一种智慧餐厅用订单智能处理方法及系统与流程
1.本发明涉及智慧餐厅订单智能处理技术领域,特别是涉及一种智慧餐厅用订单智能处理方法及系统。
背景技术:
2.当前在餐饮领域,订单处理方式仍然较为传统,点单、对应于订单的餐饮品准确给到对应顾客,都需要专人处理,不仅人力成本高,而且出错率相对较高。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种成本低、不易出错的智慧餐厅用订单智能处理方法及系统。
4.技术方案:为实现上述目的,本发明的智慧餐厅用订单智能处理方法,其包括:
5.获取用户发送的未完成订单的信息;
6.将所述未完成订单的信息输出给服务人员;
7.获取已完成订单的信息;
8.获取所述已完成订单对应的餐饮品的存放位置,并将所述存放位置与所述已完成订单进行绑定;
9.获取用户提供的验证信息;
10.判断所述验证信息对应的订单信息是否为已完成订单,得到第一判断结果;
11.当所述第一判断结果为是,将相应的所述已完成订单对应的存放位置输出给用户。
12.进一步地,所述获取用户发送的未完成订单的信息包括:
13.判断等待时长是否达到设定时长,得到第二判断结果;
14.当所述第二判断结果为是,向服务器发送请求包;
15.获取服务器反馈的数据包,并读取所述数据包;
16.判断所述数据包中是否包含订单数据,是则将所述订单数据作为未完成订单的信息,否则将所述数据包删除。
17.进一步地,所述将所述未完成订单的信息输出给服务人员包括:
18.将所述未完成订单的信息通过显示屏上的画面输出,或将所述未完成订单的信息通过打印机打印成实体表单。
19.进一步地,所述方法还包括:
20.获取服务人员录入的订单更新信息;
21.根据所述订单更新信息将对应的所述未完成订单更新为已完成订单。
22.进一步地,所述获取已完成订单的信息包括:
23.通过扫码器获取随所述餐饮品附带的可识别码的信息以获得所述已完成订单的信息,所述可识别码为条形码或二维码。
24.进一步地,所述获取所述已完成订单对应的餐饮品的存放位置包括:
25.获取工作人员将新的餐饮品存放至临时存放区后所述临时存放区的最新存放信息;
26.将原先存储的最新存放信息变更为旧存放信息;
27.将所述最新存放信息与所述旧存放信息进行比对,得到差异位置信息;
28.将所述差异位置信息作为餐饮品的所述存放位置。
29.进一步地,所述将相应的所述已完成订单对应的存放位置输出给用户之后还包括:
30.获取所述临时存放区的最新存放信息;
31.将原先存储的最新存放信息变更为旧存放信息;
32.将所述最新存放信息与所述旧存放信息进行比对判断是否存在差异,得到第四判断结果;
33.当所述第四判断结果为是,获取所述最新存放信息与所述旧存放信息的变动位置信息;
34.判断所述变动位置信息与所述存放位置是否一致,是则将所述已完成订单更新为历史订单,否则通过警报装置发出警报。
35.一种智慧餐厅用订单智能处理系统,其包括:
36.第一获取模块,其用于获取用户发送的未完成订单的信息;
37.输出模块,其用于将所述未完成订单的信息输出给服务人员;
38.第二获取模块,其用于获取已完成订单的信息;
39.位置绑定模块,其用于获取所述已完成订单对应的餐饮品的存放位置,并将所述存放位置与所述已完成订单进行绑定;
40.第三获取模块,其用于获取用户提供的验证信息;
41.判断模块,其用于判断所述验证信息对应的订单信息是否为已完成订单,得到第一判断结果;
42.执行模块,其用于在所述第一判断结果为是时,将相应的所述已完成订单对应的存放位置输出给用户。
43.有益效果:本发明的智慧餐厅用订单智能处理方法及系统,通过线上下单、记录订单对应的餐饮品的存放位置以及根据顾客的验证信息为用户指引餐饮品的存放位置,可使顾客在多个环节进行自助处理,节约人力成本,且出错率低。
附图说明
44.附图1为订单处理装置的构成示意图;
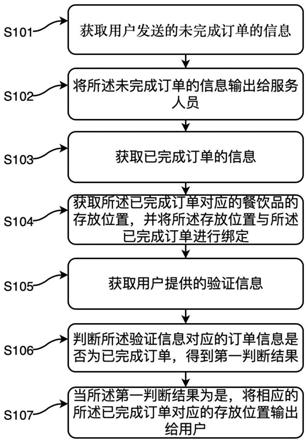
45.附图2为智慧餐厅用订单智能处理方法的流程示意图;
46.附图3为指引装置的第一立体图;
47.附图4为指引装置的第二立体图;
48.附图5为处于对齐状态的遮罩装置的结构图;
49.附图6为遮罩装置处于错开状态时指引装置的结构图;
50.附图7为处于错开状态的遮罩装置的结构图;
51.附图8为智慧餐厅用订单智能处理系统的模块构成示意图。
具体实施方式
52.下面结合附图对本发明作更进一步的说明。
53.本发明之智慧餐厅用订单智能处理方法基于订单处理装置,如附图1所示,订单处理装置包括控制中心1、信息输出单元2、信息获取单元3,上述信息输出单元2与获取获取单元均连接控制中心1。
54.如附图2所示的智慧餐厅用订单智能处理方法,该方法由上述控制中心1实施,其包括如下步骤s101
‑
s107:
55.步骤s101,获取用户发送的未完成订单的信息;
56.步骤s102,将所述未完成订单的信息输出给服务人员;
57.本步骤中,通过信息输出单元2将完成订单的信息输出给服务人员。
58.步骤s103,获取已完成订单的信息;
59.本步骤中,通过信息获取单元3获取已完成订单的信息,已完成订单的信息由服务人员提供;
60.步骤s104,获取所述已完成订单对应的餐饮品的存放位置,并将所述存放位置与所述已完成订单进行绑定;
61.步骤s105,获取用户提供的验证信息;
62.本步骤中,通过信息获取单元3获取验证信息,验证信息由顾客提供。
63.步骤s106,判断所述验证信息对应的订单信息是否为已完成订单,得到第一判断结果;
64.步骤s107,当所述第一判断结果为是,将相应的所述已完成订单对应的存放位置输出给用户。
65.优选地,上述步骤s101中所述获取用户发送的未完成订单的信息包括如下步骤s201
‑
s204:
66.步骤s201,判断等待时长是否达到设定时长,得到第二判断结果;
67.本步骤中,等待时长为上一次向服务器4发送请求包的时间到当前时间中的时间间隔。
68.步骤s202,当所述第二判断结果为是,向服务器4发送请求包;
69.本步骤中,也即等待时长每达到设定时长,就向服务器4发送一次请求包,控制中心1可定时获取未完成订单。
70.步骤s203,获取服务器4反馈的数据包,并读取所述数据包;
71.步骤s204,判断所述数据包中是否包含订单数据,是则将所述订单数据作为未完成订单的信息,否则将所述数据包删除。
72.本步骤中,由于有可能在非繁忙时段没有订单的情形,因此,服务器4中没有未完成订单,因此,数据包中可能没有订单数据,这些数据包可以直接抛弃。
73.优选地,上述信息输出单元2为显示屏或打印机,上述步骤s102中所述将所述未完成订单的信息输出给服务人员包括如下步骤s301:
74.步骤s301,将所述未完成订单的信息通过显示屏上的画面输出,或将所述未完成
订单的信息通过打印机打印成实体表单。
75.优选地,所述方法还包括如下步骤s401
‑
s402:
76.步骤s401,获取服务人员录入的订单更新信息;
77.本步骤中,每当服务人员处理完一个订单,服务人员向系统反馈订单更新信息。
78.步骤s402,根据所述订单更新信息将对应的所述未完成订单更新为已完成订单。
79.基于此,上述步骤s103中所述获取已完成订单的信息包括如下步骤s501:
80.步骤s501,通过扫码器获取随所述餐饮品附带的可识别码的信息以获得所述已完成订单的信息,所述可识别码为条形码或二维码。
81.本步骤中,由于餐饮行业中餐饮品上贴有可识别码或装餐饮品的托盘中放有带有可识别码的单据,因此,工作人员可将可识别码靠近扫码器以使扫码器扫到可识别码的信息。
82.优选地,上述步骤s104中所述获取所述已完成订单对应的餐饮品的存放位置包括如下步骤s601
‑
s604:
83.步骤s601,获取工作人员将新的餐饮品存放至临时存放区后所述临时存放区的最新存放信息;
84.步骤s602,将原先存储的最新存放信息变更为旧存放信息;
85.步骤s603,将所述最新存放信息与所述旧存放信息进行比对,得到差异位置信息;
86.步骤s604,将所述差异位置信息作为餐饮品的所述存放位置。
87.上述步骤s601
‑
s604中通过比对新、旧存放信息,可以得到新、旧存放信息的差异,即得到差异位置信息,差异位置信息即对应于通过信息获取单元3新获取的已完成订单的信息。
88.优选地,为了节约成本,上述临时存放区为用于摆放餐饮品的平面,可以是取餐台,上述最新存放信息由连接控制中心1的摄像头获取,控制中心1通过摄像头获取临时存放区的图像,并对图像进行识别,可获得临时存放区中所有存放信息,其中有的存放信息是已知的,有的存放信息是新产生的,通过对最新存放信息与旧存放信息进行对比,可得到哪些是新增加的存放信息,也即差异位置信息,将差异位置信息作为存放位置与已完成订单进行绑定关联后,顾客取餐饮品时可根据顾客提供的订单信息快速查询订单对应的餐饮品的位置信息。上述过程只需要通过一个摄像头即可完成所有的位置识别与绑定过程,不需要专门设置存储柜等专门的存储装置,可最大程度节约成本。
89.基于上述临时存放区(用于摆放餐饮品的平面)以及摄像头的组合,在优选的实施例中,为了向顾客直观指示餐饮品的位置以防止拿错,订单处理装置还包括指引装置5,指引装置5可向目标存放位置投射光斑以将目标餐饮品笼罩,基于此,上述步骤s107中所述将相应的所述已完成订单对应的存放位置输出给用户包括如下步骤s701:
90.步骤s701,通过指引装置5发射光斑至所述存放位置,使得光斑照射在相应的所述已完成订单对应的餐饮品上。
91.进一步地,上述步骤s107中所述将相应的所述已完成订单对应的存放位置输出给用户之后还包括如下步骤s801
‑
s805:
92.步骤s801,获取所述临时存放区的最新存放信息;
93.步骤s802,将原先存储的最新存放信息变更为旧存放信息;
94.步骤s803,将所述最新存放信息与所述旧存放信息进行比对判断是否存在差异,得到第四判断结果;
95.步骤s804,当所述第四判断结果为是,获取所述最新存放信息与所述旧存放信息的变动位置信息;
96.本步骤中,当第四判断结果为是,说明顾客已取走餐饮品。
97.步骤s805,判断所述变动位置信息与所述存放位置是否一致,是则将所述已完成订单更新为历史订单,否则通过警报装置发出警报。
98.通过上述步骤s801
‑
s805,控制中心1可判断顾客是否取走了对的餐饮品,若顾客取错餐饮品,则发出警报以提醒顾客。
99.指引装置5安装在所述临时存放区的上空,其包括光斑投射器51以及调节装置52,所述调节装置52具有两个运动轴,以带动所述光斑投射器51运动,使得所述光斑投射器51能够将光斑投射至所述临时存放区内的各个区域。
100.所述调节装置52包括固定座521、第一支架522以及第二支架523,所述第一支架522由第一电机524驱动相对于所述固定座521转动,所述第二支架523由第二电机525驱动相对于所述第一支架522转动;所述第一支架522相对于所述固定座521的旋转以及所述第二支架523相对于所述第一支架522的旋转构成所述调节装置52的两个运动轴。
101.上述光斑投射器51最终所投射出的光斑的形状与大小可调。具体地,为了使最终投射的光斑的形状与大小可调,所述指引装置5还包括遮罩装置53,所述遮罩装置53上具有供所述指引装置5发出的光通过的型孔,所述型孔用于改变所述光斑投射器51所投射出的最终光斑的形状。上述型孔的形状能够变化,使得指引装置5投射出的光斑能够根据目标餐饮品的轮廓而变化,光斑可充分将目标餐饮品覆盖,提货人员能更直观地知道哪些餐饮品属于他,不会拿错,也不会漏拿。
102.优选地,所述遮罩装置53相对于所述光斑投射器51的距离能够被调节,以改变所述光斑投射器51所投射出的最终光斑的大小,且所述遮罩装置53相对于所述光斑投射器51的角度能够被调节。
103.为了实现对上述型孔形状的调节,以及对遮罩装置53相对于光斑投射器51的姿态与角度的调节;所述遮罩装置53通过连接装置54连接所述光斑投射器51;连接装置54包括连接所述光斑投射器51的转动架541以及能相对于转动架541可控滑动的安装架542,所述遮罩装置53能够相对于安装架542的远离光斑投射器51的一端可控转动。转动架541通过回转环543安装在所述光斑投射器51上,回转环543能够由回转电机544驱动相对于光斑投射器51可控旋转,且其旋转轴与光斑投射器51的投射方向平行。
104.遮罩装置53包括组件座531;所述组件座531转动安装在安装架542上,两者之间安装有用于驱动两者相对转动的调节电机532;所述遮罩装置53还包括安装在组件座531上的型孔形状变化组件,如附图3
‑
4所示,所述型孔形状变化组件包括多个带有方形通孔的框体533,所有框体533叠放在一起形成框体组合;框体组合一端的框体533相对于组件座531固定,其他框体533均相对于组件座531转动安装,且框体组合另一端的框体533与组件座531之间设置有驱动元件534,驱动元件534使框体533相对于组件座531旋转,本实施例中,驱动元件534包括相对啮合的小齿轮c与弧形齿条d,小齿轮c安装在组件座531上,并由安装在组件座531上的电机驱动转动,弧形齿条d固定在框体533上;每个框体533上均具有凸出的销
轴部a以及凹陷的弧形条孔b,对于每两个相邻的框体533,其中一个框体533的销轴部a嵌入在另一个框体533的弧形条孔b内。在顺时针方向上,所有弧形条孔b均由各自的第一端延伸至第二端,框体组合可在对齐状态与错开状态之间切换,对齐状态下,如附图5所示,所有弧形条孔b内的销轴部a均位于其第一端,此时,所有框体533的正方形通孔相互重合,错开状态下,如附图7所示,所有弧形条孔b内的销轴部a均位于其第二端,此时,每相邻两个框体533的正方形通孔相互错开的角度均相等,此时,指引装置5的状态如附图6所示,如此,框体组件中间的可供光穿过的型孔为近似于圆形的多边形孔,使得光斑投射器51最终投射出来的光斑的形状为近似圆形的多边形,可视作是圆形光斑。通过调节电机532调节遮罩装置53相对于光斑投射器51的角度,可在光斑投射器51斜照时,对最终投射出的光斑的形状进行矫正,使得光斑尽量接近圆形。
105.此外,遮罩装置53还包括梯度调节装置,其包括间距调节装置与斜度调节装置;如附图4所示,所述组件座531为方形,其有两对相互平行的侧边,其一对相互平行的侧边处均安装有间距调节装置,其另一对相互平行的侧边分别连接有一组斜度调节装置;每组间距调节装置均包括两个滑块535以及用于驱动两个滑块535等速反向运动的直线模组536;所述斜度调节装置包括调节杆537以及连接在调节杆537与组件座531侧边之间的弹性带538,弹性带538为不透光材质制成。调节杆537的一端铰接在一间距调节装置的滑块535上,另一端相对于另一间距调节装置的滑块535滑动安装。如此,通过分别控制两组间距调节装置的滑块535做相对靠近与远离运动,可调节两组调节杆537的间距与相对斜度,光线可从两组调节杆537之间透出,两组调节杆537之外的光线都会被弹性带538遮住,在光斑投射器51斜照时,对最终投射出的光斑的形状进行矫正,使得光斑尽量接近正方形或长方形形状。
106.通过对上述遮罩装置53进行控制,可实现对型孔的形状进行调节,对遮罩装置53的姿态进行调节,可在光斑投射器51倾斜照射时,使其投射的光斑的形状接近圆形或方形。
107.本发明还提供了一种智慧餐厅用订单智能处理系统900,智慧餐厅用订单智能处理系统900可以包括或被分割成一个或多个程序模块,一个或者多个程序模块被存储于存储介质中,并由一个或多个处理器所执行,以完成本发明,并可实现上述智慧餐厅用订单智能处理系方法。本发明实施例所称的程序模块是指能够完成特定功能的一系列计算机程序指令段,比程序本身更适合于描述智慧餐厅用订单智能处理系统900在存储介质中的执行过程。以下描述将具体介绍本实施例各程序模块的功能,如附图8所示,智慧餐厅用订单智能处理系统900包括:
108.第一获取模块901,其用于获取用户发送的未完成订单的信息;
109.输出模块902,其用于将所述未完成订单的信息输出给服务人员;
110.第二获取模块903,其用于获取已完成订单的信息;
111.位置绑定模块904,其用于获取所述已完成订单对应的餐饮品的存放位置,并将所述存放位置与所述已完成订单进行绑定;
112.第三获取模块905,其用于获取用户提供的验证信息;
113.判断模块906,其用于判断所述验证信息对应的订单信息是否为已完成订单,得到第一判断结果;
114.执行模块907,其用于在所述第一判断结果为是时,将相应的所述已完成订单对应的存放位置输出给用户。
115.其他基于上述智慧餐厅用订单智能处理系统900实现上述智慧餐厅用订单智能处理方法的内容在之前实施例中已经详细介绍,可参考之前实施例中的对应内容,此处不再赘述。
116.本发明的智慧餐厅用订单智能处理方法及系统,通过线上下单、记录订单对应的餐饮品的存放位置以及根据顾客的验证信息为用户指引餐饮品的存放位置,可使顾客在多个环节进行自助处理,节约人力成本,且出错率低。
117.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1