基于北斗时空数据重构与数据挖掘的运载工具监管分析方法与流程
1.本发明涉及北斗定位技术,是一种基于北斗时空数据重构与数据挖掘的运载工具监管分析方法。
背景技术:
2.北斗定位技术是一种中国独立开发的全球卫星定位系统,其工作原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据来知道接收机的具体位置。由于北斗终端每天产生大量数据,因此需要对数据进行重构组织,才能更有效地对北斗对象(运载工具)进行研究,分析运载工具的规律。现有技术一般将多粒度的时空数据(北斗产生的数据包括经纬度、速度、转向、事件、短报文)进行转换,将其抽象为点线面等方式进行存储,有利于用户的操作,还能保证数据的准确性何冗余问题。如中国专利文献中披露的申请号201610630728.1,申请公布日2016.11.23,发明名称“基于交通定位数据的多粒度道路分流可视分析方法”;但上述专利和同类技术单纯的点线面抽象会由于北斗时空数据的缺失、漂移等问题使得抽象出来的点线面与路网数据发生偏移的现象,从而较难进行准确的定位,同时缺少轨迹预测并较难实时的监测与预警。
技术实现要素:
3.为克服上述不足,本发明的目的是向本领域提供一种基于北斗时空数据重构与数据挖掘的运载工具监管分析方法,使其主要解决现有同类技术中点线面抽象会由于北斗时空数据的缺少和漂移使得抽象出来的点线面与路网数据发生偏移的现象,从而较难进行准确的定位,缺少轨迹预测并较难实时的监测与预警的技术问题。其目的是通过如下技术方案实现的。
4.一种基于北斗时空数据重构与数据挖掘的运载工具监管分析方法,其特征在于该运载工具监管分析方法对北斗时空数据进行重构,结合路网信息对北斗时空数据进行抽象;接着,结合通信基站泰森多边形的范围对抽象后的数据进行联合泰森多边形和路网信息的空间语义表达,实现北斗时空数据的空间粒度的划分;然后,结合设定的时间粒度,记录北斗对象随着时间变化而发生的空间变化的集合,实现北斗多粒度时空数据模型的构建;在粒度时空数据模型的构建的基础上,结合时间因素,以
△
t为时间精度,基于泰森多边形的空间语义表达涵盖对象经过的路网,反映不同对象在邻近时间在相同地理位置重合程度,通过上述的方法快速提取具有一定“相似性”的对象,以此实现对象的类别划分;最后,对于具有一定相似性的对象,对对象的移动轨迹进行分析,通过对象的地理位置相似性将对象进行分类反映具有相同偏好的对象在地理位置的活动规律。
5.所述对象在地理位置的活动规律通过挖掘对象出行模式,并结合对象的逗留时间和对象平均速度来获取对象停留点,以此解决对象轨迹随机性问题,最后采用fp树挖掘对象的频繁模式,实现对象运动规律构建,以此实现轨迹预测并实现实时的监测与预警。
6.所述结合设定的时间粒度设定为一分钟,以
△
t为时间精度设定为十分钟。
7.该运载工具监管分析方法的具体步骤如下:
8.步骤一,北斗空间语义表达,实现空间粒度的划分;1、借助基站和路网信息,构建泰森多边形与路网的映射图,对路网进行路段的划分,形成路段序列的标定;2、基于路段序列信息,查找北斗轨迹点与路段序列垂直距离最短的路段即为对象经过的路段;3、实现空间语义表达,一旦确定对象所在的路段后,需要结合一连串数据进行对象空间语义的表达;4、设定标准的时间颗粒度,记录北斗对象随着时间变化,其路段变化的集合,实现北斗多粒度时空数据模型构建,公式如下:s(t)={(q1,t1),(q2,t2),...,(q
n
,t
n
)}(公式1),其中q
i
表示路段的序号,t
i
表示时间颗粒度;
9.步骤二,基于地理位置相似性,将对象进行分类,并求解对象的停留规律;1、为了简化对象运动规律分析的复杂性,采用地理轨迹相似度的方法对对象进行分类;2、结合对象的速度和停留时间,求出相似对象的停留点;3、结合fp树挖掘对象的活动规律,把相似对象的停留时间进行提取后,得到相似对象群的停留信息以及停留次数;并采用fp树挖掘频繁项集,基于频繁项集,获取对象的活动频繁模式;4、结合活动规律预测对象的轨迹或者轨迹异常分析,实现运载工具监管与分析;即以fp树挖掘的运动规律来监管对象的实时轨迹,如果对象的实时轨迹与相似对象群中的频繁模式重合度过低或者没有找到对应的频繁模式,则系统认为该对象的轨迹存在异常,即可自动发出报警。
10.所述步骤二中对象进行分类采用“时空切片”,也就是基于对象以
△
t为时间精度,找出对象在某一个时间精度范围内的地理位置相近性,以此反映具有相同偏好的“对象”在地理位置的活动规律;表示为:
[0011][0012]
该方法设置对象相似度s(u,v)的阈值为0.3,如果在一天相似度的计算大于0.3,那么将对象归为一类;降低系统对对象活动规律求解的复杂度,其中t
i
(u)是指对象u在
△
t为时间范围内发生的定位的时间戳,上面通过设定标准的时间颗粒度来进行标记,由于
△
t设定为十分钟,那么现在要计算15点01分到15点10分这个时间精度对象u和对象v的地理位置相近性,那么15点3分的时候对象u才开始运动,而对象v在15点1分已经开始运动了,虽然时间不同步,在15点1分和15点2分的时候,u和v的相似度为0,因为对象u没有数据;δ(q
i
(u),q
j
(v))表示地理位置的重合度,如果他们在某一个时间颗粒度下都在同一个路段,δ(q
i
(u),q
j
(v))就等于1,否则等于0。
[0013]
所述步骤二中对象的速度和停留时间进行对象停留点的提取,假设对象的轨迹公式表示为:tr
i
={(q1,q2,t1,t2),(q2,q3,t2,t3),...,(q
n
‑1,q
n
,t
n
‑1,t
n
)}(公式3);如果对象在同一个路段逗留的时间t
n
‑
t
n
‑1大于时间阈值t,那么说明对象存在q
n
与q
n
‑1之间逗留;下一步,计算对象的速度,也存在一种情况,对象以低速运动,围绕着一个地方徘徊,因此通过对象的速度进行对象停留点衡量,v
n
=(|q
n
‑1‑
q
n
|)/(t
n
‑
t
n
‑1),如果在一个
△
t平均速度低于2m/s,那么则认为对象在某一个地方徘徊,也默认对象时停留的。
[0014]
本发明的运载工具监管分析方法定位较为准确,并且通过对象的活动规律,挖掘对象出行模式,结合逗留点的逗留时间和停留速度,提高轨迹预测准确性并能够实现实时的监测与预警;其适合用于通过北斗时空数据进行定位,轨迹预测及实时监测与预警,及其同类方法的技术改进。
附图说明
[0015]
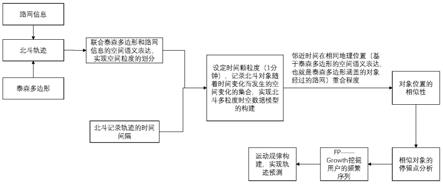
图1是本发明的工作原理流程方框图。
[0016]
图2是本发明的基于路段划分示意图。
[0017]
图3是本发明的基于垂直距离最短的路段确定示意图。
具体实施方式
[0018]
现结合附图,对本发明的具体实施步骤进行进一步的具体描述。该运载工具监管分析方法流程图,如图1所示。
[0019]
步骤一,北斗空间语义表达,实现空间粒度的划分。
[0020]
1、借助基站和路网信息,构建泰森多边形与路网的映射图,对路网进行路段的划分,形成路段序列的标定。如图2所示,基于路段划分示意图;图中展现了基于泰森多边形与路网进行相交的映射关系图层,基于上述两类图层对路网进行路段划分,每一个路段就是泰森多边形所涵盖的长度;基于每一个路段的划分,形成路段序列的标定。
[0021]
2、基于路段序列信息,查找北斗轨迹点与路段序列垂直距离最短的路段即为对象经过的路段。如图3所示,基于垂直距离最短的路段确定。
[0022]
3、实现空间语义表达,一旦确定对象所在的路段后,需要结合一连串数据进行对象空间语义的表达。由于北斗定位点会存在漂移的现象,因此,在空间语义确定的过程中,需要结合一系列轨迹点才能确定对象所在的路段,采用多个定位点对路段进行多重确认;除此以外,针对十字路口交叉点的范围,更是如此,因此对象经过十字路口时,会出现定位点所确定的路段发生漂移的现象。因此,在运动过程中,需要将多个点的数据进行判断,采用概率法;比如,采集100个点中,如果其中有70个点标定在001路段,其他30个点标定在008路段,那么取001路段作为对象在该时间粒度(100个点所发生的时间,北斗设定的定位时间间隔时1
‑
5秒之间)。
[0023]
4、设定标准的时间颗粒度(设定为一分钟),记录北斗对象随着时间变化,其路段变化的集合,实现北斗多粒度时空数据模型构建。公式如下:s(t)={(q1,t1),(q2,t2),...,(q
n
,t
n
)}(公式1);其中q
i
表示路段的序号,t
i
表示时间颗粒度。
[0024]
步骤二,基于地理位置相似性,将对象进行分类,并求解对象的停留规律。
[0025]
1、为了简化对象运动规律分析的复杂性,采用地理轨迹相似度的方法对对象进行分类。基于对象在时空分布的特点,该方法对对象进行分类进行“时空切片”,也就是基于对象以
△
t为时间精度(设定为十分钟),找出对象在某一个时间精度范围内的地理位置相近性,以此反映具有相同偏好的“对象”在地理位置的活动规律。表示为:
[0026][0027]
该方法设置对象相似度s(u,v)的阈值为0.3,如果在一天相似度的计算大于0.3,那么将对象归为一类。如此,降低系统对对象活动规律求解的复杂度。其中t
i
(u)是指对象u在
△
t为时间范围内发生的定位的时间戳,上面通过设定标准的时间颗粒度(设定为一分钟)来进行标记,由于
△
t设定为十分钟,那么现在要计算15点01分到15点10分这个时间精度对象u和对象v的地理位置相近性,那么15点3分的时候对象u才开始运动,而对象v在15点1分已经开始运动了,虽然时间不同步,在15点1分和15点2分的时候,u和v的相似度为0,因为对象u没有数据。δ(q
i
(u),q
j
(v))表示地理位置的重合度,如果他们在某一个时间颗粒度下都在同一个路段,δ(q
i
(u),q
j
(v))就等于1,否则等于0。
[0028]
2、结合对象的速度和停留时间,求出相似对象的停留点。由于对象的轨迹具有随机性,为了解决随机性对对象轨迹预测的干扰,因此,需要提取停留点。该方法结合对象的速度和停留时间进行对象停留点的提取。假设对象的轨迹公式表示为:
[0029]
tr
i
={(q1,q2,t1,t2),(q2,q3,t2,t3),...,(q
n
‑1,q
n
,t
n
‑1,t
n
)}(公式3);
[0030]
如果对象在同一个路段逗留的时间t
n
‑
t
n
‑1大于时间阈值t,那么说明对象存在q
n
与q
n
‑1之间逗留;下一步,计算对象的速度,也存在一种情况,对象以低速运动,围绕着一个地方徘徊,因此通过对象的速度进行对象停留点衡量,v
n
=(|q
n
‑1‑
q
n
|)/(t
n
‑
t
n
‑1),如果在一个
△
t平均速度低于2m/s,那么则认为对象在某一个地方徘徊,也默认对象时停留的。为了简化模型,就取两个位置(两个路段)的中心点,毕竟该方法以设定标准的时间颗粒度(设定为一分钟)来进行标记,对于对象追踪来说,这个误差是存在的。上述通过时间和速度来提取对象的停留点,满足任何一种情况都认为对象时停留的。
[0031]
3、结合fp树挖掘对象的活动规律。结合上一步,把相似对象的停留时间进行提取后,得到相似对象群的停留信息以及停留次数;并采用fp树挖掘频繁项集,基于频繁项集,获取对象的活动频繁模式。
[0032][0033]
4、结合活动规律预测对象的轨迹或者轨迹异常分析,实现运载工具监管与分析。通过对相似对象运动规律的挖掘,该方法以fp树挖掘的运动规律来监管对象的实时轨迹,如果对象的实时轨迹与相似对象群中的频繁模式重合度过低或者没有找到对应的频繁模式,则系统认为该对象的轨迹存在异常,即可自动发出报警。
[0034]
该运载工具监管分析方法的创新点如下:1、结合通信基站泰森多边形的范围对抽
象后的数据进行联合泰森多边形和路网信息的空间语义表达,实现北斗时空数据的空间粒度的划分。2、构建北斗多粒度时空数据模型,考虑到北斗时空数据上报数据过于频繁,采用设定时间颗粒度(设定为一分钟),降低数据计算复杂度。3、采用“时间切片”的方式,创新性提出对象地理位置相似性将对象进行分类反映具有相同偏好的“对象”在地理位置的活动规律。4、结合对象的逗留时间和对象平均速度来获取对象停留点,以此解决对象轨迹随机性问题。5、采用fp树挖掘对象的频繁序列,实现对象运动规律构建,以此实现运载工具的轨迹预测并能够实现实时的监测与预警。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1