基于传感器阵列的动作捕捉装置及其姿态识别方法
1.本发明属于动作捕捉技术领域,具体涉及基于传感器阵列的动作捕捉装置及其姿态识别方法。
背景技术:
2.当前市面上,在进行动作捕捉时,常用的是穿戴式多单点多轴传感器耦合的动作姿态捕捉系统,这些动作捕捉系统,由于需要多个传感器的参数耦合,容易导致传感器的误差相对较大,而且由于九轴传感器的磁力计的存在,容易受到地球磁场的影响;目前九轴传感器中的磁力计与加速度计和陀螺仪的耦合还处在相对起步阶段,耦合的参数并不理想,磁力计的参数容易漂移,且与选择的位置以及不同的室内环境都有关系;目前的磁力计无法承受高速的平移运动,若是进行快速运动,传感器的漂移误差会更大,影响传感器的正常使用。
3.目前市面上使用的穿戴式传感器。由于全身需要佩戴超过15个传感器以上,而且如果出现传感器丢失,即使是只有1个传感器的丢失,都会导致整个动作捕捉系统的功能的丧失。不利于日常的使用以及快速运动的动作捕捉。
技术实现要素:
4.鉴于现有技术存在的问题,本发明的目的在于提供基于传感器阵列的动作捕捉装置及其姿态识别方法,使用阵列式薄膜压力传感器分布而成的类衣式动作捕捉装置,在使用穿戴过程中,由于运动而产生的拉力、剪力等参数的通信,使用神经网络训练,能自发的耦合出一个较好的运行结果;不仅弥补了使用中可能由于地磁场的不稳定以及耦合的不好导致的动作漂移,也能够解决由于使用中传感器缺失而导致的装置瘫痪,不能使用的问题。
5.本发明提出了一种基于压力传感器阵列的动作捕捉装置,包括弹性衣服、一组薄膜压力传感器、参数汇总发送机构及地面基站,所述弹性衣服的手臂关节处的径向与环向均匀排布薄膜压力传感器,所述参数汇总发送机构设置于弹性衣服的中心处,所述薄膜压力传感器与参数汇总发送机构电性连接,所述参数汇总发送机构与地面基站无线通讯,所述薄膜压力传感器之间通过细线连接,所述参数汇总发送机构与弹性衣服通过细线绑扎固定。
6.进一步地,所述薄膜压力传感器包括薄膜压力传感器主体和薄膜压力传感器底座,所述薄膜压力传感器主体设置于薄膜压力传感器底座上,所述薄膜压力传感器主体上设有电源供电正极端口与电源供电负极端口。
7.进一步地,所述薄膜压力传感器底座的一侧设有传感器底座供电正极端口、传感器底座供电负极端口、传感器底座高低压电平信号端口及传感器底座模拟电压信号输出端口。
8.进一步地,所述参数汇总发送机构包括stm32开发板和设置于stm32开发板中心处的nfr无线单元,所述stm32开发板的表面左侧上部自左向右依次设有a5端口、a7端口、b6端
口及a6端口;所述stm32开发板的表面左侧下部自左向右依次设有开发板电源输入正极端口、开发板电源输入负极端口、开发板高低压电平信号端口及开发板模拟电压信号输入端口,所述stm32开发板的表面右侧设有开发板电源正极输出端口和开发板电源负极输出口。
9.进一步地,所述nfr无线单元的一侧部自上至下依次设有电源正极端口、电源负极端口、时钟线端口、spi主机数据输出线端口、spi从机数据接收线端口及中断请求线端口。
10.进一步地,所述电源正极端口与开发板电源正极输出端口电性连接,电源负极端口与开发板电源负极输出口电性连接,时钟线端口与a5端口电性连接,spi主机数据输出线端口与a7端口电性连接,spi从机数据接收线端口与b6端口电性连接,中断请求线端口与a6端口电性连接。
11.进一步地,所述开发板高低压电平信号端口与传感器底座高低压电平信号端口电性连接;所述开发板模拟电压信号输入端口与传感器底座模拟电压信号输出端口电性连接。
12.进一步地,所述stm32开发板与nfr无线单元通过spi通讯,所述nfr无线单元与地面基站通过无线通讯。
13.本发明的还提出了基于传感器阵列的动作捕捉装置的姿态识别方法,包括具体如下步骤:1)首先安装本发明的装置,连接完成各电路;2)待1)步骤中的装置安装完后,将装置上的薄膜压力传感器进行初始化,得到初始压力,并标记此时的压力为v0,此时让实验者穿戴该装置备用;3)待2)步骤中准备工作完成后,实验者进行手臂关节处不同的动作,当实验者进行第一个动作,各个薄膜压力传感器的电压值v
11
、v
21
、v
31
……
由参数汇总发送机构发送到地面基站,地面基站将各个参数导入神经网络中,标记为结果1;然后让实验者进行第二个动作,各个薄膜压力传感器的电压值v
12
、v
22
、v
32
……
由参数汇总发送机构发送到地面基站,地面基站将各个参数导入神经网络中,标记为结果2;然后让实验者进行动作第三个动作
……
,标记为结构3,直至进行多组动作,得到神经网络数据群;通过电压流群参数与动作对应关系的神经网络数据库,建立神经网络算法库;4)待3)步骤的神经网络算法库建立完成后,不同动作而产生的接受到的由薄膜压力传感器传感器产生的压力流数据,便可以库进行自动拟合成动作显示在地面站。
14.本发明的有益效果:1)采用本发明的技术方案,使用阵列式薄膜压力传感器分布而成的类衣式动作捕捉装置,在使用穿戴过程中,由于运动而产生的电压流群参数,使用神经网络训练,能自动拟合成动作显示在地面基站;2)本发明使用的压力薄膜传感器,避开了使用九州惯性传感器中的磁力计引发的地磁场影响;3)本发明使用薄膜压力传感器阵列配合神经网络训练,即便在使用过程中传感器单个或者多个缺失,也不会而导致动作捕捉装置失去作用。
附图说明
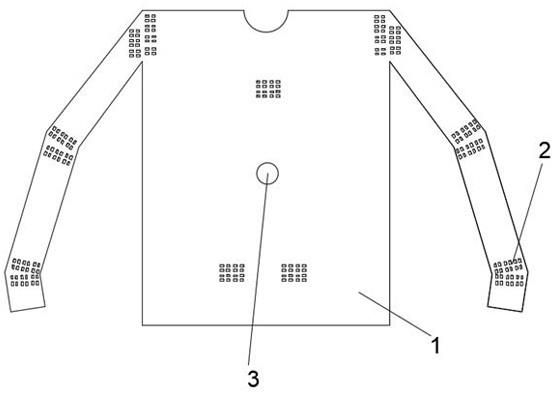
15.图1为本发明的装置的整体结构示意图;
图2为本发明单个传感器的结构示意图;图3为本发明参数汇总发送机构的结构示意图;图4为本发明实施例的初始传感器阵列示意图;图5为本发明实施例1中小臂向上抬起示意图;图6为实施例1小臂向上抬起时薄膜传感器伸张阵列示意图;图7为实施例1小臂向上抬起时薄膜传感器收缩阵列示意图;图8为本发明实施例2中小臂进行向内侧旋转运动示意图;图9为实施例2的小臂进行向内侧旋转时薄膜传感器旋转阵列示意图。
16.图中:1
‑
弹性衣服;2
‑
薄膜压力传感器;3
‑
参数汇总发送机构;31
‑
stm32开发板;311
‑
a5端口;312
‑
a7端口;313
‑
b6端口;314
‑
a6端口;315
‑
开发板电源输入正极端口;316
‑
开发板电源输入负极端口;317
‑
开发板高低压电平信号端口;318
‑
开发板模拟电压信号输入端口;319
‑
开发板电源正极输出端口;3110
‑
开发板电源负极输出口;32
‑
nfr无线单元;321
‑
电源正极端口;322
‑
电源负极端口;323
‑
时钟线端口;324
‑
spi主机数据输出线端口;325
‑
spi从机数据接收线端口;326
‑
中断请求线端口;4
‑
薄膜压力传感器主体;41
‑
电源供电正极端口;42
‑
电源供电负极端口;5
‑
薄膜压力传感器底座;51
‑
传感器底座供电正极端口;52
‑
传感器底座供电负极端口;53
‑
传感器底座高低压电平信号端口;54
‑
传感器底座模拟电压信号输出端口;6
‑
第一薄膜传感器;7
‑
第二薄膜传感器;8
‑
第三薄膜传感器;9
‑
第四薄膜传感器;10
‑
第五薄膜传感器;11
‑
第六薄膜传感器。
具体实施方式
17.下面结合附图对本发明作进一步的说明,但本发明所保护的范围不限于所述范围。
18.如图1
‑
3所示,基于传感器阵列的动作捕捉装置,包括弹性衣服1、一组薄膜压力传感器、参数汇总发送机构3及地面基站,弹性衣服1的手臂关节处的径向与环向均匀排布薄膜压力传感器2,参数汇总发送机构3设置于弹性衣服1的中心处,薄膜压力传感器2包括薄膜压力传感器主体4和薄膜压力传感器底座5,薄膜压力传感器主体4设置于薄膜压力传感器底座5上,薄膜压力传感器主体4上设有电源供电正极端口41与电源供电负极端口42。
19.本发明的基于传感器阵列的动作捕捉装置,薄膜压力传感器底座5的一侧设有传感器底座供电正极端口51、传感器底座供电负极端口52、传感器底座高低压电平信号端口53及传感器底座模拟电压信号输出端口54。
20.本发明的基于传感器阵列的动作捕捉装置,参数汇总发送机构3包括stm32开发板31和设置于stm32开发板31中心处的nfr无线单元32, stm32开发板31的表面左侧上部自左向右依次设有a5端口311、a7端口312、b6端口313及a6端口314; stm32开发板31的表面左侧下部自左向右依次设有开发板电源输入正极端口315、开发板电源输入负极端口316、开发板高低压电平信号端口317及开发板模拟电压信号输入端口318, stm32开发板31的表面右侧设有开发板电源正极输出端口319和开发板电源负极输出口3110。
21.本发明的基于传感器阵列的动作捕捉装置,nfr无线单元32的一侧部自上至下依次设有电源正极端口321、电源负极端口322、时钟线端口323、spi主机数据输出线端口324、spi从机数据接收线端口325及中断请求线端326。
22.电源正极端口321与开发板电源正极输出端口319电性连接,电源负极端口322与开发板电源负极输出口3110电性连接,时钟线端口323与a5端口311电性连接,spi主机数据输出线端口324与a7端口312电性连接,spi从机数据接收线端口325与b6端口313电性连接,中断请求线端口326与a6端口314电性连接。
23.开发板高低压电平信号端口317与传感器底座高低压电平信号端口53电性连接;开发板模拟电压信号输入端口318与传感器底座模拟电压信号输出端口54电性连接。
24.stm32开发板31与nfr无线单元32通过spi通讯, nfr无线单元32与地面基站通过无线通讯。
25.本发明还提出了基于传感器阵列的动作捕捉装置的姿态识别方法,包括具体如下步骤:1)首先安装本发明的装置,连接完成各电路;2)待1)步骤中的装置安装完后,将装置上的薄膜压力传感器2进行初始化,得到初始压力,并标记此时的压力为v0,此时让实验者穿戴该装置备用;3)待2)步骤中准备工作完成后,实验者进行手臂关节处不同的动作,当实验者进行第一个动作1,各个薄膜压力传感器的电压值v
11
、v
21
、v
31
……
由参数汇总发送机构(3)发送到地面基站,地面基站将各个参数导入神经网络中,标记为结果1;然后让实验者进行第二个动作,各个薄膜压力传感器的电压值v
12
、v
22
、v
32
……
由参数汇总发送机构3发送到地面基站,地面基站将各个参数导入神经网络中,标记为结果2;然后让实验者进行动作3
……
,标记为结构3,直至进行多组动作,得到神经网络数据群;通过电压流群参数与动作对应关系的神经网络数据库,建立神经网络算法库;4)待3)步骤的神经网络算法库建立完成后,不同动作而产生的接受到的由薄膜压力传感器传感器产生的压力流数据,便可以库进行自动拟合成动作显示在地面站。
26.实施例1小臂进行向上抬起运动如图4
‑
7所示,薄膜传感器阵列由第一薄膜传感器6、第二薄膜传感器7、第三薄膜传感器8、第四薄膜传感器9、第五薄膜传感器10、第六薄膜传感器11组成形成为一个阵列,使用者的小臂向上抬起时,小臂上方穿戴的衣服中的传感器阵列由于手臂的运动,会产生受迫挤压,即产生收缩,第一薄膜传感器6和第二薄膜传感器7会发生向下挤压运动,导致第三薄膜传感器8和第四薄膜传感器9发生收缩,此时第三薄膜传感器8和第四薄膜传感器9会产生一个位移
∆
a,同时产生一个电压阵列群发送到参数汇总发送机构3,于此同时小臂下方穿戴的衣服中的传感器阵列由于手臂的运动,会产生受迫伸张,即产生拉伸,此时第一薄膜传感器6和第二薄膜传感器7会发生向下挤压运动,导致第三薄膜传感器8和第四薄膜传感器9发生收缩,此时第三薄膜传感器8和第四薄膜传感器9会产生一个位移
∆
b,同时也产生一个电压阵列群发送到参数汇总发送装置;这时参数汇总发送装置会用无线通讯与后台地面站软件发生通信,而产生的参数会通过通讯装置发送到软件后台的神经网络单元;通过神经网络的训练和几次模拟输出最终稳定结果能得到结果为手臂为向上抬状态。
27.实施例2小臂进行向内侧旋转运动如图8
‑
9所示,此时使用者的小臂单独旋转时,小臂上方穿戴的衣服中的传感器阵
列由于手臂的运动,会产生受迫运动,即产生旋转,此时第一薄膜传感器6和第二薄膜传感器7会发生向左边挤压运动,导致第三薄膜传感器8和第四薄膜传感器9发生收缩,此时第一薄膜传感器6和第二薄膜传感器7会产生一个位移
∆
c,同时第三薄膜传感器8和第四薄膜传感器9产生另一个扭曲的位移
∆
d;此时第一薄膜传感器6和第二薄膜传感器7会产生个为正值的拉力δc,第三薄膜传感器8和第四薄膜传感器9会产生一个剪力ε;导致传感器群又会输出一组电流阵列;与此同时后台软件发生通信,而产生的参数会通过通讯装置发送到软件后台的神经网络单元;通过神经网络训练自动拟合,得到此时手臂正在进行向内测旋转运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1