全自动化边装卸集装箱码头的智能水平运输系统及方法与流程
1.本发明属于码头运输控制技术领域,尤其涉及全自动化边装卸集装箱码头的智能水平运输系统及方法。
背景技术:
2.集装箱码头作为集装箱运输网络的关键环节,其对集装箱的装卸及运输效率决定着集装箱运输整个流程的时间及经济效益,是港口核心竞争力的重要体现。自动化集装箱码头相对于传统码头具有高效、环保、低人力成本等优势,成为集装箱码头未来发展的必然趋势。岸桥、art(artificial intelligence robot of transportation,即人工智能运输机器人)和场桥是自动化集装箱码头装卸及运输过程的主要设备,三者相互关联、相互影响,岸桥位于码头前沿,负责船舶上集装箱的装卸,其装卸效率决定船舶在港口的滞留时间。
3.综合集装箱码头的自动化发展现状,考虑可持续性发展需求与低碳绿色发展目标,实现港口内各系统互连,提高港口水平运输设备的工作效率,成为提升集装箱码头全自动化作业水平的关键一环。
4.在岸桥装卸次序表已知的情况下,如何使岸桥、art和场桥高效协同作业,使岸桥最短时间完成船舶装卸,具有重要的理论意义和经济价值。
技术实现要素:
5.本发明的目的是提出一种全自动化边装卸集装箱码头的智能水平运输系统及方法,该智能水平运输系统能使自动化水平运输车辆能够适应码头多类型作业需求,同时与其他系统进行实时交互,完成信息传输及利用,提高码头整体作业系统的实时感知及处理能力。
6.本发明一方面是,提供一种全自动化边装卸集装箱码头的智能水平运输系统,包括无人驾驶的art构成的水平运输设备,以及对所述art进行智能管控以使art完成水平运输的水平运输控制系统;该水平运输控制系统与tos、自动化场桥、自动化岸桥、art实时连接和通讯,完成信息交互处理,实现信息互联互融,保证信息实时利用和art的智能化控制;该水平运输控制系统通过执行以下功能实现对水平运输设备的智能管制:智能任务调度:基于水平布置边装卸工艺,结合包含装卸船、移箱的水平运输作业计划和水平运输设备实时位置,以全局最快作业时间和全局最短作业路径为原则,为水平运输设备分配作业任务:首先,基于全局最快作业时间原则生成初步的车辆运输路径及时间规划;接着,运用全局最短作业路径原则修正部分路线规划,降低港区道路拥堵情况,最终实现最优作业效率;动态路径规划:基于水平布置边装卸工艺,利用高精地图技术构建码头道路拓扑结构,结合实时道路信息和水平运输设备的大角度转弯、蟹行通行的运动学特征,运用动态路径规划算法,实时规划作业车辆的行驶路径,通过全局路径规划和局部精细化引导相结
合的模式实现车车协同,解决交通死锁问题,确保水平运输交通稳定有序;标准化控制接口:基于无人驾驶行业规范定义标准接口,实现水平运输设备和系统的解耦设计,通过标准接口兼容不同运动学特征和无人驾驶技术路线的水平运输设备,采用物联网mqtt通讯协议底座实现实时通讯;智能交通管理:利用车路协同技术实时感知外集卡位置和数量,通过北斗高精定位技术实时定位和预测内部水平运输设备位置,通过多优先级的动态管控策略实现内外部车辆的空间和时间隔离,实现陆运和航运交叉路口的智能交通管理,保证作业安全;锁站智能管控:基于地面集中式拆装锁工艺,结合船舶靠泊位置和拆装锁任务量,一键配置锁站数量及锁站位置,根据船舶历史作业数据自动生成拆装锁任务清单,通过动态分配算法选择最优锁岛,避免锁站拥堵,确保拆装锁作业效率;同时,基于地锁站内部搭载的智能安全管控机制,实现自动化作业与人工作业的整体隔离,保障拆装锁作业安全可靠;车辆智能调序:基于三级水平布置动态缓冲区工艺,结合实际装船模式要求,利用事前科学决策、事中差速控制和事后临时缓冲,对所有水平运输作业车辆前后顺序进行实时调控,保证运输车辆按照规定的作业次序到达岸桥作业区有序进行装船作业;智能充电调度:基于集中式侧方位充电工艺,结合集装箱水平运输作业的运力和动力需求,利用阶梯性动态充电调度策略,充分考虑群体充放电平衡的基本前提下,实时决策充电时机和充电时长,结合水平运输设备的运动学特征选择充电桩,通过构建的充电桩设备管理平台,实现自动对位和自动充电控制,确保水平运输车辆整体动力持续稳定;智能停车管理:基于水平布置边装卸工艺,结合泊位计划及海侧装卸船作业计划,动态设置停车区域充分利用物理空间,结合运输车辆运动学特征和未来可能的作业任务,动态分配停车区域及停车位置,满足快速出勤需求,提高运输车辆利用率并缩短任务等待时间;智能远程驾驶:定义标准控制接口,通过标准接口兼容不同运动学特征的水平运输设备,基于5g高带宽低延时能力,实现远程操控台对智能水平运输设备的远程实时监管及控制,以及通过远程操控台实现水平运输设备的一对多远程驾驶监管与控制。
7.本发明的另一方面是,提供一种全自动化边装卸集装箱码头的智能水平运输方法,基于本发明第一方面的所述的智能水平运输系统实现,包括以下步骤:s1.水平运输控制系统使用高精度移动测量设备对码头道路信息采集,制作码头高精地图底图,构建动态图层并保持实时更新,为art路径规划和实时监控提供基础环境;s2.水平运输控制系统结合包括装卸船、移箱的水平运输作业计划和水平运输设备实时位置,以全局最快作业时间和全局最短作业路径为原则,为水平运输设备分配作业任务;s3.水平运输控制系统基于动态路径规划算法为水平运输设备生成实时任务路径,确定各项运输任务的起点和终点,关键区域利用区间控车技术实现车车协同,控制关键路径的交通死锁;s4.水平运输设备通过标准化控制接口接入水平运输控制系统,实时上报自身位置和状态,接收作业任务和行驶路径;s5.车辆行驶过程中,水平运输控制系统基于码头高精地图数据以及车辆实时位
置、行驶速度和优先级数据,对车辆进行动态路径规划和速度调整;同时,水平运输设备利用包括车载雷达、单目相机的传感设备自主完成避障、控速、停车动作,主动规避风险,按照规定的时间和地点完成水平运输任务;s6.当水平运输设备行驶到位于堆场出入口的外集卡的通行交汇处时,实时感知内外集卡的数量和位置,基于多优先级的通行管控策略,实时决策车辆通行次序;s7.当水平运输设备行进到锁站拆装锁作业时,根据各锁站实时工作状态,为作业车辆分配相应锁站及前缓冲区,同时规划车辆在锁站区的行驶路径,拆装锁过程中利用安全管控策略确保安全作业;s8.拆装锁完成后,水平运输设备根据水平运输控制系统的调度前往岸桥或堆场作业位进行装卸船作业,作业位有其他车辆时,水平运输控制系统负责分配临时等待位;s9.水平运输任务执行中或完成后,根据阶梯性动态充电调度策略评估art是否需要充电,如需要充电系统负责在任务完成后将art自动下线,分配充电桩执行侧方位充电完成后自动恢复上线,继续参与水平运输作业;s10.当车辆完成当前作业任务且无后续计划任务时,水平运输控制系统负责结合后续作业计划和快速出勤的需求,按照区域优先级分配停车区域和停车位,并将art自动下线;s11.在对智能运输车辆进行全天候动态监管中,水平运输控制系统基于智能任务管理和智能远程驾驶模块实现车辆特殊工况和异常状态的及时管理和远程操控。
8.本发明的智能水平运输系统,能与码头tos、自动化场桥、自动化岸桥、智能水平运输设备等子系统实时连接和通讯完成信息的交互处理,通过进行互联互融,完成信息的实时传递与融合,保证信息的实时利用和水平运输设备的智能化控制。
9.为解决好系统和水平运输设备的行为边界问题,利用全局路径规划和区间控车相结合的模式,通过智能水平运输系统上帝视角定义关键区间,结合单车运动学特征设定关键区间的建议速度、时间窗口以及允许偏移里的最大范围,在充分发挥单车智能的同时解决路径交汇点等关键区域的交通死锁问题。
10.本发明的智能水平运输系统通过定义标准化控制接口,实现系统和水平运输单车的解耦设计,打造开放生态,有效降低点阵密集程度,大幅降低网络通讯压力,结合车辆运动学特征,有效降低关键路径点的死锁问题,进一步优化车辆编队行驶能力。在全局路径规划和单车智能间磨合平衡点,为实现远期作业目标和发挥单车智能预留无限空间,依托水平布置边装卸工艺特色,创造拥有可推广性的自动化驾驶技术路线。
11.相对于传统水平运输设备管理模式,本发明在码头水平运输任务分派及处理中,根据实时工况信息对水平运输作业进行处理及调整,保证港口工作的流畅性,减少拥堵情况。本发明将水平运输管理流程全自动化,基于系统灰度升级、多重保护及故障恢复机制,实现作业系统的可持续运行,并根据港口实时作业数据对设备作业计划进行调整,提升水平运输全系统的作业效率。同时,打破传统模式首次实现水平运输设备和系统的解耦设计,通过标准接口兼容多种不同类型水平运输设备,构建开放生态,驱动无人驾驶技术在自动化集装箱码头行业的高质量发展。
附图说明
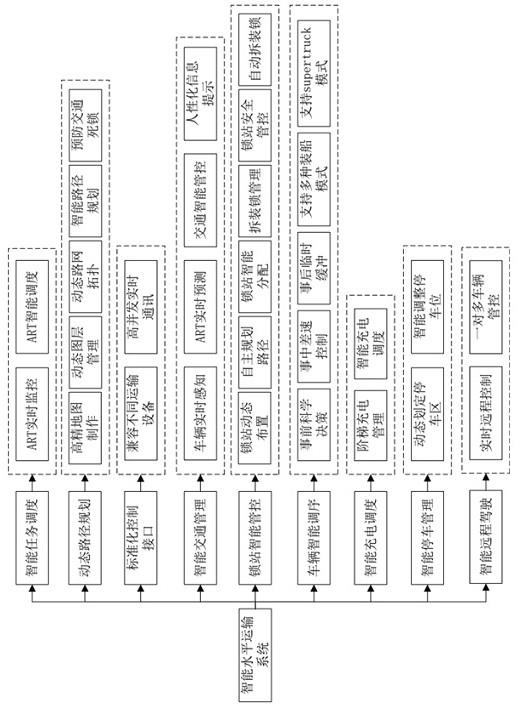
12.图1为本发明实施例提出的全自动化边装卸集装箱码头的智能水平运输系统控制系统的结构图;图2为本发明实施例提出的全自动化边装卸集装箱码头的智能水平运输方法的流程图;图3为本发明实施例提出的全自动化边装卸集装箱码头的智能水平运输系统的设计概要图;图4为本发明实施例提出的art在非结构化场景下动态路径规划示意图;图5为本发明实施例提出的art多车协同示意图;图6为本发明实施例提出的art在偏离允许范围下具体动作的精细化引导示意图;图7为本发明实施例提出的art在直角转向场景下的自主路径规划示意图;图8为本发明实施例提出的art在多障碍避障等场景下的自主路径规划示意图。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.本发明实施例提出的全自动化边装卸集装箱码头的智能水平运输系统,包括无人驾驶的自动运输车辆art构成的水平运输设备,以及对所述自动运输车辆art进行智能管控、以使该自动运输车辆art完成水平运输的水平运输控制系统;该水平运输控制系统与tos(terminal operation system,即码头管理系统)、自动化场桥、自动化岸桥、自动运输车辆art实时连接和通讯,完成信息交互处理,实现信息互联互融,保证信息实时利用和自动运输车辆art的智能化控制;如图1所示,水平运输控制系统通过执行以下功能,以实现对水平运输设备的全面智能控制,完成水平运输任务:p 1.智能任务调度:基于水平布置边装卸工艺,结合装卸船、移箱等水平运输作业计划和水平运输设备实时位置,以全局最快作业时间和全局最短作业路径为原则,为水平运输设备分配作业任务:首先,基于全局最快作业时间原则生成初步的车辆运输路径及时间规划;接着,运用全局最短作业路径原则修正部分路线规划,降低港区道路拥堵情况,确保任务调度的合理性,最终实现最优作业效率;智能任务调度具体功能有:p1.1.art实时监控:动态获取码头装卸船、移箱等水平运输作业任务,实时监控港区全部art的作业状态、行驶位置及行驶速度等;p1.2.art智能调度:筛选港区剩余电量充足的空闲art,以总行驶时间最短原则为每辆art分配运输任务。同时,在降低港区路网拥堵的原则下,为每辆art规划行车距离最短的路线;p 2.动态路径规划:基于水平布置边装卸工艺,利用高精地图技术构建码头道路拓扑结构,结合实时
道路信息和水平运输设备运动学特征,运用动态路径规划算法,实时规划作业车辆的行驶路径,通过全局路径规划和局部精细化引导相结合的模式实现车车协同,有效解决交通死锁问题,确保水平运输交通稳定有序;其中,所述高精地图技术具体包含:p2.1.高精地图制作:使用高精度移动测量设备进行专业规范的采集,基于地图生成算法和流程,完成码头动态复杂环境的高质量地图的制作,在相关作业区域达到横向绝对精度20cm;p2.2.动态图层管理:以高精地图为底图集成码头实时动态的地图信息,构建动态图层管理能力,在底图上增加多个动态图层,将不同更新频率的信息绘制到不同的动态图层中并保持实时刷新,更适合与描述动态交通环境,尤其在底图上增加的路径规划图层,用于描述各种通行区域的属性以及通行规则;p2.3.动态路网拓扑:由于船舶大小、停靠位置、锁站布置、道路封闭等导致港区道路拓扑结构出现变更,利用符合场地条件的动态路径生成算法,构建道路最优拓扑关系,实时设定art在非结构化港区场景下的最优路径,为路径规划算法模块提供实时的基础道路信息,保证厘米级的车辆协同管理。
15.其中,高精地图数据制作流程如下:p2.4.数据采集:利用高精度移动测量设备进行港区数据采集,包含道路数据、锁站、堆场等场景的数据采集;p2.5.数据处理及更新:基于地图生成算法和流程,适应码头动态复杂环境的数据处理,基于规模化生产,实现地图的维护更新;p2.6.元素识别:基于深度学习的点云分类及元素识别进行地图各种要素的识别;p2.7.人工验证:验证车道线、路沿、信号灯、标志牌、虚拟道路等位置及其逻辑关系是否准确;p 2.8.生成地图产品:包含点云静态地图、定位底图及高精地图。
16.其中,自动化集装箱码头高精地图系统由地图生产平台、设备信息平台和地图云服务平台组成。其中,高精地图生产平台负责将高精地图底图数据上架至地图云服务平台;设备信息平台用于收集岸桥、art的位置数据,并上报至地图云服务平台;地图云服务平台将地图、导航等具体信息下发至art。
17.其中,所述动态路径规划算法具体包含:p2.9.智能路径规划:基于动态路网拓扑结构,结合水平运输设备的运动学特征及交通现状,利用时空一致性路径规划算法动态、实时规划行驶路径。同时,为解决好系统和水平运输设备的行为边界问题,将全局作业调度、全局路径规划、局部精细化引导和单车执行控制相结合,通过智能水平运输系统上帝视角定义关键区间,结合单车运动学特征设定关键区间的建议速度、时间窗口以及允许偏移里的最大范围,在充分发挥单车智能的同时解决路径交汇点等关键区域的交通死锁问题,创造可推广可复制的自动驾驶技术路线。如图4所示,当art作业路径临时封闭导致道路最优拓扑关系出现变更时,算法根据道路封闭情况动态调整路径拓扑结构,满足art运输作业需求;所述全局作业调度是基于集装箱码头岸桥装卸和堆场水平转运作业实际需求,以水平运输车队整体作业时间最小为原则,合理调配art执行水平运输任务,保证码头装卸及
运输各环节作业的连贯性,提高整体作业效率;所述全局路径规划,是基于任务的起点和终点,以及中途解挂锁、顺势机检、临时禁行区等随机任务,结合水平运输车辆的运动学特征和道路的使用原则规划全局路径,并确保最短行驶路径。基于上述全局控车策略,利用支持多运动学模型的时空一致性无碰撞平滑路径规划算法实时生成art在直线换道、交汇口转向等场景下的无碰撞路径,确保各水平运输任务互不干扰,有效降低关键路径点的死锁问题。如图5所示,当港区关键路段出现多车会车情况时,算法基于art作业优先级,智能生成车辆通行次序、速度、坐标、路径、时间等关键指标,实现多车协同行驶,避免碰撞及拥堵问题。
18.所述局部精细化引导,是基于上述全局路径控车策略,对车辆直角弯、u型弯、变道、掉头等具体行为设定偏离允许范围,进行art具体动作的精细化引导,充分发挥单车智能控制优势,实现水平运输作业的高效进行。同时,在全局路径规划的基础上进行art控制点优化,可有效降低点阵密集程度,大幅缓解网络通讯压力;如图6所示,通过设置art直角转弯时的偏离允许范围,引导车辆自主完成转弯动作。上述过程主要基于art自身控制逻辑及运动学特征,允许车辆自主规划转弯路径、通行速度和时间等,降低了水平运输系统对单车的控制通信压力。
19.所述单车执行控制,是基于art自身搭载的单目相机、雷达等探测设备,利用基于深度学习技术的智能控制算法,结合车辆自身的运动学特征,实现art自主变道、避障、控速、停车等,保障水平运输作业安全。如图7
‑
8所示,结合实际运输过程出现的转弯、避障等情况,art综合运用自身搭载的多种传感器,实时构建通行环境的slam模型,基于单车行驶控制算法,合理选择车辆避障模式及路径。如图7所示,车辆在直角转弯场景下,选择静态避障方式(车身航向角度变化,部分轮胎偏转,其余轮胎保持不变)实现车辆转向通行;如图8所示,车辆在躲避多个障碍物时,通过蟹行通行方式(车身航向角度保持不变,车辆全部轮胎向同一方向偏转相同角度)实现车辆的自主避障。
20.其中,支持多运动学模型的时空一致性无碰撞平滑路径规划算法具体为:首先根据art的位置信息优化a
‑
star算法中的估价函数,其次通过提取关键转折点、删除冗余转折点来保留关键点,保证了全局路径最优,最后融入基于车辆动力学特征的动态窗口算法,构造考虑全局最优的评价函数,实现车辆实时动态路径规划。
21.根据art位置信息,重新设置a
‑
star算法中启发函数的权重函数,改进后的估价函数具体表示为:其中,表示从起点到节点n路径的确切成本,称为代价函数;表示从节点n到目标的启发式估计成本,称为启发函数;r为当前点到目标点距离,r为起始点到目标点距离。
22.a
‑
star算法得出的全局路径为一次性规划出的折线路径,这使art运行的速度、加速度不稳定,不符合art运动学特征,运输车辆的行驶过程存在较大风险,容易导致车辆运行故障。动态窗口算法可根据art运行的关键局部路径,实时规划动态平滑路径,保证车辆行驶在稳定的速度区间,确保运输过程平稳。但在实时动态环境中单独使用动态窗口算法
时,art容易偏离目标路径,不能满足art对路径规划算法的精度要求。
23.将改进型a
‑
star算法与动态窗口算法进行融合,设计一种考虑全局最优路径的动态窗口评价函数,具体如下:其中, 表示车辆速度, 表示车辆角速度, 为模拟轨迹终点方向与当前目标点之间的方位角偏差,当前目标点是art前进方向上距离当前点最近的全局最优路径序列点;表示art轨迹上离障碍物的最近距离;表示当前速度大小的评价函数;为归一化系数;为权重系数。改进的评价函数使得局部路径规划遵循全局最优路径轮廓,从而提高局部路径与全局路径的匹配精度。
24.其中,所述支持多运动学模型的时空一致性无碰撞平滑路径规划算法具体应用过程如下:s210.解析当前自动化集装箱码头art车辆的行驶速度、路径、关键点等数据;s212.在a
‑
star算法的路径搜索过程中建立子节点数据表和路径节点数据表;s213.将路径起点作为当前初始节点,分别计算起始点周围八个方向节点的估价函数值;s214.在子节点数据表中存放当前节点及其周围八个方向节点的估价函数计算值,同时将估价函数值按照升序方式排列所有节点,将计算值最低的节点更新为初始节点并放入路径节点数据表;s215.路径节点数据表存放规划路径上当前最优节点信息,该表组成的路径即为初步规划出的路径;s216.循环执行步骤s212至s215,直到找到终点,路径节点数据表包含的路径即为a
‑
star算法规划出的全局路径;s217.基于上述全局路径数据,提取art在关键局部路径的行驶速度、转向角等主要信息;s218.基于动态窗口算法对局部路径实施二次规划,得到art在下一阶段不同速度对应的局部规划路径;s219.结合art运动学模型及其在上一单位时间内的运动轨迹,利用考虑全局最优路径的动态窗口评价函数,对art下一阶段全部的局部路径及速度进行评估,选择最优轨迹和速度作为当前车辆在下一阶段的行车规划。
25.其中,全局路径规划具体包含以下步骤:s201.将码头内部art行驶道路区域构建网格世界,标注出art的起点、终点,以及从起点行驶至终点过程中必经的关键点;s202.网格根据art的起点、中间关键点、终点检索选择art行驶最短直线路径;岸边作业区,在道路封闭情况下动态调整最优拓扑关系,根据场地障碍物离线生成结构化道路;s203.通过网格线路插值,将最短路径依据车辆行驶动力学特征拟合为行驶路径,拟合过程中网格级路径优先;
s204.art行驶过程中,在全场景下,优先通过纵向速度规划方法协调art运行,实现多车协同行驶。
26.p 2.10.预防交通死锁:基于车辆实时位置和行驶速度,提前预测各交通节点的拥堵情况,及时调整车辆行驶速度、路径等,解决码头关键路段拥堵问题。
27.p3.标准化控制接口:基于无人驾驶行业规范定义标准接口,打破传统自动化码头的紧耦合模式,首次应用在基于无人驾驶技术的新一代全自动化码头领域,实现水平运输设备和系统的解耦设计,通过标准接口兼容不同运动学特征和无人驾驶技术路线的水平运输设备,采用物联网mqtt通讯协议底座实现高质量、高并发实时通讯;具体功能如下:p3.1.兼容不同运输设备:设计智能水平运输设备标准接口,实现运输设备和系统的解耦设计,兼容不同无人驾驶技术的水平运输设备;p 3.2.高并发实时通讯:基于高通量的物联网通讯底座实现高并发实时通讯。
28.p4.智能交通管理:利用车路协同技术实时感知外集卡位置和数量,通过北斗高精定位技术实时定位和预测内部水平运输设备位置,通过多优先级的动态管控策略实现内外部车辆的空间和时间隔离,实现陆运和航运交叉路口的智能交通管理,保证作业安全;其中,基于多优先级的动态管控策略具体为:(1)港区art通行的优先级高于外集卡,当art与外集卡通行汇合时,art先通行;(2)当外集卡等待时间超过20分钟或者外集卡等待数量高于3辆时,强制外集卡通行;具体功能如下:p4.1.车辆实时感知:基于车路协同技术实时感知外集卡位置和排队数量,基于实时运行数据,实时感知水平运输设备运行速度及位置;p4.2.art实时预测:基于art水平运输作业状态、行驶速度、位置等信息,实时预测art达到重要交通路段的时间,提前判断车辆行驶路径是否会出现拥堵情况,适时对车辆行驶速度或路径进行调整;p4.3.交通智能管控:通过外集卡实时感知和art实时预测,基于多优先级的动态管控策略,在保证art优先通行的基础上,动态调控外集卡通行次序,实现路口的智能化和人性化管理,解决路口拥堵问题,实现整体水平运输任务的最优化;p4.4.人性化信息提示:在交叉路口安装rfid、高速道杆、红绿灯、led屏等设备进行通行信息的实时提示和引导,方便外集卡司机的运输作业。
29.p 5.锁站智能管控:基于地面集中式拆装锁工艺,结合船舶靠泊位置和拆装锁任务量,一键配置锁站数量及锁站位置,根据船舶历史作业数据自动生成拆装锁任务清单,系统通过动态分配算法选择最优锁岛,避免锁站拥堵,确保拆装锁作业效率;同时,锁站内部搭载智能安全管控机制,实现自动化作业与人工作业的整体隔离,保障拆装锁作业安全可靠;具体功能如下:p 5.1.锁站动态布置:根据集装箱装卸作业量、岸桥配置计划及船舶长度,动态设置锁站数量及锁站位置;
p 5.2.自主规划路径:根据锁站实际布置位置,动态编排水平运输设备的行驶路径,保证锁站区域交通流不形成死点;p5.3.锁站智能分配:为保证各锁站作业的均衡性,基于锁站实时作业情况,利用智能分配算法,实时进行作业车辆与锁站的动态分配;p5.4.拆装锁任务管理:根据船舶结构和历史作业数据,一键生成拆装锁任务清单,支持双人、四人以及智能拆装锁机器人作业模式,合理分配任务,操作便捷;p5.5.锁站安全管控:为确保人工拆装锁作业安全,利用机器视觉和位置检测的融合感知方法判定锁岛安全状态,非安全状态时直接联动水平运输设备紧急制动,确保人员安全;p5.6.自动拆装锁:通过运用智能拆装锁机器人进行全自动拆装锁作业,实现锁站系统全流程自动化运行,提高作业效率,保障作业安全。
30.p 6.车辆智能调序:基于三级水平布置动态缓冲区工艺,结合实际装船模式要求,利用事前科学决策、事中差速控制和事后临时缓冲,对所有水平运输作业车辆前后顺序进行实时调控,保证运输车辆按照规定的作业次序到达岸桥作业区有序进行装船作业;其中,三级水平布置动态缓冲工艺是,将art缓冲作业区分为堆场作业缓冲区、岸桥下作业缓冲区以及岸桥后锁站缓冲区,在art运输过程中,根据系统调度指令,动态安排距离当前art最近的缓冲区,执行车辆调序任务;具体功能如下:p6.1.事前科学决策:在作业任务调度和分配过程当中,充分考虑任务的优先级、设备作业时间、水平运输设备的位置和行驶里程,确保基本的装船作业顺序;p6.2.事中差速控制:在运输车辆行驶过程中,根据实时交通状况预测车辆可能的先后顺序并动态调整车辆行驶速度,确保车辆尽可能按照既定的先后顺序达到作业位置;p6.3.事后临时缓冲:速度调控失效后,利用锁站区域的三级缓冲区实现水平运输车辆的次序调控;p6.4.支持多种装船模式:支持严格装船、灵活装船和自由装船模式,为匹配不同装船模式的需求,执行差异化的车序调整方法;p 6.5.支持supertruck模式:为响应临时运输任务分派,执行supertruck车辆运输规则,即将紧急运输任务及运输车辆设置为最高优先级,安排车辆通行路径及时间,在最短时间内完成该任务的运输工作,以响应临时运输任务分派。
31.p 7.智能充电调度:基于集中式侧方位充电工艺,结合集装箱水平运输作业的运力和动力需求,利用阶梯性动态充电调度策略,在充分考虑群体充放电平衡的基本前提下,实时决策充电时机和充电时长,结合水平运输设备的运动学特征合理选择充电桩,并通过特别构建的充电桩设备管理平台,实现自动对位和自动充电控制,确保水平运输车辆整体动力持续稳定,具体功能如下:p7.1.阶梯充电管理:根据码头作业实际情况,执行不同的车辆充电策略,在按时完成各项运输任务的前提下,实现车队整体充放电均衡,保证车队整体电量维持在合理水平;
p7.2.智能充电调度:基于机器学习等大数据分析技术,实现车辆充电的智能管理,降低充电次数,保护电池寿命。
32.p 8.智能停车管理:基于水平布置边装卸工艺,结合泊位计划及海侧装卸船作业计划,动态设置停车区域充分利用物理空间,结合运输车辆运动学特征和未来可能的作业任务,动态分配停车区域及停车位置,满足快速出勤需求,提高运输车辆利用率并缩短任务等待时间,具体功能如下:p 8.1.动态划定停车区:根据码头实际作业情况,动态调整内集卡停车区域,缩短集卡运输距离,保证堆场重进重出和岸边边装边卸的具体要求;p8.2.智能调整停车位:根据车辆运动学特征,科学设定停车位,满足车辆快进快出要求;p9.智能远程驾驶:定义标准控制接口,基于5g高带宽低延时能力,通过远程操控台实现水平运输设备的一对多远程驾驶,通过标准接口兼容不同运动学特征的水平运输设备,辅助智能水平运输系统解决特殊工况下的作业难题;具体功能如下:p 9.1.实时远程控制:基于5g网络高带宽低延时能力,实现远程操控台对智能水平运输设备的远程实时监管及控制;p9.2.一对多车辆管控:通过远程操控台实现对水平运输设备的一对多远程管控,解决特殊工况下的作业需求;本发明实施例的全自动化边装卸集装箱码头的智能水平运输方法,如图2所示,具体包括以下步骤:s1.水平运输控制系统使用高精度移动测量设备对码头全部道路信息进行专业规范的采集,加工制作码头高精地图底图,构建动态图层并保持实时更新,为art路径规划和实时监控提供基础环境;s2.水平运输控制系统结合装卸船、移箱等水平运输作业计划和水平运输设备实时位置,以全局最快作业时间和全局最短作业路径为原则,为水平运输设备分配作业任务;s3.水平运输控制系统基于动态路径规划算法为水平运输设备生成实时任务路径,确定各项运输任务的起点和终点,关键区域利用区间控车技术实现车车协同,有效控制关键路径的交通死锁问题;s4.水平运输设备通过标准化控制接口接入水平运输控制系统,实时上报自身位置和状态,接收作业任务和行驶路径;s5.在车辆行驶过程中,水平运输控制系统基于码头高精地图数据以及车辆实时位置、行驶速度和优先级数据,对车辆进行动态路径规划和速度调整。同时,智能运输车辆利用车载雷达、单目相机等传感设备自主完成避障、控速、停车动作,主动规避风险,按照规定的时间和地点完成水平运输任务;s6.当水平运输车辆行驶到位于堆场出入口的外集卡的通行交汇处时,智能交通管理模块实时感知内外集卡的数量和位置,基于多优先级的通行管控策略,实时决策车辆通行次序;s7.当水平运输车辆行进到锁站进行拆装锁作业时,水平运输控制系统根据各锁
站实时工作状态,为作业车辆分配相应锁站及前缓冲区,同时规划车辆在锁站区的行驶路径,拆装锁过程中利用安全管控策略确保安全作业;s8.拆装锁完成后,水平运输设备或车辆根据水平运输控制系统的调度前往岸桥或堆场作业位进行装卸船作业,作业位有其他车辆时,水平运输系统负责分配临时等待位;s9.水平运输任务执行中或完成后,充电调度模块根据阶梯性动态充电调度策略评估art是否需要充电,如果需要充电系统负责在任务完成后将art自动下线,分配充电桩执行侧方位充电完成后自动恢复上线,继续参与水平运输作业;s10.当车辆完成当前作业任务且无后续计划任务时,水平运输控制系统负责结合后续作业计划和快速出勤的需求,按照区域优先级分配停车区域和停车位,并将art自动下线;s11.在对智能运输车辆进行全天候动态监管中,水平运输控制系统基于智能任务管理和智能远程驾驶模块实现车辆特殊工况和异常状态的及时管理和远程操控。
33.本发明实施例的智能水平运输系统,如图3所示,具有如下特点:1.持续优化升级:(1)在自有核心技术团队保障下,实现工艺创新和全过程设计;(2)持续更新和迭代系统架构,构建有持久生命力的软件生态;2.构建开放平台:(1)定义标准接口实现系统和运输车辆解耦设计,支持设备灵活选型,兼容不同运动学特征的运输车辆;(2)构建通用的物联网通讯底座,实现高质量实时通讯,支持高并发应用;3.微服务架构设计:(1)基于云底座技术开发,微服务及模块化设计,支持弹性扩容;(2)部署高性能微服务引擎,配合kubernetes容器管理及istio服务治理实现高并发计算;4.多重安全保障:(1)设计身份认证和安全鉴权证书管理,确保接入安全;(2)构建多层密钥体系,支持密钥全生命周期管理;(3)全方位监控及防御,实现泛攻击保护;(4)实时防护各类网络层、应用层的ddos攻击;(5)所有操作支持并实现访问控制及日志跟踪;5.系统灰度升级:(1)支持devops敏捷开发,灰度发布;(2)系统持续升级,支持高低版本集群独立运行;(3)保证系统、算法升级过程对作业无干扰,不影响已有的作业进展;6.平台化设计理念:(1)运用kpi统计分析平台,对水平运输业务关键指标实时监控分析;(2)部署告警监控平台,对业务作业的异常实时上报告警;(3)设计故障恢复模块,快速判断故障原因并处理,实现故障的事前预测、事中恢复、事后定位等;(4)实时采集系统日志,快速检索并分析关键信息,实现系统的健康检测及预防;(5)灵活配置网络及各项服务。
34.最后应当说明的是,上述实施例只是用于对本发明的举例和说明,而非意在将本发明限制于所描述的实施例范围内,此外本领域技术人员可以理解的是,本发明不局限于上述实施例,根据本发明教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1