一种安全带瑕疵检测差异判别方法
1.本发明涉及一种安全带瑕疵检测差异判别方法,属于瑕疵检测领域。
背景技术:
2.我国是纺织品生产和出口大国,纺织品质量把控尤为重要。汽车安全带作为常见的纺织品,在实际生活中应用十分广泛。从织物原料到纺织成品,安全带的生产要经历纺纱、染色等诸多环节,目前由于在此过程中多采用自动化设备织造,安全带容易出现边缘毛丝、表面滑丝、色点等多种瑕疵。在生产过程中,若未及时发现并检测到瑕疵,将会造成较大损失,严重影响企业效益。长期以来,安全带瑕疵检测主要依赖人工检测的方式,受主观因素的影响较大,速度慢,准确率较低。
3.而基于机器视觉的方式可以有效处理上述问题,能够快速、准确地识别安全带的瑕疵,避免出现较大的损失。
技术实现要素:
4.本发明的目的在于提出一种安全带瑕疵检测差异判别方法,可以有效的提高瑕疵识别的精度,解决现有技术中人工检测方式存在的受主观因素的影响较大、速度慢和准确率较低等问题。
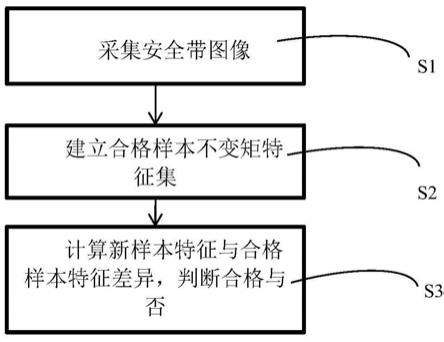
5.一种安全带瑕疵检测差异判别方法,所述安全带瑕疵检测差异判别方法包括以下步骤:
6.s1、采集传动带上安全带图像;
7.s2、基于采集到的安全带图像,筛选出合格样本,并建立合格样本不变矩特征集;
8.s3、计算新样本与合格样本的特征差异,判断是否存在瑕疵。
9.进一步的,s1具体为:采用工业相机连续采集传动带上的安全带原始图像,经灰度化处理后,提取固定区域图像获取roi区域。
10.进一步的,在s2中,所述筛选出合格样本,具体为:选择m幅合格的安全带图像,将选好的m幅合格的安全带图像按列分为d个子带进行检测,将每个子带进行二维小波分解,获取4组对应的小波熵特征,建立特征矩阵(m*d)
×
4,每行为一个子带样本,每列为小波熵特征值。
11.进一步的,在s2中,所述建立合格样本不变矩特征集,具体为:利用灰度共生矩阵提取安全带的纹理特征,计算共生矩阵能量、熵、相关性和倒数差分矩4个纹理参数,角度设置为0
°
、45
°
、90
°
和135
°
,计算各方向的均值和标准差共8维特征作为灰度共生矩阵特征。取图像上任意一点及偏离该点的另一点,设该点对的灰度值为(i,j),则能量特征e计算公式为:
[0012][0013]
熵特征ent计算公式为:
[0014][0015]
相关性c计算公式为:
[0016][0017]
倒数差分矩t计算公式为:
[0018][0019]
式中,p(i,j)为灰度值出现的概率,μ
x
,μ
y
为行、列方向均值,σ
x
,σ
y
为行、列方向标准差,κ=2。
[0020]
提取安全带的tamura的粗糙度和线性度特征。共建立标准参考子带(m*d)*14特征,特征矩阵中每一行为一个子带样本,每列为子带小波熵、灰度共生矩阵以及tamura特征矩共14维特征值,
[0021]
将特征矩阵按行等分为两个标准特征矩阵f1和f2,计算f1中第a个子带特征到f2中第b个子带特征的欧几里得距离d
a,b
,计算公式为:
[0022][0023]
式中,x
ai
(i=1,...,14)为f1中任一子带特征,y
bi
(i=1,...,14)为f2中任一子带特征,最后获得距离矩阵thd:
[0024][0025]
thd矩阵中按列表示f2中第b个样本与f1的所有样本的距离,根据标准图像f1和f2距离获得阈值参数th,按列取thd最大值后求均值,计算公式为:
[0026]
th=1.5*mean(max(thd,1))。
[0027]
进一步的,s3具体为:将待检测图像划分为d个子带图像,计算各子带小波熵、灰度共生矩阵以及tamura特征矩,进而获得与标准参考子带特征矩阵的距离;对于第i个子带,若距离所有的参考子带距离均大于阈值,则标记为异常结果,即出现瑕疵。
[0028]
本发明的有以下有益效果:本发明的一种安全带瑕疵检测差异判别方法,通过工业相机采集安全带图像,建立合格样本不变矩特征集,改进差异度判别方法。采用本发明的差异度判别方法,可以有效地检测出安全带的瑕疵,方法简单,检测精度高。本发明的检测方法适用于不同纹理的安全带瑕疵检测。
附图说明
[0029]
图1为本发明的一种安全带瑕疵检测差异判别方法的方法流程图;
[0030]
图2为采集的原始安全带图像;
[0031]
图3为预处理获取的roi区域;
[0032]
图4为子带图像。
具体实施方式
[0033]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
参照图1所示,本发明提出了一种安全带瑕疵检测差异判别方法的一实施例,所述安全带瑕疵检测差异判别方法包括以下步骤:
[0035]
s1、采集传动带上安全带图像;
[0036]
s2、基于采集到的安全带图像,筛选出合格样本,并建立合格样本不变矩特征集;
[0037]
s3、计算新样本与合格样本的特征差异,判断是否存在瑕疵。
[0038]
进一步的,在s1中,采用工业相机连续采集安全带原始图像,如图2所示,经灰度化处理后,提取固定区域图像获取roi区域,如图3所示。
[0039]
进一步地,在s2中,选择若干幅合格的安全带图像,本实施例中选择5幅。将图像按列分为d(本实施例中d=6)个子带进行检测,如图4所示,将每个子带进行二维小波分解,获取4组对应的小波熵特征,建立特征矩阵((5*6)
×
4,每行为一个子带样本,每列为小波熵特征值)。
[0040]
进一步地,在s2中,利用灰度共生矩阵提取安全带的纹理特征,计算共生矩阵能量、熵、相关性、倒数差分矩4个纹理参数,角度设置为0
°
、45
°
、90
°
和135
°
,计算各方向的均值和标准差共8维特征作为灰度共生矩阵特征。取图像上任意一点及偏离该点的另一点,设该点对的灰度值为(i,j),则能量特征e计算公式为:
[0041][0042]
熵特征ent计算公式为:
[0043][0044]
相关性c计算公式为:
[0045][0046]
倒数差分矩t计算公式为:
[0047]
[0048]
提取安全带的tamura的粗糙度和线性度特征。共建立标准参考子带30*14特征,特征矩阵中每一行为一个子带样本,每列为子带小波熵、灰度共生矩阵以及tamura特征矩共14维特征值。
[0049]
将特征矩阵按行等分为两个标准特征矩阵f1和f2,计算f1中第a个子带特征到f2中第b个子带特征的欧几里得距离d
a,b
,计算公式为:
[0050][0051]
式中,x
ai
(i=1,...,14)为f1中任一子带特征,y
bi
(i=1,...,14)为f2中任一子带特征,1≤a,b≤15。最后获得距离矩阵thd:
[0052][0053]
thd矩阵中按列表示f2中第b个样本与f1的所有样本的距离。根据标准图像f1和f2距离获得阈值参数th,按列取thd最大值后求均值,计算公式为:
[0054]
th=1.5*mean(max(thd,1))
[0055]
进一步地,在s3中,将待检测图像划分为d个子带图像,计算各子带小波熵、灰度共生矩阵以及tamura特征矩,进而获得与标准参考子带特征矩阵的距离;对于第i个子带,若距离所有的参考子带距离均大于阈值,则标记为异常结果,即出现瑕疵。
[0056]
本发明公开了安全带瑕疵检测差异判别方法,涉及图像处理技术领域,该方法包括:获取合格安全带样本图像,建立合格样本不变矩特征集,改进差异度判别方法;对输入的样本图像进行特征提取,将其与标准样本集中的所有数据比较,比较的结果均大于设置的阈值,即认定目标为瑕疵品。
[0057]
本发明通过工业相机采集安全带图像,建立合格样本不变矩特征集,改进差异度判别方法。采用本发明的差异度判别方法,可以有效的检测出安全带的瑕疵,方法简单,检测精度高。本发明的检测方法适用于不同纹理的安全带瑕疵检测。
[0058]
以上实施示例只是用于帮助理解本发明的方法及其核心思想,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1