不平衡样本多任务自优化的滚动轴承故障迁移诊断方法
1.本发明属于滚动轴承故障诊断技术领域,具体涉及一种不平衡样本多任务自优化的滚动轴承故障迁移诊断方法。
背景技术:
2.滚动轴承以其效率高、摩擦小、装配方便等优点,在各类旋转机械装备中得到了广泛应用,然而滚动轴承在高转速、大负荷的恶劣条件下工作时,易发生故障,影响机械装备的整体性能,造成严重的经济损失甚至灾难性事故,因此亟需研究滚动轴承故障诊断技术。智能故障诊断依靠先进的机器学习方法,能够实现滚动轴承健康状态的自动高效识别,已成为保障滚动轴承安全平稳运行的重要手段。然而工程实际中获取的数据往往是大量健康状态未知的样本,这些健康状态未知的样本无法有效地训练诊断模型,限制了智能故障诊断的工程应用。迁移学习可从源滚动轴承故障信息中提取知识经验,并将其应用于目标滚动轴承的故障诊断中,弱化了诊断模型对充足健康状态已知的工程数据的依赖。
3.工程实际中,目标滚动轴承在全寿命服役周期内长时间工作于正常状态,获取的故障状态监测数据远远少于正常状态监测数据,这将造成目标滚动轴承监测数据严重不平衡。现有的大多数滚动轴承故障迁移诊断技术将各类健康状态样本同等看待,并以提高整体的分类准确率作为目标,然而在严重不平衡的目标滚动轴承监测数据下,多数类健康状态样本将主导诊断模型的分类准确率,使得模型难以从少数类健康状态的样本中充分学习诊断知识,导致多数类健康状态样本的诊断精度高而少数类健康状态样本的诊断精度很低,难以在实际应用中实现对滚动轴承故障的有效准确识别。
技术实现要素:
4.为了克服上述现有技术存在的缺陷,本发明的目的在于提出一种不平衡样本多任务自优化的滚动轴承故障迁移诊断方法,提高监测数据不平衡下的滚动轴承故障迁移诊断精度,推动智能故障诊断技术的实际应用。
5.为达到上述目的,本发明采取的技术方案为:
6.不平衡样本多任务自优化的滚动轴承故障迁移诊断方法,包括以下步骤:
7.步骤1:获取源滚动轴承r种健康状态时的振动信号样本集其中,为第m个源滚动轴承的振动信号样本,由n个振动数据点组成,其样本标签为m
s
为源滚动轴承振动信号样本总数,上标/下标s表示源滚动轴承;获取目标滚动轴承的振动信号样本集其中,健康状态已知的目标滚动轴承振动信号样本集为健康状态未知的目标滚动轴承振动信号样本集为健康状态未知的目标滚动轴承振动信号样本集为为
第n个目标滚动轴承的振动信号样本,为第u个健康状态已知的目标滚动轴承振动信号样本,其样本标签为动信号样本,其样本标签为为第v个健康状态未知的目标滚动轴承振动信号样本,每个样本由n个振动数据点组成,m
t
为目标滚动轴承振动信号样本总数,u
t
为健康状态已知的目标滚动轴承振动信号样本总数,v
t
为健康状态未知的目标滚动轴承振动信号样本总数,且存在关系m
t
=u
t
+v
t
,上标/下标t代表目标滚动轴承;
8.步骤2:构建深度稠密卷积神经网络,作为基础分类器,利用源滚动轴承振动信号样本集对基础分类器进行预训练,待训练参数为特征提取模块参数φ和健康状态识别模块参数训练过程即最小化如下目标函数,并对基础分类器的待训练参数φ,进行更新:
[0009][0010]
式中,为样本被预测为第r种健康状态的概率;i(
·
)为指示函数;
[0011]
步骤3:应用步骤2中完成预训练的特征提取模块参数φ结合全新随机初始化的重构健康状态识别模块参数构建多任务学习器f
meta
;
[0012]
步骤4:从健康状态已知的目标滚动轴承振动信号样本集中随机挑选出样本数据组成更新数据集用更新数据集中的样本组成不同的学习任务组合t,从任务组合t中选取j个组成梯度更新任务组合每个任务t
i
由支持集和查询集组成,其中为任务t
i
下第p个支持集样本,其样本标签为p为任务t
i
下的支持集样本总数,为任务t
i
下第q个查询集样本,其样本标签为q为任务t
i
下的查询集样本总数;
[0013]
步骤5:利用步骤4构造的梯度更新任务组合中每个任务t
i
的支持集样本一次训练更新多任务学习器f
meta
的参数,分别得到每个任务t
i
下多任务学习器f
meta
的一次更新参数:
[0014][0015]
式中,为任务t
i
的支持集下的损失函数;
φ
i
',分别为在每个任务t
i
的支持集下一次更新后的特征提取模块参数和健康状态识别模块参数;β为一次更新的学习率;
[0016]
步骤6:分别计算每个任务t
i
的查询集在相应一次更新参数后模型的损失函数并求和,得到多任务学习器目标函数l
meta
:
[0017][0018]
利用得到的多任务学习器目标函数l
meta
二次更新多任务学习器f
meta
的参数,得到多任务学习器f
meta
更新的健康状态识别模块参数:
[0019][0020]
式中,为更新的健康状态识别模块参数;γ为二次更新的学习率;
[0021]
步骤7:利用健康状态已知的目标滚动轴承振动信号样本集中未输入多任务学习器f
meta
的数据组成微调数据集用微调数据集中的样本对多任务学习器的参数进行微调:
[0022][0023]
式中,为微调数据集下的损失函数;λ为微调模型时的学习率;φ
final
、为最终滚动轴承故障迁移诊断模型的特征提取模块参数和健康状态识别模块参数;
[0024]
步骤8:将第v个健康状态未知的目标滚动轴承振动信号样本输入训练好的最终滚动轴承故障迁移诊断模型中,取输出的目标滚动轴承振动样本健康状态概率分布中最大概率值所对应的健康标记作为第v个健康状态未知的目标滚动轴承振动信号样本的健康状态。
[0025]
本发明的有益效果为:本发明提出了一种监测数据不平衡下多任务自优化的滚动轴承故障迁移诊断方法,该方法克服了实际应用中监测数据不平衡因素对现有滚动轴承故障迁移诊断技术的限制,提高了监测数据不平衡约束下滚动轴承故障的迁移诊断精度和性能。
附图说明
[0026]
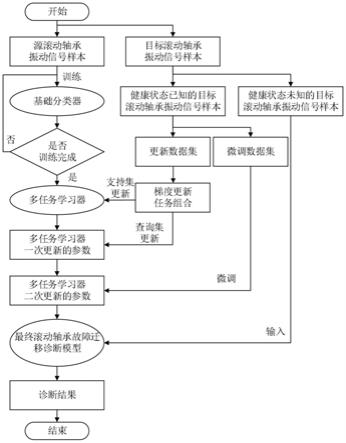
图1为本发明的流程图。
[0027]
图2为本发明基础分类器的结构示意图。
[0028]
图3为本发明多任务学习器的参数更新过程示意图。
具体实施方式
[0029]
下面结合附图和实施例对本发明进一步详细描述。
[0030]
如图1所示,不平衡样本多任务自优化的滚动轴承故障迁移诊断方法,包括以下步骤:
[0031]
步骤1:获取源滚动轴承r种健康状态时的振动信号样本集其中,为第m个源滚动轴承的振动信号样本,由n个振动数据点组成,其样本标签为m
s
为源滚动轴承振动信号样本总数,上标/下标s表示源滚动轴承;获取目标滚动轴承的振动信号样本集其中,健康状态已知的目标滚动轴承振动信号样本集为健康状态未知的目标滚动轴承振动信号样本集为健康状态未知的目标滚动轴承振动信号样本集为为第n个目标滚动轴承的振动信号样本,为第u个健康状态已知的目标滚动轴承振动信号样本,其样本标签为动信号样本,其样本标签为为第v个健康状态未知的目标滚动轴承振动信号样本,每个样本由n个振动数据点组成,m
t
为目标滚动轴承振动信号样本总数,u
t
为健康状态已知的目标滚动轴承振动信号样本总数,v
t
为健康状态未知的目标滚动轴承振动信号样本总数,且存在关系m
t
=u
t
+v
t
,上标/下标t代表目标滚动轴承;
[0032]
步骤2:参照图2,构建深度稠密卷积神经网络,作为基础分类器,利用源滚动轴承振动信号样本集对基础分类器进行预训练,待训练参数为特征提取模块参数φ和健康状态识别模块参数训练过程即最小化如下目标函数,并对基础分类器的待训练参数φ,进行更新:
[0033][0034]
式中,为样本被预测为第r种健康状态的概率;i(
·
)为指示函数;
[0035]
步骤3:应用步骤2中完成预训练的特征提取模块参数φ结合全新随机初始化的重构健康状态识别模块参数构建多任务学习器f
meta
;
[0036]
步骤4:从健康状态已知的目标滚动轴承振动信号样本集中随机挑选出样本数据组成更新数据集用更新数据集中的样本组成不同的学习任务组合t,从任务组合t中选取j个组成梯度更新任务组合每个任务t
i
由支持集和查询集组成,其中为任务t
i
下第
p个支持集样本,其样本标签为p为任务t
i
下的支持集样本总数,为任务t
i
下第q个查询集样本,其样本标签为q为任务t
i
下的查询集样本总数;
[0037]
步骤5:参照图3,利用步骤4构造的梯度更新任务组合中每个任务t
i
的支持集样本一次训练更新多任务学习器f
meta
的参数,分别得到每个任务t
i
下多任务学习器f
meta
的一次更新参数:
[0038][0039]
式中,为任务t
i
的支持集下的损失函数;φ
i
',分别为在每个任务t
i
的支持集下一次更新后的特征提取模块参数和健康状态识别模块参数;β为一次更新的学习率;
[0040]
步骤6:参照图3,分别计算每个任务t
i
的查询集在相应一次更新参数后模型的损失函数并求和,得到多任务学习器目标函数l
meta
:
[0041][0042]
利用得到的多任务学习器目标函数l
meta
二次更新多任务学习器f
meta
的参数,得到多任务学习器f
meta
更新的健康状态识别模块参数:
[0043][0044]
式中,为更新的健康状态识别模块参数;γ为二次更新的学习率;
[0045]
步骤7:利用健康状态已知的目标滚动轴承振动信号样本集中未输入多任务学习器f
meta
的数据组成微调数据集用微调数据集中的样本对多任务学习器的参数进行微调:
[0046][0047]
式中,为微调数据集下的损失函数;λ为微调模型时的学习率;φ
final
、为最终滚动轴承故障迁移诊断模型的特征提取模块参数和健康状态识别模块参数;
[0048]
步骤8:将第v个健康状态未知的目标滚动轴承振动信号样本输入训练好的最终
滚动轴承故障迁移诊断模型中,取输出的目标滚动轴承振动样本健康状态概率分布中最大概率值所对应的健康标记作为第v个健康状态未知的目标滚动轴承振动信号样本的健康状态。
[0049]
实施例:以机车轮对轴承的健康状态识别为例,验证本发明的可行性。
[0050]
获得的源滚动轴承振动信号样本集a来自美国凯斯西储大学,如表1所示,该样本集中包含4种轴承的健康状态:正常、内圈故障、外圈故障、滚动体故障。振动信号样本在4种不同的工况(1797r/min,0hp;1772r/min,1hp;1750r/min,2hp;1730r/min,3hp)下获取,每种健康状态加工3种故障程度(0.1778mm;0.3556mm;0.5334mm),振动信号的采样频率为12khz,每种健康状态的样本数为1200,每个样本中包含1200个采样点。
[0051]
获得的目标滚动轴承振动信号样本集b来自机车轮对轴承,如表1所示,该样本集中包含4种轴承的健康状态:正常、内圈故障、外圈故障、滚动体故障。该样本集又分为b1和b2两部分,b1的振动信号样本在转速350r/min~530r/min的工况下采集,b2的振动信号样本在转速490r/min~650r/min的工况下采集,采样频率为12.8khz,其中正常状态的样本数为1092,故障状态的样本数分别为440,每个样本中包含1200个采样点。
[0052]
表1源滚动轴承与目标滚动轴承的振动信号样本集
[0053][0054]
基于表1所示的振动信号样本集a、b,首先利用样本集a预训练基础分类器,其次从样本集b1中采样不同的任务组合训练多任务学习器,然后在样本集b2中选取每种健康状态5个样本微调诊断模型,最后应用样本集b2对诊断模型进行测试,验证本发明的可行性。考虑到目标滚动轴承振动信号样本集b中样本不平衡分布,除诊断精度外,选用f
‑
score与g
‑
mean两种不平衡分类评价指标量化本发明在迁移诊断任务上的效果。重复实验20次,计算诊断结果的统计值,如表2所示,本发明在目标机车轴承振动样本集上获得了84.47%的诊断精度,统计标准差为1.27%,此外,本发明获得的f
‑
score与g
‑
mean指标分别为0.843与0.885,指标接近于1,说明本发明方法的诊断准确性较高,验证了本发明方法在解决工程实际数据不平衡下的滚动轴承故障诊断问题中的可行性。
[0055]
表2不同方法的诊断效果对比
[0056][0057]
选择多层感知机作为分类器构成方法1,并与本发明方法的诊断效果进行对比。使用数据集b1的不平衡数据训练分类器,识别数据集b2中样本的健康状态。如表2所示,该方法的诊断精度为57.06%,f
‑
score为0.542,g
‑
mean为0.625,均低于本发明方法。
[0058]
选择与提出方法基础分类器相同结构的模型作为分类器构成方法2,并与本发明方法的诊断效果进行对比。使用数据集b1中的不平衡数据训练分类器,识别数据集b2中样本的健康状态。如表2所示,该方法的诊断精度为74.37%,f
‑
score为0.759,g
‑
mean为0.869,均低于本发明方法,且标准差较高,为5.91%。
[0059]
通过对比本发明方法与方法1和方法2的诊断效果,表明本发明方法有效地克服监测数据不平衡因素对诊断知识迁移的影响,有效提高了故障迁移诊断模型的精度和性能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1