搬送模拟装置100的各功能。
[0159]
并且,也可以将搬送模拟装置100设为将搬送模拟装置100的各功能适当地分散给多个服务器的分散处理系统。
[0160]
另外,同样,也可以设为,例如服务器具备第二实施方式所涉及的控制装置400的虚拟物品供给部130a和虚拟物品管理部140a中的一部分或全部。另外,也可以在云上利用虚拟服务器功能等来实现控制装置400的各功能。
[0161]
并且,控制装置400也可以设为将控制装置400的各功能适当地分散给多个服务器的分散处理系统。
[0162]
<变形例2>
[0163]
另外,例如,在上述的第一实施方式和第二实施方式中,对以机器人300进行取出物品等作业为前提的情况下的物品的流动进行了模拟,但是不限定于此。例如,能够在机器人300对物品进行加工、组装、检查、观察等其它的作业的系统中应用搬送模拟装置100、搬送系统2的结构。
[0164]
另外,能够在不使用机器人300的系统中应用搬送模拟装置100、搬送系统2的结构。作为不使用机器人300的系统,也可以采用在虚拟搬送部120或搬送部500的上游侧的规定位置配置多个涂装枪(规定的装置)的自动涂装系统、在虚拟搬送部120或搬送部500的上游侧的规定位置配置清洗喷嘴(规定的装置)的清洗系统等,来代替机器人300。
[0165]
另外,也可以为,在不使用机器人300的系统为检查系统的情况下,例如,在虚拟搬送部120或搬送部500的上游侧配置检查用传感器(规定的装置)来代替机器人300,控制装置400使用检查用传感器的检测图像进行图像处理和判定。
[0166]
<变形例3>
[0167]
另外,例如,在上述的第一实施方式和第二实施方式中,增强现实显示装置200显示机器人300等的现实空间图像和包含虚拟物品71、72等的ar图像,但是不限定于此。例如,也可以设为,增强现实显示装置200能够基于存储部240中存储的ar图像操作程序241,来对虚拟搬送部120、搬送部500的动作、以及由虚拟物品供给部130、130a对虚拟物品71、72的供
给的开始、停止进行操作。
[0168]
此外,第一实施方式所涉及的搬送模拟装置100以及第二实施方式所涉及的搬送系统2所包含的各功能能够通过硬件、软件或它们的组合来分别实现。在此,通过软件实现是指,通过计算机读入并执行程序来实现。
[0169]
程序能够使用各种类型的非瞬态性的计算机可读介质(non-transitory computer readable medium)来保存,并能够提供给计算机。非瞬态性的计算机可读介质包含各种类型的具有实体的记录介质(tangible storage medium:有形存储介质)。非瞬态性的计算机可读介质的例子包含磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、cd-rom(read only memory:只读存储器)、cd-r、cd-r/w、半导体存储器(例如掩模rom、prom(programmable rom:可编程只读存储器)、eprom(erasable prom:可擦除可编程只读存储器)、快闪rom、ram)。另外,程序也可以通过各种类型的瞬态性的计算机可读介质(transitory computer readable medium)来提供给计算机。瞬态性的计算机可读介质的例子包含电信号、光信号以及电磁波。瞬态性的计算机可读介质能够经由电线及光纤等有线通信路径、或无线通信路径来将程序提供给计算机。
[0170]
此外,描述要记录于记录介质的程序的步骤不仅包括根据其顺序按照时间序列进行的处理,还包含并行地或单独地执行的处理,而不必一定按照时间序列进行处理。
[0171]
将以上内容换而言之,本公开的模拟装置和搬送系统能够采取具有如下这样的结构的各种实施方式。
[0172]
(1)本公开的搬送模拟装置100具备:虚拟地进行动作的虚拟搬送部120;虚拟物品供给部130,其以规定的条件向虚拟搬送部120供给虚拟物品71、72;以及虚拟物品管理部140,其与虚拟搬送部120的虚拟的移动相匹配地逐次更新虚拟物品71、72的位置。
[0173]
根据该搬送模拟装置100,能够在与实际的现场同样的环境中准确地模拟物品的流动。
[0174]
(2)在(1)所记载的搬送模拟装置100中,也可以为,虚拟搬送部120具有至少一个虚拟通道121、122,虚拟通道121、122具有虚拟搬送速度,虚拟通道121、122具有用于虚拟地生成虚拟物品71、72的虚拟物品生成位置,虚拟通道121、122朝向与实际要配置的搬送部相同的方向搬送虚拟物品71、72,虚拟物品71、72是在虚拟通道121、122的、以虚拟物品生成位置为基准被施加了随机校正区域131、132内的随机的校正后的位置处生成的。
[0175]
通过这样,能够在每个虚拟通道121、122中搬送不同种类的物品,并能够以不同的供给率搬送物品。另外,通过随机校正,能够确认今后要设置于实际的现场中的机器人等与周边装置是否会发生干扰、或者连接于所述机器人等的线缆是否会发生缠绕等。
[0176]
(3)在(2)所记载的搬送模拟装置100中,也可以为,虚拟物品供给部130具有用于供给虚拟物品71、72的至少一个供给排程a、b、c,供给排程a、b、c包含虚拟物品71、72的供给率,供给排程a、b、c用于以由供给率和虚拟搬送速度决定的间隔来向虚拟通道121、122供给虚拟物品71、72,供给排程a、b、c包含应用供给排程的应用时间、或表示虚拟搬送部120在应用供给排程的期间所移动的移动量的总供给距离,针对虚拟通道121、122的各个虚拟通道执行一个供给排程a、b、c,或者几个供给排程a、b、c的组合。
[0177]
通过这样,能够确认在机器人的取出作业等中是否需要临时放置台的缓冲功能等。
[0178]
(4)在(1)至(3)中的任一项所记载的搬送模拟装置100中,也可以为,还具备增强现实显示装置200,该增强现实显示装置200在由虚拟物品管理部140逐次更新的虚拟物品71、72的位置处显示规定的物品形状。
[0179]
通过这样,增强现实显示装置200的用户能够在实际的现场中没有周边设备的状态下,基于设计阶段的图来确认机器人300等与周边设备的干扰等,能够确认机器人300等的性能是否如期待那样。
[0180]
(5)在(4)所记载的搬送模拟装置100中,也可以为,能够利用增强现实显示装置200来对虚拟搬送部120的动作以及由虚拟物品供给部130对虚拟物品71、72的供给的开始、停止进行操作。
[0181]
通过这样,增强现实显示装置200的用户能够在确定动作的同时,变更虚拟搬送部120的虚拟搬送速度、虚拟物品供给部130的供给排程等。
[0182]
(6)在(1)所记载的搬送模拟装置100中,也可以为,对虚拟物品供给部130供给的虚拟物品71、72附加表示种类的信息。
[0183]
通过这样,增强现实显示装置200的用户能够目视确认被供给的虚拟物品71、72的种类。
[0184]
(7)本公开的搬送系统2具备:搬送部500,其用于搬送物品;脉冲编码器520,其用于检测搬送部500的移动量;虚拟物品供给部130a,其以规定的条件供给虚拟物品71、72;以及虚拟物品管理部140a,其与搬送部500的移动量相匹配地逐次更新虚拟物品71、72的位置。
[0185]
根据该搬送系统2,能够起到与(1)同样的效果。
[0186]
(8)在(7)所记载的搬送系统2中,也可以为,搬送部500具有至少一个虚拟通道501、502,虚拟通道501、502具有用于虚拟地生成虚拟物品71、72的虚拟物品生成位置,虚拟通道501、502朝向与搬送部500相同的方向搬送虚拟物品71、72,虚拟物品71、72是在虚拟通道501、502的、以虚拟物品生成位置为基准被施加了在随机校正区域511、512内的随机的校正后的位置处生成的。
[0187]
通过这样,能够起到与(2)同样的效果。
[0188]
(9)在(8)所记载的搬送系统2中,也可以为,虚拟物品供给部130a具有用于供给物品的至少一个供给排程a1、b1、c1,供给排程a1、b1、c1用于每隔基于搬送部500的移动量的规定的间隔来供给物品,供给排程a1、b1、c1包含应用供给排程的应用时间、或表示搬送部500在应用供给排程的期间所移动的移动量的总供给距离,针对虚拟通道501、502的各个虚拟通道执行一个供给排程a1、b1、c1、或几个供给排程a1、b1、c1的组合。
[0189]
通过这样,能够起到与(3)同样的效果。
[0190]
(10)在(7)至(9)中的任一项所记载的搬送系统2中,也可以为,还具备增强现实显示装置200,该增强现实显示装置200在由虚拟物品管理部140a逐次更新的虚拟物品71、72的位置处显示规定的物品形状。
[0191]
通过这样,能够起到与(4)同样的效果。
[0192]
(11)在(10)所记载的搬送系统2中,也可以为,能够利用增强现实显示装置200来对搬送部500的动作以及由虚拟物品供给部130a对虚拟物品71、72的供给的开始、停止进行操作。
[0193]
通过这样,能够起到与(5)同样的效果。
[0194]
(12)在(7)所记载的搬送系统2中,也可以为,对虚拟物品供给部130a供给的虚拟物品71、72附加表示种类的信息。
[0195]
通过这样,能够起到与(6)同样的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1