一种基于多维指标的航空器遭遇尾流风险评估系统的制作方法
1.本发明涉及尾涡风险评价领域,特别涉及一种基于多维指标的航空器遭遇尾流风险评估系统。
背景技术:
2.尾涡是飞机产生升力的一种副产品,表现为在飞机后方卷起形成一对向外向下旋转的涡流,并在飞机后方持续几分钟时间。尾涡的强度由产生尾涡的飞机重量、飞行速度机翼形状和翼展长度所决定,其中最主要的是飞机的重量。尾涡强度随飞机重量、载荷因数的增加和飞行速度的减小而增大。参照图1,处在另一架飞机尾涡区域内的飞机可能会造成空气动力学紊乱,可能无法通过自身的控制来恢复姿态,进一步出现下沉、发动机停止运转以及严重的滚转,造成乘客人身安全问题和飞机的损害。
3.在尾涡遭遇的安全性评估方面,carsten等对飞机遭遇严重性评估研究中采用了气动响应模型的方法。gerben等人用尾涡诱导力矩和飞机滚转阻尼力矩的大小来反映飞机遭遇尾涡后的滚转运动。campos提出通过建立有关力矩模型来模拟飞机在尾涡影响下的滚转状况,并以最大滚转角速度作为评估风险的指标。visscher提出了诱导力矩系数这一衡量指标,用来评估飞机在遭遇尾涡后的严重性。欧洲空中航行安全组织提出了一项名为“recat
‑
eu”的提案,它包括对国际民航组织目前关于进近和起飞的尾流安全间隔最小值规定的修订。冯志勇分析了特定天气条件下、一定时间间隔后残存尾涡的强度和后机能承受的尾涡强度进行比较,引入滚转比例系数对遭遇强度进行评估。
技术实现要素:
4.目前尚缺乏一种量化评估后机遭遇尾涡危险风险的方法,因此本发明提供一种基于多维指标的航空器遭遇尾流风险评估系统。
5.为了实现上述发明目的,本发明提供了以下技术方案:
6.一种基于多维指标的航空器遭遇尾流风险评估系统,所述系统用于执行以下步骤:
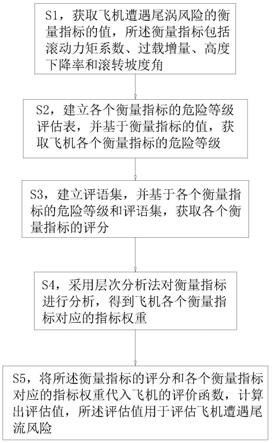
7.s1,获取飞机遭遇尾涡风险的衡量指标的值,所述衡量指标包括滚动力矩系数、过载增量、高度下降率和滚转坡度角;
8.s2,建立各个衡量指标的危险等级评估表,并基于衡量指标的值,获取飞机各个衡量指标的危险等级;
9.s3,建立评语集,并基于各个衡量指标的危险等级和评语集,获取各个衡量指标的评分;所述评语集包括1、2、3、4、5五个危险等级,分别对应2、4、6、8、10五个评分;
10.s4,采用层次分析法对衡量指标进行分析,得到飞机各个衡量指标对应的指标权重;
11.s5,将所述衡量指标的评分和各个衡量指标对应的指标权重代入飞机的评价函数,计算出评估值,所述评估值用于评估飞机遭遇尾流风险。
12.通过采用上述技术方案,通过选取滚转力矩系数、过载增量、高度下降率和滚转角速度四个衡量指标来评价飞机遭遇尾涡风险。首先利用层次分析法建立航空器遭遇尾流风险评价指标体系,获取衡量指标的指标权重。获取衡量指标的值,并基于衡量指标和指标权重构建评价函数,对航空器遭遇前机尾流的风险进行评估。该方法可以实时动态地监视不同航段上航空器遭遇尾流风险态势,并对避免尾流危险遭遇,提高进近阶段运行安全,协助管制员实时决策提供了参考。
13.可选地,步骤s5中,评估值用于评估飞机遭遇尾流风险具体为判断评估值对应的危险程度;
14.若评估值小于2,则其危险程度为安全;
15.若评估值大于等于2小于4,则其危险程度为较为安全;
16.若评估值大于等于4小于6,则其危险程度为轻度危险;
17.若评估值大于等于6小于8,则其危险程度为中度危险;
18.若评估值大于等于8小于10,则其危险程度为强烈危险。
19.可选地,在获取飞机的滚动力矩系数时,将飞机机翼分割为条带状,形成多个微元机翼,再计算滚动力矩系数;所述计算飞机的滚动力矩系数采用下述公式计算,
[0020][0021]
l
r
=l
×
f;
[0022]
式中,rmc为滚转力矩系数,v为空气的来流速度;s为机翼面积,b为前机翼展;f为机翼上其中一个微元机翼升力的变化量,l
r
为该微元机翼受诱导力矩大小,l为该微元机翼到机翼中心处的距离。
[0023]
可选地,所述过载增量采用下述公式计算,
[0024][0025]
式中,f
all
为飞机所受合力,m为飞机重量,g为重力加速度;其中,
[0026]
f
all
=δf
wing
+δf
tail
+δf
engine
+δf
fuselage
;
[0027]
式中,δf
wing
为机翼升力变化量;δf
tail
为尾翼升力变化量;δf
engine
为发动机升力变化量;δf
fuselage
为机身升力变化量。
[0028]
可选地,所述高度下降率采用下述公式计算,
[0029][0030]
其中,g
r
为高度下降率,δh为高度变化量;
[0031][0032]
式中,t
m
为飞行员反应时间;t
n
为航空器响应时间,m为飞机重量,f
all
为飞机所受合力。
[0033]
可选地,计算滚转坡度角时,采用滚转角速度计算公式计算滚转角速度,再对所述滚转角速度进行积分,得到滚转坡度角,所述滚转角速度计算公式为:
[0034][0035][0036][0037]
式中,为滚转角速度,w
rp
为滚转阻尼力矩系数;w
rc
为滚转操纵力矩系数;h(t
′‑
t
″
)为单位阶跃函数;t
′
为遭遇尾涡时间,t
″
为飞行员与飞机反应时间;a为展弦比;i为飞机转动惯量,通过无量纲回转半径来估算飞机相对于中心惯性主轴的惯性矩。
[0038]
可选地,步骤s4具体包括以下步骤,
[0039]
101,根据所述衡量指标构建四阶判断矩阵;
[0040]
102,对所述四阶判断矩阵进行一致性检验;当一致性检验的结果时,判断矩阵通过一致性检验,则执行步骤103;
[0041]
103,基于判断矩阵,采用均方根法计算指标权重。
[0042]
可选地,所述一致性检验采用下述公式,
[0043][0044][0045]
式中,ci为判断矩阵的一致性判断指标;λ
max
为判断矩阵的最大特征值;n为判断矩阵的阶数。
[0046]
可选地,所述均方根法采用下述公式,
[0047][0048]
式中,a
ij
为判断矩阵中的i行、j列的元素。
[0049]
可选地,所述评价函数采用线性加权法,所述线性加权法采用如下公式,
[0050][0051]
式中,z为评估值;c(a
i
)为飞机各衡量指标的评分;ω
i
为各个衡量指标对应的指标权重。
[0052]
与现有技术相比,本发明的有益效果:通过选取滚转力矩系数、过载增量、高度下降率和滚转角速度四个衡量指标来评价飞机遭遇尾涡风险。首先利用层次分析法建立航空器遭遇尾流风险评价指标体系,获取衡量指标的指标权重。获取衡量指标的值,并基于衡量指标和指标权重构建评价函数,对不同翼型的航空器遭遇前机尾流的风险进行评估。该方法可以实时动态地监视不同航段上航空器遭遇尾流风险态势,并对避免尾流危险遭遇,提高进近阶段运行安全,协助管制员实时决策提供了参考。
附图说明:
[0053]
图1为本发明中飞机尾涡遭遇示意图;
[0054]
图2为本发明的方法流程图;
[0055]
图3为本发明中条状带模型示意图;
[0056]
图4为本发明中条状带模型部分示意图。
具体实施方式
[0057]
下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
[0058]
实施例1
[0059]
一种基于多维指标的航空器遭遇尾流风险评估系统,参照图1,系统用于执行下述步骤,
[0060]
s1,获取飞机遭遇尾涡风险的衡量指标的值,衡量指标包括滚动力矩系数、过载增量、高度下降率和滚转坡度角。
[0061]
求取衡量指标的值之前,需要先判断飞机类型,飞机类型包括圆翼飞机和后掠翼飞机;飞机的机型不同,则在评估飞机遭遇尾流风险时的评估过程也不一致,在本实施例中,主要是体现在衡量指标的数据不同。
[0062]
在获取飞机的滚动力矩系数时,将飞机机翼分割为条带状,形成多个微元机翼,再计算滚动力矩系数;计算飞机的滚动力矩系数采用下述公式,
[0063][0064]
l
r
=l
×
f;
[0065]
其中,rmc为滚转力矩系数,v为空气的来流速度,与飞机的飞行速度一致;s为机翼面积,b为前机翼展;f为机翼上某个微元机翼升力的变化量,l
r
为该微元机翼受诱导力矩大小,l为该微元机翼到机翼中心处的距离。
[0066]
在计算滚转力矩系数时,由于机翼各处受力不均,因此可以采用微元思想,将机翼分割成无数条状带,将每条条带状受力当成一个整体,之后按机翼展展长方向进行积分,即可以得到机翼整体的升力变化量。条状带模型图如图3和图4所示,每条条带状上升力变化量乘以其到相应机翼中心的距离,即为后机机翼该条状带区域在前机尾涡诱导作用下的诱导滚转力矩,之后进行累加,即为机翼整体的滚转力矩。
[0067]
由条状带法思想,我们计算一个条带上由尾涡引起的升力变化量,进而得到此条带上的诱导力矩。
[0068][0069][0070]
式中,df(y)表示为局部的升力变化量;δl
r
为局部诱导力矩;ρ为尾涡所处位置的空气密度;v为来流速度;cl(y)为飞机处理y位置处的有效升力线系数;c(y)为弦长;δα(y)
表示迎角变化量。
[0071]
针对两种飞机类型;椭圆形翼弦弦长cl(y)采用下述公式计算:
[0072][0073]
后掠翼飞机翼弦弦长cl(y)采用下述公式计算:
[0074][0075][0076]
式中,c
r
为翼根处的弦长;λ为梢根比。
[0077]
因此,椭圆形翼弦飞机的滚转力矩系数为:
[0078][0079]
后掠翼飞机飞机的滚转力矩系数为:
[0080][0081]
尾涡的强度大小用环量加以衡量,其中,
[0082][0083][0084]
r
c
=0.052b0;
[0085][0086][0087]
式中,γ0为尾涡刚从机翼后缘脱落时的环量大小,即初始环量;b0为初始涡核间距;r
c
为初始涡核半径;m为前机质量大;b为前机翼展;ρ为尾涡所处位置的空气密度;g为重力加速度;v1为前机真空速;ω0为特征速度;t0为参考时间,即尾涡在相互诱导的初始下降速度即以特征速度ω0下降距离b0所需时间。
[0088]
尾涡耗散速度的快慢与湍流耗散率有关,t
c
为近场尾涡的持续时间,根据sarpkaya公式t
c
与无因次尾涡耗散率ε
*
之间的关系,如下式:
[0089]
[0090]
又有,
[0091]
当ε
*
≥0.2535时,
[0092][0093]
当0.0235≥ε
*
≥0.0121时,
[0094][0095]
当0.0121≥ε
*
≥0.001时,
[0096]
t
c
=9.18t0‑
180t0ε
*
;
[0097]
当0.001≥ε
*
≥时,
[0098]
t
c
=9t0;
[0099]
尾涡在经过卷起,形成两个方向涡流后,出现线性不稳定,涡量开始径向扩散,之后不稳定性导致两个涡流之间的强烈相互作用,最终崩溃耗散成大气中湍流。把耗散过程分为两个阶段,即扩散阶段和快速衰减阶段;
[0100]
扩散阶段耗散公式如下:
[0101][0102]
快速快速衰减阶段公式如下:
[0103][0104]
且前机产生的尾涡会对后机产生一个诱导速度,根据burnham
‑
hallock模型,可得诱导速度采用下式计算:
[0105][0106]
式中,γ为尾涡经过一定时间耗散之后的环量,r为该点到涡心处的距离,v为该点的垂直诱导速度。
[0107]
前机产生的尾涡在后机机翼上每一点的切向速度都不相同,因此每一点的升力变化量也不相同。当后机从前机尾涡场产生的两涡之间任意一点位置进入时,由于左右机翼受力不均,会以两翼中点为中心产生一个诱导滚转力矩,使飞机发生滚转,严重影响飞行安全。
[0108]
在icao标准中,采用滚转力矩系数这一无量纲化参数去比较具有不同物理和空气动力学特性的飞机之间遭遇尾涡的严重性程度,当滚转力矩系数在起飞与进近阶段小于0.04时、平飞阶段小于0.06时,可认为飞机安全。
[0109]
在求过载增量时,采用下述公式,
[0110]
[0111]
式中,f
all
为飞机所受合力,m为飞机重量,g为重力加速度;其中,
[0112]
f
all
=δf
wing
+δf
tail
+δf
engine
+δf
fuselage
;
[0113]
式中,δf
wing
为机翼升力变化量;δf
tail
为尾翼升力变化量;δf
engine
为发动机升力变化量;δf
fuselage
为机身升力变化量;其中,
[0114][0115]
式中,ρ为大气密度,v为来流速度,即飞机真空速;cl(y)为升力线斜率;c(y)为飞机翼展长坐标处的翼弦长;v
z
(y)为前机尾涡在后机机翼上诱导产生的上洗或下洗速度;
[0116][0117]
式中,s(y)为尾翼弦长;c为尾翼展长;
[0118][0119]
式中,b(y)为发动机翼弦长;d为发动机展长;
[0120]
δf
fuselage
=ncosα
‑
asinα;
[0121][0122][0123][0124]
式中,n为法向力,a为轴向力;α为迎角。
[0125]
在求高度下降率时,采用下述公式计算;
[0126][0127]
其中,g
r
为高度下降率,δh为高度变化量;
[0128][0129]
式中,t
m
为飞行员反应时间;t
n
为航空器响应时间。
[0130]
计算滚转坡度角时,首先采用下述公式计算滚转角速度,
[0131][0132][0133][0134]
式中,为滚转角速度,w
rp
为滚转阻尼力矩系数,取值为
‑
0.5;w
rc
为滚转操纵力矩
系数;h(t
′‑
t
″
)为单位阶跃函数;t
′
为遭遇尾涡时间,t
″
为飞行员与飞机反应时间;a为展弦比;i为飞机转动惯量,通过无量纲回转半径来估算飞机相对于中心惯性主轴的惯性矩;
[0135]
i采用下式计算:
[0136][0137]
式中,为无量纲回转半径,与发动机的类别和飞机构型有关,从下表获取:
[0138][0139]
可以得出,椭圆形翼弦的飞机,其滚转角速度计算公式如下:
[0140][0141]
后掠翼飞机,其滚转角速度计算公式如下:
[0142][0143]
再对滚转角速度进行积分,得到滚转坡度角。
[0144]
对于椭圆形翼弦的飞机,其滚转坡度角计算公式如下:
[0145][0146]
对于椭圆形翼弦的飞机,其滚转坡度角计算公式如下:
[0147][0148]
s2,建立各个衡量指标的危险等级评估表,并基于衡量指标的值,获取飞机各个衡量指标的危险等级。
[0149]
其中,滚动力矩系数、过载增量、高度下降率和滚转角速度的危险等级评估表如下所示,危险等级评估表基于衡量指标的干扰强度划分各个衡量指标的危险等级,危险等级包括1、2、3、4、5五个等级。
[0150]
其中,滚动力矩系数干扰强度对应的危险等级评估如下表所示:
[0151]
干扰强度滚转力矩系数危险等级
无干扰rmc≤0.021轻度干扰0.02≤rmc≤0.042较大干扰0.04≤rmc≤0.083强烈干扰0.08≤rmc≤0.14剧烈干扰0.1≤rmc5
[0152]
过载增量颠簸强度对应的危险等级评估如下表所示:
[0153]
颠簸强度过载增量危险等级无湍流δn≤0.151轻度颠簸0.15≤δn≤0.52中度颠簸0.5≤δn≤0.83较大颠簸0.8≤δn≤14强烈颠簸1≤δn5
[0154]
高度下降率干扰强度对应的危险等级评估如下表所示:
[0155][0156][0157]
滚转坡度角干扰强度对应的危险等级评估如下表所示:
[0158]
干扰强度坡度角危险等级无安全影响φ<10
°
1轻度影响10
°
≤φ<25
°
2较大影响25
°
≤φ<30
°
3存在危险30
°
≤φ<45
°
4强烈危险45
°
≤φ5
[0159]
s3,建立评语集,并基于各个衡量指标的危险等级和评语集,获取各个衡量指标的评分;评语集包括1、2、3、4、5五个危险等级,分别对应2、4、6、8、10五个评分。
[0160]
如下表所示:
[0161]
危险等级对应评分12243648510
[0162]
s4,采用层次分析法对衡量指标进行分析,得到飞机各个衡量指标对应的指标权重。
[0163]
层次分析法包括下述步骤,
[0164]
101,根据衡量指标构建四阶判断矩阵;
[0165]
对航空器遭遇尾流风险指标体系中相关因素指标的相对重要性进行两两比较判断,构造判断矩阵,采用t.l.saaty建议的1~9标度法。
[0166]
标度表如下:
[0167][0168]
准则层包括滚转力矩系数(a1)、过载增量(a2)、高度下降率(a3)、滚转坡度角(a4)四个子项,得到四阶判断矩阵如下。
[0169][0170]
其中,a
ij
表示元素a
i
和a
j
两两相比得到的数值。
[0171]
102,对四阶判断矩阵进行一致性检验;当一致性检验的结果时,判断矩阵通过一致性检验,则执行步骤103;
[0172]
在建立判断矩阵时,由于客观事物具有复杂性,主题认识具有主观性和多样性,判断矩阵不可能具有完全一致性,因此需要进行判断矩阵的一致性检验。
[0173]
一致性检验采用下述公式,
[0174][0175][0176]
式中,ci为判断矩阵的一致性判断指标;λ
max
为判断矩阵的最大特征值;n为判断矩阵的阶数。
[0177]
且当判断矩阵的阶数较大时,则引入随机一致性指标ri(random index)进行修正,经修正的一致性指标用cr表示。
[0178][0179]
式中,ri取值参照下表,n为判断矩阵的阶数。
[0180]
n12345678910ri000.580.901.121.241.321.411.451.49
[0181]
当求出的结果cr<0.1时,判断矩阵通过一致性检验。
[0182]
103,基于判断矩阵,采用均方根法计算指标权重。
[0183]
均方根法计算指标权重采用如下公式,
[0184]
[0185]
式中,a
ij
为判断矩阵中的i行、j列的元素。
[0186]
得出四个评价指标所对应的指标权重ω1、ω2、ω3、ω4。
[0187]
s5,将衡量指标的评分和各个衡量指标对应的指标权重代入飞机的评价函数,计算出评估值,评估值用于评估飞机遭遇尾流风险。
[0188]
本实施例中,采用线性加权法构建评价函数,线性加权法如以下公式,
[0189][0190]
式中,z为评估值;c(a
i
)为衡量指标的危险等级评分;ω
i
为衡量指标的指标权重。
[0191]
分别代入两种类型飞机衡量指标的值,得到两种类型飞机的评价函数。
[0192]
后机与前机的相对位置可由三维坐标系(x,y,z)来表示,后机在前机尾涡影响范围内的任意位置处风险均要考虑滚转力矩系数(rmc)、过载增量(|δn|)、高度下降率(gr)和滚转角加速度(φ)这四种衡量航空器危险程度的指标。
[0193]
根据民用航空器分为圆翼和后掠翼飞机,可设计评价函数为:
[0194]
z=ω1c(rmc)+ω2c(δn)+ω3c(gr)+ω4c(φ)。
[0195]
求取评估值后,将评估值用于评估飞机遭遇尾流风险,判断评估值对应的危险程度;
[0196]
若评估值小于2,则其危险程度为安全;
[0197]
若评估值大于等于2小于4,则其危险程度为较为安全;
[0198]
若评估值大于等于4小于6,则其危险程度为轻度危险;
[0199]
若评估值大于等于6小于8,则其危险程度为中度危险;
[0200]
若评估值大于等于8小于10,则其危险程度为强烈危险。
[0201]
如下表所示,
[0202]
危险程度评价函数分值危险等级安全z<21较为安全2≤z<42轻度危险4≤z<63中度危险6≤z<84强烈危险8≤z<105
[0203]
通过查阅上表,工作人员能够根据求取的评估值来实时动态地监视不同航段上航空器遭遇尾流风险态势,并对避免尾流危险遭遇,提高进近阶段运行安全,为协助管制员实时决策提供参考。
[0204]
两种类型飞机中,四个衡量指标的计算公式不同,则其评价函数也不一致,分别构建评价函数后;能够使用评价函数来将滚转力矩系数、过载增量、高度下降率和滚转坡度角四个衡量指标对航空器遭遇尾流风险进行综合评价,对不同翼型的航空器遭遇前机尾流的风险进行评估。
[0205]
实施例2
[0206]
在本实施例中,选取国产arj21(中型机)飞机跟随a330
‑
200(重型机)飞机对实施例1中所述的方法进行验证,icao规定近地阶段中型机跟随重型机时尾流安全间隔为9.3km。本实施例选取进近阶段时后机穿越前机尾涡流场的三个位置:
[0207]
1)飞机纵向穿越单涡涡核中心,图1中b位置;
[0208]
2)飞机纵向穿越距两涡核连线中点处左右各10m处位置;
[0209]
3)穿越两涡涡核连线中点处。
[0210]
选取以上三个位置来判断飞机此时遭遇尾流的风险程度,判断icao间隔标准是否安全。
[0211]
其中,arj21参数与a330
‑
200参数如下表所示:
[0212][0213]
尾流及环境参数如下表所示:.
[0214][0215]
将上述参数带入到实施例1中得到的评价参数公式中,能够计算得到如下表所示的计算结果:
[0216][0217][0218]
再带入到危险等级划分表中,得到衡量指标的得分结果如下表所示:
[0219][0220]
再根据,层次分析法得出ω1=ω2=ω3=ω4,四种情况同样重要。
[0221]
因此对于纵向穿越单涡涡核中心这种情况:
[0222]
可以得到,评价函数为:
[0223]
z=0.25
×
1.642+0.25
×
0.06+0.25
×
0.742+0.25
×
1.42;
[0224]
z=0.966;
[0225]
对于纵向穿越两涡涡核连线中心这种情况:
[0226]
z=0.25
×
0+0.25
×
0.248+0.25
×
0.309+0.25
×
0;
[0227]
z=0.140;
[0228]
对于纵向穿越两涡连线中心左右各10m处的这种情况:z=0.25
×
0.295+0.25
×
0.32+0.25
×
0.394+0.25
×
0.54;
[0229]
z=0.387;
[0230]
根据上述计算结果,可见在icao间隔为9.3km时,三种不同的后机穿越前机尾涡流场的穿越方式模糊综合评价得分均小于2,评估为安全。三种方式比较来看,穿越两涡涡核连线中心这种方式最安全,其次是穿越两涡连线中心左右各10m处;穿越单涡涡核中心这种情况危险等级高于以上两种情况。根据上述结论,本评估系统能够为管制员实时决策提供参考。
[0231]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1