光学导航装置、光学传感器装置及方法与流程
1.本技术涉及一种光学导航装置,特别有关于一光学导航装置、一光学传感器装置以及应用于一光学导航装置的方法。
背景技术:
2.一般来说,对于一个传统的光学导航装置(特别是高效能表现的电竞鼠标装置)而言,如今其最低要求的帧率一般正常会保持在1kfps(亦即每秒1千张图帧),使其能够相同于该高效能表现的电竞鼠标装置的通用串行总线每1毫秒回报一次位移变动所相应的一回报频率,以保持变动回报(delta reporting)的一致性。然而,每秒1千张图帧的最低帧率要求会限制电竞传感器能力,无法在低速操作实现较低功率消耗的效果。
技术实现要素:
3.因此本技术的目的之一在于公开一种光学导航装置及一种光学传感器装置以解决上述提到的难题。
4.根据本技术的实施例,其公开了一种光学导航装置。光学导航装置用来基于传输接口来与远程计算机装置进行通信,并包括一控制器与一光学传感器装置。控制器通过传输接口来耦接至远程计算机装置,并用来基于所述传输接口所规范的特定轮询频率来输出光学传感器装置所产生的合成位移数据至所述远程计算机装置。所述光学传感器装置耦接至所述控制器,并用来根据特定帧率来产生所述合成位移数据以及接着输出所述合成位移数据至所述控制器。所述特定帧率较低于所述传输接口所规范的所述特定轮询频率;以及,所述光学传感器装置能够根据所述特定帧率来捕捉多个图像帧以得到所述多个图像帧所相应的实际位移数据、基于所述实际位移数据来产生预测的位移数据以及使用所述实际位移数据与所述预测的位移数据来形成要被输出至所述控制器的所述合成位移数据。
5.根据本技术的实施例,其公开了一种光学传感器装置。光学传感器装置用来基于传输接口来与远程计算机装置进行通信,并包括有一感测单元与一处理电路。感测单元用来根据特定闪光频率来接收并感测从所述光学导航装置所移动的表面所反射的光线,所述特定闪光频率低于所述传输接口的特定轮询频率。处理电路耦接至所述发光单元,并用来根据特定帧率来捕捉多个图像帧以产生实际位移数据与预测的位移数据来形成合成位移数据,所述合成位移数据从所述光学导航装置被输出至所述远程计算机装置。
6.根据本技术的实施例,其公开了一种应用于光学导航装置的方法。所述光学导航装置基于传输接口来与远程计算机装置进行通信,以及所述方法包括:根据特定帧率来捕捉多个图像帧以得到所述多个图像帧所相应的实际位移数据,所述特定帧率低于所述传输接口所规范的特定轮询频率;基于所述实际位移数据,产生预测的位移数据;使用所述实际位移数据与所述预测的位移数据来形成要被输出的合成位移数据;以及基于所述传输接口所规范的所述特定轮询频率,输出所述合成位移数据至所述远程计算机装置。
7.根据本技术的实施例,其公开了一个在低速度时的新颖的光学导航内插或外插算
法/机制以能够使用具有较高效能表现的电竞传感器、将其操作在低于该最低的/协议后的轮询频率限制所相应的一帧率(例如每秒1千张图帧)而同时能够维持/保持位移变动回报的一致性。
附图说明
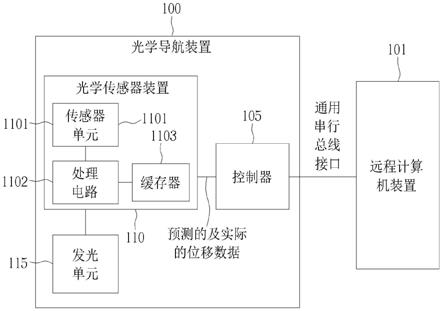
8.图1为根据本技术一实施例一光学导航装置基于一传输接口例如通用串行总线传输接口来与一远程计算机装置进行通信的方块示意图。
9.图2为根据本技术一实施例图1的光学导航装置操作于一高速追踪模式或一节能模式的范例示意图。
10.图3为根据本技术另一实施例图1的光学导航装置操作于一高速追踪模式或一节能模式的范例示意图。
11.图4为根据本技术另一实施例图1的光学导航装置操作于一高速追踪模式或一节能模式的范例示意图。
12.图5为根据本技术另一实施例图1的光学导航装置操作于一高速追踪模式或一节能模式的范例示意图。
13.图6为根据本技术另一实施例图1的光学导航装置操作于一高速追踪模式或一节能模式的范例示意图。
14.其中,附图标记说明如下:
15.100
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学导航装置
16.101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
远程计算机装置
17.105
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制器
18.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
光学传感器装置
19.115
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
发光单元
20.1101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传感器单元
21.1102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
处理电路
22.1103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
缓存器
具体实施方式
23.本技术旨在于公开一种光学导航装置,该光学导航装置能够支持相应于不同的轮询/回报频率(或最低的轮询/回报频率(polling/reporting rate))需求的一或多个操作模式,该些轮询/回报频率是分别由中间的传输接口所规范,亦即该光学导航装置的回报频率例如亦可视为是传输接口的轮询频率,该传输接口例如是该光学导航装置与远程计算机装置(例如主机个人计算机)之间的通用串行总线(usb)传输接口。
24.在一或每一操作模式,该光学导航装置能够根据一可调整/可变帧率(variable frame rate,vfr)来捕捉多个图帧以产生位移/位置数据,接着基于所规范的轮询频率以及通过该通用串行总线传输接口将该位移/位置数据回报给该远程计算机装置,其中该可调整/可变帧率是较高于、等于或等效于该最低轮询频率。此外,该光学导航装置能够根据较低于上述轮询频率(或最低轮询频率)的该可变帧率来捕捉多个图帧以节省较多电源以及同时在这个情况中能够产生一预测的位移数据以使用一实际位移数据与该预测的位移数
据来形成一合成位移数据,并接着基于所规范的轮询频率以及通过该通用串行总线传输接口将该合成位移数据回报给该远程计算机装置。
25.该光学导航装置举例来说是一光学导航鼠标装置,该一或多个操作模式可以包括相应于一较高轮询频率(例如高于或等于1khz的轮询频率,但不限定)之需求的一高速追踪模式以及相应于一较低轮询频率(例如低于1khz的轮询频率,但不限定)之需求的一节能模式,该传输接口举例来说是定义或规范了较高轮询频率之需求与较低轮询频率之需求的通用串行总线传输接口。
26.在每一操作模式中(该高速追踪模式与节能模式的任一个),该光学导航装置能够用来预测该光学导航装置的位移/移动以产生一预测的位移数据以及结合或组合该预测的位移数据与从一或多个所捕捉的图像所直接产生出的一实际位移数据来形成一合成位移数据,其中所形成的合成位移数据的数据量符合了该高速追踪模式中所定义的较高图帧回报频率的需求,因此该光学导航装置可以降低其本身的帧率及发光频率来节省更多电源,特别对于该高速追踪模式来说,更能够有效地节省电源。例如,在该高速追踪模式,较高图帧回报频率的需求通常所定义的是指该最低回报频率须等于1khz(但不限定),应注意的是,为了在该高速追踪模式中节省更多电,该光学导航装置可以降低其可变帧率但不降低最低回报频率的需求。
27.图1是根据本技术一实施例基于例如通用串行总线传输接口(但不限定)来与远程计算机装置101进行通信的光学导航装置100的方块示意图,该光学导航装置100举例来说是进行光学导航追踪的鼠标装置,例如是具有高速效能表现的电竞鼠标装置(但不限定),而该远程计算机装置101是主机装置,例如是个人计算机,该个人计算机能够通过周期地发送一轮询请求并通过该通用串行总线传输接口将该轮询请求传送至该光学导航装置100以轮询(polling)该光学导航装置100,令该光学导航装置100回报该光学导航装置100的位移/位置数据。举例来说,如果最低的轮询频率(即最低的回报频率)需要至少等于1khz,则该光学导航装置100最低需求是至少最慢需要在每1毫秒(millisecond)时就要通过该通用串行总线传输接口将一位移数据回报给该远程计算机装置101;然而,这并非是本技术的限制。
28.该光学导航装置100包含有一控制器105(例如微控制器mcu)、一光学传感器装置110以及一发光单元115(例如是发光二极管led)。该光学传感器装置110包含有一传感器单元1101、一处理电路1102以及一缓存器1103。该控制器105通过该通用串行总线传输接口来耦接至该远程计算机装置101。该光学传感器装置110耦接至该控制器105以及也耦接至该发光单元115。该处理电路1102耦接至该传感器单元1101以及也耦接至该缓存器1103。该光学传感器装置110耦接至该控制器105并用来根据一可调整/可变帧率来产生该合成位移数据以及接着输出该合成位移数据至该控制器105,该可调整/可变帧率较低于该通用串行总线传输接口所规范的该特定轮询频率,此外,该光学传感器装置110能够根据该可调整/可变帧率来捕捉多个图像帧以得到该所捕捉的多个图像帧所相应的实际位移数据、基于该实际位移数据来预测并产生另一位移数据以及使用该实际位移数据与该预测的位移数据来形成将要被输出至该控制器105的该合成位移数据。
29.在一实施例,在每一图帧的起始,该处理电路1102控制并提供电流脉冲给该发光单元115,令该发光单元115发光/闪光至该光学导航装置100所移动的一工作表面;也就是
说,该闪光频率或发光频率会等于或符合该帧率。另外,在一实施例,对于该些图帧的一部分而言,该处理电路1102可以不提供电流脉冲给该发光单元115使其不闪光,也就是说,该闪光频率或发光频率可以低于该帧率,并且其可以由该处理电路1102所动态控制。
30.该处理电路1102接着控制该传感器单元1101接收并感测从该工作表面来的反射光以捕捉一或多个图帧或是一或多个图像,该处理电路1102接着进行数字信号处理以及根据所捕捉的一或多个图帧来执行导航引擎/操作来产生实际位移数据,其中该导航引擎可以是硬件、软件或是其组合。该处理电路1102所产生的该实际位移数据接着被传送至并储存于该缓存器1103中。此外,在产生该实际位移数据之后,如果有需要的话,该处理电路1102可以一次地或多次地进行预测并产生位移数据的操作,而该所预测的位移数据接着会被传送至该缓存器1103以更新该缓存器1103中所储存的该实际位移数据或是更新该缓存器1103中所储存的前一次预测的位移数据。
31.实作上,一组实际位移数据包括有分别与两个坐标轴有关的两个实际变动值(delta value),亦即x轴的实际变动值与y轴的实际变动值,例如,x轴的实际变动值与y轴的实际变动值会分别相应于x轴、y轴的两实际移动差值,或其分别相应于x轴、y轴的两实际移动平均差值,或其分别相应于上述实际移动差值与实际移动平均差值的多种组合。相似地,一组预测的位移数据包括有分别与两个坐标轴有关的两个预测变动值,亦即x轴的预测变动值与y轴的预测变动值,例如,x轴的预测变动值与y轴的预测变动值会分别相应于x轴、y轴的两预测移动差值,或其分别相应于x轴、y轴的两预测移动平均差值,或其分别相应于上述预测移动差值与预测移动平均差值的多种组合。应注意,上述实施变型均并非是本技术的限制。
32.该控制器105可以得到或取得该缓存器1103中目前所储存的位移数据,以使用所得到的数据信息作为该合成位移数据,也就是说,该合成的数据可以是实际数据、该实际数据与该预测的数据的组合或是被该预测的数据所更新的实际数据所形成,以及控制器105可以基于该通用串行总线传输接口所规范的该特定轮询频率(或最低轮询频率)来输出该合成位移数据至该远程计算机装置101。举例来说(但不限定),由于该通用串行总线传输接口的最低轮询频率是1khz,所以该控制器105可以在每1毫秒时去得到或取得该缓存器1103中目前所储存的位移数据的信息。
33.该处理电路1102能够根据较高于该最低轮询频率的一可变帧率或是较高于该通用串行总线传输接口中所规范的特定轮询频率的一可变帧率,来产生足够的实际位移数据至该缓存器1103中,而其也可以根据较低于该最低轮询频率的一可变帧率或是较低于该特定轮询频率的一可变帧率来产生实际位移数据以及另外预测足够的位移数据来更新该实际位移数据,使得等效上形成足够的合成位移数据,及时地或立即地反映出该光学导航装置100的位置或移动。
34.也就是说,为了节省更多电源,产生该实际位移数据的频率及发光频率两者在平均上均低于该最低轮询频率或低于该特定/协议的轮询频率(亦即回报频率),而产生该实际位移数据再加上所计算产生的该预测的位移数据的频率则符合或等于该最低轮询频率或该特定/协议的轮询频率,这表示了对于该控制器105(或对于该远程计算机装置101)来说,在该缓存器1103中目前所储存的位移数据的更新后信息无论是平均来说时实时来说都是适用的或可用的(available),能够精确地反映出该光学导航装置100的移动。
35.图2是根据本技术一实施例该光学导航装置100操作于一高速追踪模式的范例示意图,该光学导航装置100例如是一要求高效能表现的电竞鼠标,该通用串行总线传输接口中所规范的该最低轮询频率设定为1khz,在这个例子中,该光学导航装置100能够用来控制该光学传感器装置110操作在等于或符合于该最低轮询频率的帧率来捕捉一或多个图像以产生并储存足够的实际位移数据至该缓存器1103,其中该帧率举例来说是1kfps(亦即每秒1千张图帧)以保持位移变动的回报与相应于每1毫秒回报的该通用串行总线的轮询频率之间的一致性。
36.在一或每一图帧的起始时,该光学传感器装置105用来提供电流脉冲给该发光单元115以发光至该光学导航装置100所置放其上的该工作表面,以令该传感器单元1101接收并感测该从工作表面来的反射光线,以获取一或多个图像。如图2所示,多个发光二极管的电流脉冲时间分别显示了是在不同的图帧提供电流脉冲给该发光单元115以控制该发光单元115的发光时间。接着,在光感测操作完成之后,该处理电路1102进行数字信号处理以及进行或使用该光学导航引擎以计算该些变动值(亦即x轴与y轴的该些实际移动差值、该些实际移动平均差值或该些实际移动差值与实际移动平均差值的多种相应组合),该些变动值将会被储存于该缓存器1103中,因此,当每一次该光学导航引擎的执行完成时(亦即在该图帧的结束之前且该光学导航操作的结束时),对于该控制器105来说,该些实际变动值会是可用的(available)。对于位移/位置变动,在位移/位置变动信号在线所显示的该些脉冲信号则用来指示出该缓存器1103中所储存的该位移数据(亦即多个变动值)是在与该些脉冲信号有关的时序时变成是可用的,然而,这并非是本技术的限制。再者,在图2的例子中,该处理电路1102也可以决定不降低该可变帧率,并且基于所捕捉的多个图帧来产生实际位移数据的一频率则符合该最低轮询频率的要求。
37.在另一实施例,为了节省该光学导航装置100的更多电池电源,该处理电路1102可以降低该可变帧率至一较低的帧率以等效地降低该发光单元115的该闪光频率以及另外产生或计算该预测的位移数据(亦即多个预测的变动值)来更新从该较低的闪光频率所捕捉的图像所产生出的实际位移数据的信息/数值,该处理电路1102能够控制该特定闪光频率使其符合或是低于该传输接口的该特定轮询频率(亦即,在该高速追踪模式或该节能模式中任一模式的该轮询频率或最低轮询频率)。
38.实作上,为了动态地决定该较低可变帧率的数值,该光学导航装置100(或该处理电路1102)用来基于目前所使用的帧率(亦即该先前所调整的帧率)来侦测或预测光学导航装置100在该工作表面上的移动速度,以便决定该可变帧率的实际数值,该所决定的可变帧率的实际数值足够用来有效追踪该光学导航装置100的移动以及有效节省该光学导航装置100较多电源。举例来说,下表显示了根据本技术实施例该光学导航装置100操作在不同例子中其电流消耗、帧率及移动速度之间的关系:
[0039][0040]
如上所示,该光学导航装置100的移动速度或平均移动速度的变动例如可以是从每秒1英吋到每秒30英吋的范围,然而,这并非是本技术的限制。而因应于不同的移动速度,为了能够仍然有效地追踪该光学导航装置100的移动,该光学导航装置100能够根据不同的帧率来执行操作,而该不同的帧率的变动可以是从每秒600张图帧至每秒2千张的范围,然而,这并非是本技术的限制。也就是说,因应于不同的移动速度,该光学导航装置100(或该处理电路1102)能够控制/调整该可变帧率,令该可变帧率变得较低,例如较低于该最低轮询频率1khz的帧率。举例来说,当该移动速度变得较小时(例如是每秒1英吋、每秒5英吋或每秒10英吋时),该处理电路1102可以调整其可变帧率,使其调整至每秒600张图帧或每秒800张图帧。此外,该光学导航装置100的电池的电流消耗则几乎是由该发光频率所决定(dominated)并且其几乎也是正比于该发光频率,而该发光频率则正比于该可变帧率。如此一来,在能够仍然有效追踪该光学导航装置100的移动的条件下,基于不同的情况来动态地调整该可变帧率为不同的且较低的频率就可以有效地减少其电流消耗并节省其电池更多的电源。例如,相较于传统的技术,该光学导航装置100的电流消耗可以降低至0.611毫安或0.443毫安,明显低于传统技术将帧率维持在最低为每秒1千张的频率所相应的电流消耗0.785毫安。
[0041]
图3是根据本技术一实施例该光学导航装置100操作于一高速追踪模式的另一范例示意图。在这个例子中,该光学导航装置100能够用来控制该光学传感器装置110以一可调整/可变帧率来进行操作以捕捉一或多个图像来产生实际位移数据并接着基于该实际位移数据来预测另一位移数据以便产生足够的位移数据给该控制器105。举例来说(但不限定),当该通用串行总线传输接口的该轮询频率是协议保持相应于每秒1.2千张图帧时,该可变帧率可以调整为每秒600张图帧,也就是说,该可变帧率的频率可以被调整为所协议的轮询频率的一半。在其他例子中,该可变帧率也可以调整为每秒500张图帧,也就是该最低轮询频率1khz的一半的频率。
[0042]
如图3中所示,举例来说,当该光学导航装置100于该工作表面上缓慢移动时,例如其可侦测到其移动速度为每秒1英吋时(但不限定),该可变帧率可被降低并调整为一个较低的帧率,例如,当该光学导航装置100以每秒1英吋的移动速度进行移动时,能够有效用来
追踪该光学导航装置100的移动的一帧率会是每秒600张图帧。在相应于每秒600张图帧的一或每一图帧的起始时,该处理电路1102会提供电流脉冲来控制该发光单元115以令该传感器单元1101捕捉/获取一图帧/图像,以及接着进行数字信号处理及光学导航引擎的操作来计算该些实际变动值。而在一或每一图帧的光学导航引擎的执行结束时,该处理电路1102会产生一组实际变动值至该缓存器1103,以更新该缓存器1103中所储存的位移数据的信息/一或多个数值,因此,该些变动值的数据在该光学导航引擎的执行结束时会变成是可用的。而在该光学导航引擎的执行结束时与一或每一图帧的结束之间的一期间,该处理电路1102会预测并产生一组预测的/预估的变动值至该缓存器1103以更新该缓存器1103中所储存的位移数据的信息/一或多个数值,因此,对于该控制器105的数据读取来说,在这个时间点上该些预估的变动值的数据也会变成是可用的。等效上,在这个例子中,该处理电路1102用来于该光学传感器装置110所捕捉的多个图像帧所产生的连续的任两组实际变动值/位移值之间插入一组预估的变动值/位移值。再者,应注意,位移变动的信号在线所显示的多个脉冲信号是用来表示出该缓存器1103中所储存的位移数据是与在图3上所示的该些脉冲信号有关的时序时变成是可用的。在这个例子中,产生该些实际变动值再加上产生该些预测的变动值的一频率在平均来说会等于1.2khz,其至少会较高于该最低轮询频率1khz,或是符合所协议的轮询频率1.2khz。然而,这并非是本技术的限制。
[0043]
再者,在另一实施例,该可变帧率可以被调整为另一不同的帧率mn
×
pr,其中m的值是小于整数n的一正整数,而pr表示的是该通用串行总线传输接口中所定义的协议后的轮询频率(或最低轮询频率)。举例来说,在侦测到该移动速度之后,该光学导航装置100(或处理电路1102)可基于所侦测到的移动速度来决定将m的值设定为1而n的值设定为4以减少电源消耗以及仍然能够有效地追踪该光学导航装置100的移动,因此在这个例子中如果该协议的轮询频率pr等于1.2khz,则该可变帧率会等于0.25
×
pr=300fps。因此,在每一图帧中,该光学传感器装置110用来预测并产生更多预估的变动数据,在这个例子中,对于每一图帧,该光学传感器装置110会产生3组预测的变动值(但不限定),该3组预测的变动值会依序跟随于一组实际变动值之后,以令该缓存器1103中所储存的位移数据的信息可以根据平均来说1.2khz的频率来被更新而可用;如图4所示。等效上,在本实施例中,该处理电路1102用来插入3组预测的变动/位移值于该光学传感器装置110所捕捉的该些图像帧所产生的连续的任两组实际变动/位移值之间。
[0044]
在另一实施例,为了令该缓存器1103中所储存的该合成的变动数据至少是根据最低限度所要求的轮询频率(例如1khz)来被更新而变成可用的,该光学传感器装置110可对于在不同时序点的不同图帧来预测并产生该些变动值至该缓存器1103。请参照图5及图6,图5是根据本技术一实施例对于多个不同的图帧(例如任两个连续的图帧,但不限定)该光学导航装置100进行a1次及a2次的预测、产生变动值的操作的范例示意图,图6是根据本技术一实施例对于多个不同的图帧该光学导航装置100进行a1次、a2次、a3次及a4次的预测、产生变动值的操作的范例示意图。
[0045]
如图5所示,举例来说,该处理电路1102可以在一第一图帧f1的起始与结束之间的一时间期间进行a1次的预测并产生多个变动值,也可以在一第二图帧f2的起始与结束之间的一时间期间进行a2次的预测并产生多个变动值,整数a1与a2的值并不相同,且在本例子中该第二图帧f2是在第一图帧f1之后,而在另一例子中,该第二图帧f2是在第一图帧f1之
后并且直接跟随于第一图帧f1之后。如图5所示,对于任两个连续的图帧,该光学传感器装置110可以用来分别进行a1次及a2次的预测并产生多个变动值。应注意的是,该处理电路1102用来在一图帧的光学导航引擎的执行的结束与该图帧的结束之间的一时间长度期间内周期性地进行a1次或a2次的产生多个预测的变动值的操作,举例来说,在一实施例,a1组的预测的变动值可以平均地或非平均地散布在一图帧f1的光学导航引擎的执行的结束与该图帧f1的结束之间的一时间长度期间内,而a2组的预测的变动值可以平均地或非平均地散布在一图帧f2的光学导航引擎的执行的结束与该图帧f2的结束之间的一时间长度期间内。
[0046]
如图6所示,举例来说,该处理电路1102可以在一第一图帧f1的起始与结束之间的一时间期间进行a1次的预测并产生多个变动值、在一第二图帧f2的起始与结束之间的一时间期间进行a2次的预测并产生多个变动值、在一第三图帧f3的起始与结束之间的一时间期间进行a3次的预测并产生多个变动值以及在一第四图帧f4的起始与结束之间的一时间期间进行a4次的预测并产生多个变动值等等,整数a1、a2、a3及a4的值可以是不相同、部分不相同或是均相同,这并非是本技术的限制。对于每一图帧,具有不同个数的多组预测的变动值可以平均地或非平均地分散于该每一图帧的光学导航引擎的执行的结束与该每一图帧的结束之间的一时间长度期间内。应注意,a1、a2、a3及a4之中的任一整数以及其后续的整数也可以设定为零,也就是说,该处理电路1102对于一图帧中可以插入较多组预测的变动值,而对于另一不同的图帧中可以不插入预测的变动值。换言之,在某些情况中,与两张图帧有关的两组实际变动值之间可以是没有产生、插入预测的变动值的,亦即没有预测的位移数据。再者,产生该些实际变动值再加上产生该些预测的变动值的一频率等效上平均来说是等于(或符合)或是较高于该最低轮询频率的一频率,因此使得能够有效地并精确地追踪该光学导航装置100的移动以及大幅减轻其电池的电流消耗,如此一来,无论是该高速追踪模式或该节能模式中,当该光学导航装置100移动较慢时,均能够节省较多的电力。
[0047]
再者,也可以基于先前所预估的位移数据、实际位移数据(从一或多个所捕捉的图像所产生的)的一部分及/或先前所调整过的该可变帧率,或是基于上述三者的任一组合,通过预测该光学导航装置100的移动速度来内插或外插出预测的变动/位移数据以执行产生该预测的变动/位移数据的操作。再者,在其他实施例,也可以基于在先前一或多个图帧中所侦测到的移动及/或先前所调整过的可变帧率,通过预测该光学导航装置100的移动速度来内插或外插出预测的位移数据以执行产生该预测的变动/位移数据的操作,而该所侦测到的移动亦即是该光学传感器装置110所捕捉的多个图像帧所相应的实际位移数据的一部分。再者,该光学传感器装置110也可以用来根据至少两组在x轴与y轴的实际变动值的多个差值或其多个平均值来产生一组在x轴与y轴的预测的变动值。
[0048]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1