矿山事故情景构建模块及应急救援综合培训演练系统的制作方法
1.本发明涉及应急救援训练领域,具体地,涉及一种矿山事故情景构建模块及应急救援综合培训演练系统。
背景技术:
2.应急救援是一项高危作业,需要救援人员具备体能、心理、知识、经验等方面较强的综合能力,是安全高效开展救援,降低事故损失的重要保障。做好救援演练培训是提高救援人员能力的基本途径。矿山救援的主要事故类型包括煤矿井下透水、火灾、瓦斯(煤尘)爆炸、顶板冒落等自然环境灾害。传统的矿山事故演练,主要是在井下生产现场,甚至在地面上假设事故情景,开展一些简单、局部的模拟演练,或者通过授课演示等方式开展培训。由于培训演练水平低,难以满足实际需要,严重阻碍了应急救援能力的提高。基于矿山事故特点,现实中,有效开展应急救援演练面临诸多技术问题,比如瓦斯(煤尘)爆炸等一些事故情景在现实中无法真实再现。由于煤矿等矿山井下安全性要求非常高,复杂事故情景再现布置困难、成本高,现实中难以开展大型复杂事故的协同演练。因此,通过创新演练手段,全面、真实、便捷再现各类复杂事故情景,实现现场救援与场外指挥综合协同演练,具有重要意义。
3.当前,采用虚拟现实技术构建模拟情景的方法都是单独创建模型,然后构建情景。已有三维cad图与虚拟现实技术不兼容,不能得到有效应用;需要专业人员花费较长时间创建模型和情景构建。现实中,企业面临多种事故情景,需要根据企业具体情况及时进行演练,亟待创新情景构建技术,满足现场人员快速完成情景构建需要。
技术实现要素:
4.本发明目的是提供一种矿山事故情景构建模块及应急救援综合培训演练系统,用于解决相关技术存在的问题。
5.根据本发明实施例的第一方面,提供一种矿山事故情景构建模块,转换单元,用于将所述矿山的矿井巷道和开采工作面的cad图转换为所述矿井巷道和所述开采工作面的3d模型;模型单元,用于建立满足所述矿井事故情景所需的情景构建要素模型库,其中,所述情景构建要素模型库包括所述矿井巷道和所述开采工作面的3d模型以及矿山事故要素3d模型;情景单元,用于利用所述矿山模型库中的3d模型,构建所述矿山事故情景。
6.优选的,所述转换单元用于采用如下方式将所述矿井巷道及开采工作面的cad图转换为所述矿井巷道和所述开采工作面的3d模型:解析所述矿井巷道及所述开采工作面的cad图,以得到所述cad图的引导线文件;将所述引导线文件中的引导线转换为nurbs曲线;根据预设的横截面参数,设置所述nurbs曲线的横截面,以得到所述矿井巷道及所述开采工作面初始模型;将所述矿井巷道及所述开采工作面初始模型中的相交部分连通,以得到所述矿井巷道及所述开采工作面的3d模型。
7.优选的,所述模型单元还用于建立所述矿山事故要素3d模型;所述矿山事故要素
3d模型包括:开采设备3d模型、运输设备3d模型、掘进设备3d模型、其他机电设备3d模型、通风设施3d模型、防护设施3d模型、遇险人员3d模型、救援人员3d模型。
8.优选的,所述情景单元还用于:利用所述情景构建要素模型库中的3d模型构建矿山事故基础情景模式;根据演练脚本设定要求调整所述基础情景模式中的3d模型,以得到不同的所述矿山事故情景。
9.根据本发明实施例的第二方面,提供一种矿山应急救援综合培训演练系统,所述演练系统包括:第一方面或者第一方面任一项所述的情景构建模块,用于构建事故情景;情景显示模块,用于显示所述事故情景以及演练人员所采取的相应救援演练活动的事故救援场景;智能教鞭模块,用于所述演练人员与所述事故情景交互,完成相关救援演练活动;指挥平台模块,用于远程同步显示所述事故群殴美国控以及用于指挥人员与所述演练人员互动,指挥和控制所述救援演练活动。
10.优选的,所述情景显示模块包括显示控制主机、几何校正处理器、投影机组件、环幕;所述显示控制主机将所述事故情景的画面通过所述几何校正处理器进行处理后,利用所述投影机组件将处理后的事故情景的画面投射到所述环幕上;所述环幕包括120度环幕、180度环幕、360度环幕。
11.优选的,所述几何校正处理器用于采用如下方式对所述事故情景的画面进行处理,包括:基于所述事故情景的画面,得到所述事故情景的画面的图像像素阵列图;基于算法公式计算,将所述图像像素阵列图转换成适配于所述环幕的图像像素阵列图,以得到校正处理后的事故情景的画面。
12.优选的,所述算法公式包括:
[0013][0014]
s
i
=l(tan(iα)
‑
tan((i
‑
1)α));
[0015]
其中,l为所述演练人员与所述环幕的水平距离,h为所述环幕的高度,h为所述演练人员的身高高度,n为所述环幕的图像像素行数,α为所述两行间图像像素点之间的夹角,s
i
为任意连续两行间图像像素点的距离,i为像素行数序号。
[0016]
优选的,所述智能教鞭模块包括红外教鞭和红外光学摄像头;所述红外教鞭用于在所述环幕显示的事故情景的画面上投射红外光信号;所述红外光学摄像头用于根据所述红外光信号在所述环幕上显示的红外发光点,以定位所述红外教鞭在所述环幕上指向的位置并通过捕捉所述环幕显示的事故情景的画面,使得所述红外教鞭在所述位置对应的画面上进行操作。
[0017]
优选的,所述红外教鞭包括手柄且在所述手柄上设置滑轮和鼠标键;所述红外教鞭的长度为大于等于0.5米;所述红外教鞭包括2个红外发光装置,且所述2个红外发光装置之间的直线距离小于等于0.3米;所述红外教鞭用于通过所述滑轮和所述鼠标键,对所述环幕上显示的画面进行暂停和回放以及对所捕捉的画面中的物体进行点击或者拖动。
[0018]
优选的,所述指挥平台模块包括显示屏、麦克风、监听音箱和操控单元;所述显示屏用于分时或分区显示所述事故情景和所述事故救援场景;所述麦克风用于所述指挥人员对所述演练人员发出指令;所述监听音箱用于监听所述事故救援场景的声音情况及所述演练人员向所述指挥人员的语音报告情况;所述操控单元用于对所述事故情景及所述救援演
练活动的过程进行操作控制。
[0019]
优选的,控制子单元,用于所述指挥人员控制所述救援演练活动的进程和状态以及调整所述事故情景设置;存储子单元,用于存储所述救援演练活动的过程;回放子单元,用于将所述存储模块中的救援演练活动的过程进行调取和回放;评价子单元,用于所述指挥人员对所述救援演练活动的效果进行分析评估,并提出相应的改进措施。
[0020]
通过上述技术方案,可以根据不同的演练脚本快速搭建矿山事故情景,从而可以模拟多种矿井事故的发生。同时,通过包含该情景构建模块的应急救援综合培训演练系统,对演练人员针对不同的事故情景进行救援演练综合培训,大大提高演练人员针对不同矿山事故的救援应急技能。
附图说明
[0021]
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
[0022]
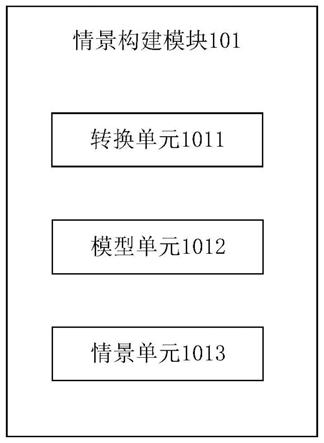
图1是根据一示例性实施例示出的一种矿山事故情景构建模块示意框图;
[0023]
图2是根据一示例性实施例示出的一种矿井巷道cad示意图;
[0024]
图3是根据一示例性实施例示出的一种矿井巷道cad产生的nurbs曲线示意图;
[0025]
图4是根据一示例性实施例示出的一种基于nurbs曲线生成的矿井巷道3d初始模型示意图;
[0026]
图5是根据一示例性实施例示出的一种矿井巷道初始模型相交贯通的示意图;
[0027]
图6是是根据一示例性实施例示出的一种矿井巷道3d模型示意图;
[0028]
图7是根据一示例性实施例示出的一种矿山应急救援综合培训演练系统示意框图;
[0029]
图8是根据一示例性实施例示出的一种情景显示模块示意框图;
[0030]
图9是根据一示例性实施例示出的一种投影机组件布置示意图;
[0031]
图10是根据一示例性实施例示出的一种未经校正的图像像素阵列示意图;
[0032]
图11是根据一示例性实施例示出的一种校正前后的图像像素阵列对比示意图;
[0033]
图12是根据一示例性实施例示出的一种等边视角示意图;
[0034]
图13是根据一示例性实施例示出的一种等角视角示意图;
[0035]
图14是根据一示例性实施例示出的一种红外教鞭应用示意图;
[0036]
图15是根据一示例性实施例示出的一种红外教鞭结构示意图;
[0037]
图16是根据一示例性实施例示出的一种指挥平台模块示意框图;
[0038]
图17是根据一示例性实施例示出的一种操控单元示意框图。
[0039]
附图标记说明
[0040]1ꢀꢀꢀꢀꢀꢀ
环幕
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
投影机
[0041]3ꢀꢀꢀꢀꢀꢀ
红外教鞭
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
红外光学摄像头
[0042]5ꢀꢀꢀꢀꢀꢀ
手柄
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑轮
[0043]7ꢀꢀꢀꢀꢀꢀ
鼠标键
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ8ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
红外发光装置
[0044]9ꢀꢀꢀꢀꢀꢀ
红外发光装置
具体实施方式
[0045]
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
[0046]
图1是根据一示例性实施例示出的一种矿山事故情景构建模块示意框图。如图1所示,情景构建模块101包括:转换单元1011,用于将所述矿山的矿井巷道和开采工作面的cad图转换为所述矿井巷道和所述开采工作面的3d模型;模型单元1012,用于建立满足所述矿山事故情景所需的情景构建要素模型库,其中,所述情景构建要素模型库包括所述矿井巷道和所述开采工作面的3d模型以及矿山事故要素3d模型;情景单元1013,用于利用所述矿山模型库中的3d模型,构建所述矿山事故情景。本公开实施例的情景构建模块可以将矿井巷道或采煤工作面分布转化成相应的3d模型,进而利用矿井巷道和开采工作面3d模型以及矿山事故要素3d模型构建矿山事故情景。
[0047]
下面针对上述情景构建模块的各个单元功能以进一步说明。
[0048]
本公开实施例中,转换单元首先需要解析矿井巷道或开采工作面cad图,以得到所述矿井巷道或开采工作面的cad图引导线文件。具体的,在矿井设计阶段,完成矿井巷道及开采工作面技术设计,生成相应的cad图。或者是在实际的矿井中,一般会分布多个摄像装置,通过摄像装置对矿井内部分布进行拍照,得到内部分布的实际图像,进而转化为相应的cad图。
[0049]
图2是根据一示例性实施例示出的一种矿井巷道cad示意图,如图2所示,矿井的cad图有效的展示了矿井各个巷道的分布以及相互的连接情况。通过上述解析方法将如图2中矿井巷道cad图解析,得到矿井巷道cad图的引导线文件。
[0050]
进一步的,将得到的引导线文件中的引导线转换为nurbs曲线。图3是根据一示例性实施例示出的一种矿井nurbs曲线示意图。如图3所示,本公开实施例示采用nurbs建模方式对矿井内部巷道进行建模。考虑到矿井内部地形以及巷道分布的特殊性,相比传统的网络建模方式,nurbs可以更好的控制曲线度,有利于将矿井巷道分布真实展示。
[0051]
进一步的,根据预设的横截面参数,设置nurbs曲线的横截面,以得到矿井巷道和开采工作面的初始模型。由图3可以看出,图3的nurbs曲线图为平面效果的,为了得到矿井巷道3d模型图,需要将图3中平面效果的曲线图转换为三维立体效果形式。具体的,图4是根据一示例性实施例示出的一种基于nurbs曲线生成的矿井巷道3d初始模型。如图4所示,根据矿井内部巷道结构特点,可以预设巷道横截面参数,从而基于预设的横截面参数,设置nurbs曲线横截面,从而得到图4中的矿井巷道初始模型。
[0052]
进一步的,由于在图4中的矿井巷道初始模型中,各个矿井巷道相交的部分是未连通的,则需将巷道初始模型中的相交部分连通,以得到矿井巷道3d模型图。图5是根据一示例性实施例示出的一种矿井初始模型相交贯通示意图。如图5所示,本公开实施例采用hardmesh技术,将矿井初始模型中的巷道相交部分连通,得到图6中的矿井巷道3d模型。
[0053]
因此,通过上述构建矿井巷道3d模型过程可以看出,本公开实施例可以将实际矿井巷道或者开采工作面的内部结构,以3d模型的形式模拟展现,建立多种矿井巷道或采煤工作面的3d模型。
[0054]
本公开实施例中,模型单元用于建立满足所述矿井事故情景构建所需的情景构建要素模型库,其中,所述情景构建要素模型库包括所述矿井巷道和所述开采工作面的3d模
型以及矿山事故要素3d模型。本公开实施例中,所述模型单元还用于建立所述矿山事故要素3d模型;所述矿山事故要素3d模型包括:开采设备3d模型、运输设备3d模型、掘进设备3d模型、其他机电设备3d模型、通风设施3d模型、防护设施3d模型、遇险人员3d模型、救援人员3d模型。模型单元可以基于不同矿山事故类型和特点,建立多种不同类型的矿山事故要素3d模型,以使得情景单元可以构建多种具体矿山事故情景。其中每个矿山事故要素3d模型还可以设置不同模型参数。具体的,例如开采设备3d模型中包括采煤支架3d模型,采煤支架3d模型可以设置3米、5米、7米等不同的支护高度参数。在运输设备3d模型可以包括刮板运输机3d模型和皮带机3d模型,同时针对相应的模型可以设置不同的宽度和长度参数。又例如在通风设施3d模型中可以包括u型通风3d模型、y型通风3d模型等。井下人员3d模型可以包括生产作业人员3d模型、检查人员3d模型、管理人员3d模型等。可以看出,模型单元可以根据矿山内部分布以及矿山事故的特点,按照预设的类型建立矿山要素3d模型,以满足各类事故情景构建需要。
[0055]
进一步的,情景单元1013还可以利用所述情景构建要素模型库中的3d模型构建矿山事故基础情景模式;根据演练脚本设定要求调整所述基础情景模式中的3d模型,以得到不同的所述矿山事故情景。具体的,情景单元可以从情景构建要素模型库中提取相应的矿井事故要素3d模型,以应急救援的基本环节要求为演练主线,根据各类事故基本特征,事故发生、事态扩大、复杂变化规律,构建各类矿山事故应急救援培训演练的基础情景模式(也称典型事故情景)。矿山事故类型包括瓦斯爆炸、火灾、透水、顶板冒落等,事故特征包括事故灾害程度、发生地点、形成原因、遇险人员数量、损坏程度等,应急救援的基本环节包括接警、出警、事故信息、部署任务、建立井上下救援基地、应急处置、现场恢复等。进而根据演练脚本的设定要求,对基础情景模式进行修改,如调整要素3d模型的类型,改变要素3d模型参数、设置位置等,以满足快速构建符合演练脚本所设定要求的具体矿山事故情景。例如,井下火灾为常见主要典型事故之一,产生火灾原因分为煤炭自燃及外部火源引起等;地点包括采煤工作面、采空区、皮带运输机等;影响的区域可以是井下全部也可是局部区域;遇险人员人数可以是零星少数作业人员,也可是数十甚至上百人员的作业队伍等,通过情景单元,可以根据井下火灾的事故特点,按照具体演练脚本设定要求,构建相应的火灾事故基础情景模式,通过对基础模块中,例如遇险人员3d模型或者是皮带运输机3d模型的修改,可以快速有针对性的构建同类型火灾事故情景模式。
[0056]
综上,本公开实施例的情景构建模块可以将多种不同矿山矿井分布真实再现,进而根据演练脚本构建多种类矿山事故应急救援培训演练所需的事故情景,尤其是现实中不易实现的如瓦斯爆炸等都可以进行模拟再现。而基于构建的矿山事故基础情景模式,可以根据演练要求进一步修改,以实现快速有针对性构建矿山事故情景。
[0057]
图7是根据一示例性实施例示出的一种矿山应急救援综合培训演练系统示意框图。如图7所示,矿山应急救援综合培训演练系统100包括情景构建模块101,用于构建事故情景。情景显示模块102,用于显示所述事故情景以及演练人员采取相应救援演练活动的事故救援场景。智能教鞭模块103,用于所述演练人员与所述事故情景交互,完成相应救援演练活动。指挥平台模块104,用于远程同步显示所述事故情景和所述事故救援场景,以及用于指挥人员与所述演练人员互动,以指挥和控制所述救援演练活动。该演练系统可以将现实的事故情景进行模拟展示,演练人员可以根据不同的事故情景进行救援演练,提高应对
不同事故情景的救援能力,同时指挥人员可以根据相应的事故情景做出正确救援决策,指挥演练人员开展救援行动,进而提高复杂事故状况下的应急决策指挥水平。
[0058]
下面针对上述救援演练系统的各个模块功能进一步详细说明。
[0059]
情景构建模块用于构建事故情景。具体的可参考上述关于情景构建模块的描述。需要说明的是,情景构建模块在演练救援系统中可以理解为一种模拟软件,其可以安装于终端上,例如计算机,平台或者手机上,通过通讯网络与各个模块进行有效通讯连接,传输相应事故情景。
[0060]
通过上述情景构建模块,可以将真实事故情景进行模拟再现,尤其是无法在现实现场展示的事故情景,例如井下瓦斯爆炸、透水等事故类型,还可以针对预期可能发生的各种事故情景进行模拟展示,使得演练人员可以针对多种事故情景进行救援演练。
[0061]
本公开实施例中,图8是根据一示例性实施例示出的一种情景显示模块示意框图。如图8所示,情景显示模块102包括显示控制主机1021、几何校正器1022、投影机组件1023、环幕1024。显示控制主机1021将构建的事故情景的画面通过几何校正处理器1022进行处理后,利用投影机组件1023将处理后的事故情景的画面投射到环幕1024上。其中,本公开示例的环幕可以是各种弧度的环幕,例如,可以是120度环幕、180度环幕或者是360度环幕。根据不同弧度环幕配置相应投影机组件,将事故情景投射到环幕上。可以看出,情景显示模块将构建的事故情景画面进行处理并采用环幕进行显示,使得演练人员如同身临事故现场,更为真实地体验事故现场状况。
[0062]
举例说明,本公开实施例是为了能够真实模拟再现矿井事故情景,环幕的高度可以设置为与实际矿井巷道的高度一致,投影机组件可以包括多个投影机,分别对环幕的不同区域投射画面。例如,如图3所示,环幕1高度可以设置为3.5米,环幕1直径可以设置为12米。投影机组件可以包括6个均匀分布的投影机2,该6个均匀分布的投影机2将事故情景画面投射到环幕1上,经过技术处理,防止不同投影机在环幕上投射的画面重叠或出现缝隙,以实现在环幕1上可以完整显示整个事故情景画面。
[0063]
一种实施方式中,几何校正器用于对事故情景画面进行处理,包括:基于事故情景,得到所述事故情景图像像素阵列图。根据算法公式计算,将图像像素阵列图转换成适配于所述环幕的图像像素阵列图,以得到校正处理后的事故情景画面。图10是根据一示例性实施例示出的一种未经校正的图像像素阵列示意图,如图10所示,像素阵列图中多个图像像素点成等距阵列排布,以该种像素阵列图形成的画面投射到环幕上时,演练人员在场地中心向环幕上方或下方观看画面时感到压缩变形,使得演练人员在长时间观看环幕下产生眩晕感。因此,需要将该图像像素阵列图进行技术处理,对事故情景画面进行局部拉伸处理,转换成适于演练人员观看的环幕图像像素阵列图。本公开实施例采用等距转等角原理对图像像素阵列图进行技术处理,根据演练人员与环幕的位置距离,采用算法公式进行计算,经几何处理器,得到处理后的像素阵列图。图11是根据一示例性实施例示出的校正前后的图像像素阵列对比示意图,如图11所示,处理后的图像像素阵列图的像素点较之处理之前像素点的距离发生变化,对于演练人员的视角来说校正为等角分布,从而解决了演练人员长时间观看环幕产生晕眩感的问题。
[0064]
上述通过对事故情景画面进行处理,基于演练人员与环幕之间的位置距离,调整事故情景画面的图像像素点分布,从而避免演练人员在长时间观察环幕时出现眩晕感问
题,有效的提升了演练人员的视觉体验。
[0065]
本公开实施例中,采用等距转等角原理的具体计算过程如下:
[0066]
如图12所示,当图像投影到环幕上,在未经几何校正器处理前,相邻两行间图像像素点是等距的(图12中s0),当演练人员观看环幕时,针对环幕上的像素点的视角并不相同(如图12中的α1、α
i
‑1)。如图12中所示:
[0067]
环幕上两行间图像像素点夹角和距离采用如下公式计算得到:
[0068]
环幕上任两个像素点的距离:
[0069]
环幕上任两个像素点的夹角:
[0070]
由上述公式可知,由于像素点均匀等距分布,造成演练人员对环幕的观看视角的角度不同,从人眼水平线向上或向下,视角角度逐渐减小,向环幕上方或下方观看画面时感到压缩变形,这使得演练人员在长时间观看环幕时会产生眩晕感。为了解决该问题,就需要将图12中的角度校正为相同的角度,具体如下:
[0071]
如图13所示,通过几核处理器,将演练人员视点投出的角度等分为相同角度(图13中α),环幕上两行间图像像素点夹角和距离采用如下公式计算得到:
[0072]
环幕上相邻两行间图像像素点的夹角:
[0073]
环幕上相邻两行间图像像素点的距离:s
i
=l(tan(iα)
‑
tan((i
‑
1)α))
[0074]
其中,l为所述演练人员与所述环幕的水平距离,a为环幕上端点,b为环幕下端点。h为所述环幕高度,h为演练人员的身高高度,n为环幕上图像像素行数,x0为人眼水平线与所述环幕交叉行上的图像像素点,x
i
‑1、x
i
为所述环幕上相邻两行上的图像像素点,α为相邻两行间图像像素点之间的夹角,s
i
为相邻两行间图像像素点的距离,i为像素行数序号。
[0075]
可以看出,通过上述角度计算,原等距图像像素阵列中,相邻两行间像素点之间的距离发生变化,局部像素点拉伸,从而满足演练人员面向环幕时所观看到环幕任意画面中的像素点的角度是相等的。像素阵列图经过几何校正器处理,图像像素阵列由等距变换成等角,形成适配于环幕的图像像素阵列图。
[0076]
本公开实施例中,如图14所示,智能教鞭模块包括红外教鞭3和红外光学摄像头4。红外教鞭3用于向环幕1发射红外光信号,在环幕1上形成红外发光点,使得演练人员可以手持红外教鞭3与环幕1上显示的事故情景画面进行互动,进行相应的救援演练活动。红外光学摄像头4用于捕捉红外发光点指向环幕上的情景画面,定位红外教鞭3在环幕上所指向的画面位置。例如,如图8所示,投影机2将火灾事故情景画面投射到环幕1上,演练人员需要利用红外教鞭3针对画面中的着火点进行操作。首先,演练人员利用红外教鞭3发射红外光信号到画面中所要操作的着火点位置。红外光学摄像头4同时捕捉到环幕上的红外发光点,以用来定位红外教鞭3所指向的位置,即画面中的着火点位置。最后,演练人员则通过红外教鞭3对着火点进行相应灭火救援操作,以完成所要求的事故救援任务。
[0077]
一种实施方式中,图15是根据一示例性实施例示出的一种红外教鞭示意图。如图15所示,红外教鞭3包括手柄5且在所述手柄上设置滑轮6和鼠标键7。红外教鞭长度大于等于0.5米。红外教鞭手柄5上设置红外发光装置8和红外发光装置9,共同发射红外光信号到
环幕上确定指向位置,且所述2个红外发光装置之间的直线距离小于等于0.3米。当演练人员点击鼠标键,可对救援场面进行暂停和回放;当演练人员手指滚动滑轮,红外教鞭在环幕上的指向位置发生变化,当红外教鞭在环幕上点击相应物体时,可以对显示的物体进行拖动等。
[0078]
由上述实施例可以看出,采用智能教鞭模块,实现演练人员和事故情景进行有效互动,完成并在环幕上显示出现场救援人员采取的救援行动;另外通过对事故情景的暂停、回放,可以实现对事故进行分析。通过演练人员对事故情景中的事故要素(物体)的拖动,可对事故未来发展情景预想,使得演练人员能够更为广泛的开展救援演练活动。
[0079]
本公开实施例中,图16是根据一示例性实施例示出的一种指挥平台模块示意框图。如图16所示,指挥平台模块104包括显示屏1041、麦克风1042、监听音箱1043和操控单元1044;显示屏1041用于分时或分区显示所述事故情景和所述事故救援场景;麦克风1042用于所述指挥人员对所述演练人员发出指令;监听音箱1043用于监听所述事故救援场景的声音情况及所述演练人员向所述指挥人员的语音报告情况;操控单元1044用于对所述矿山事故情景及所述救援演练活动的过程进行操作控制。指挥平台模块用于同步显示事故救援场景,并用于指挥人员根据救援状况向演练人员发出相应的指令。具体的,指挥平台模块可以同步显示情景显示模块所显示的事故情景及现场演练人员的救援场面。针对各类矿山事故,指挥人员根据事故救援演练进程,可以实时向演练人员发出行动指令。指挥人员还可以实时对演练效果进行判断,提出更为有效的救援方案,有效提高临场指挥水平和协同救援的能力。另外,通过指挥平台模块,指挥人员可以实时观察演练人员的救援行动,并与演练人员进行互动,通过观察,及时纠正错误行为,提高整体演练效果。
[0080]
一种实施方式中,如图17所示,操控单元1044包括:控制子单元10441,用于所述指挥人员控制所述救援演练活动的进程和状态以及调整所述救援演练活动的事故情景设置;存储子单元10442,用于存储所述救援演练的过程;回放子单元10443,用于将所述存储模块中的救援演练活动的过程进行调取和回放;评价子单元10444,用于所述指挥人员对所述救援演练活动的效果进行分析评估,并提出相应的改进措施。通过上述模块,可以对演练过程进行调整和控制,同时还可以对演练人员的救援行动过程进行存储和分析,针对发现的问题,提出改进和完善措施,纠正演练人员的救援行为,进一步提高演练人员的救援水平。
[0081]
综上所述,矿山应急救援综合培训演练系统通过情景构建模块能够构建多种类型矿山事故情景,并通过情景显示模块将现实事故情景真实模拟再现,通过智能教鞭模块能够实现演练人员与虚拟事故情景间的交互,通过指挥平台模块能够实现现场救援人员与场外指挥人员间的互动,协同救援,满足了应急救援培训演练的实际需要,有利于提高演练人员的救援行动能力及指挥人员的决策指挥水平。优选的,对投影曲面进行校正,防止演练人员产生眩晕感。
[0082]
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征。
[0083]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1