一种基于高分遥感图像的水田面积提取方法及装置与流程
1.本发明主要涉及土地监测技术领域,具体涉及到一种基于高分遥感图像的水田面积提取方法及装置。
背景技术:
2.监测水田的变化是估算水稻产量的必要路径,也是评估“垦造水田”等土地整治工程实施成效的重要手段,而遥感技术具有快速、高效和客观的优点,成为水田监测的主要途径;
3.目前的水田监测技术,中低分辨率的遥感影像的监测精度低,辨识能力差,采用高分2号(gf-2)的遥感图像和哨兵2号(sentinel-2)的遥感图像,多波段的高分辨率遥感影像的单一指数或者少量指数,对地物的区分不灵敏,高分辨率遥感影像能清晰地刻画地物细节,但多特征图像,产生高维的数据,数据量大,计算耗时。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,本发明提供了一种基于高分遥感图像的水田面积提取方法及装置,所述方法收集高分2号和哨兵2号的遥感图像,并通过差值分析得出多个时相差异最大的指数图像,来区分水田与其他耕地,提高水田识别的灵敏度,对联合了多特征的图像进行主成分分析,然后利用随机森林等方法对水田进行提取,以减少数据量并提高计算速度,实现对水田精确识别。
5.本发明提供了一种基于高分遥感图像的水田面积提取方法,所述提取方法包括:
6.采集水稻生长期的遥感图像,获得第一遥感图像,采集水稻收割后的遥感图像,获得第二遥感图像,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像;
7.对所述第一遥感图像和所述第二遥感图像进行预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像;
8.将预处理后的第一遥感图像和预处理后的第二遥感图像进行时序多特征差异图像分析,获得时序多特征差异图像;
9.利用随机森林算法对所述时序多特征差异图像进行解译,并对解译结果进行精度评估,提取水田信息,统计水田面积。
10.进一步的,所述对所述第一遥感图像和所述第二遥感图像进行预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像,包括:
11.将所述第一遥感图像和所述第二遥感图像依次进行辐射校正、大气校正、正射校正、重采样、几何配准和图像归一化的预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像。
12.进一步的,所述将预处理后的第一遥感图像和预处理后的第二遥感图像进行时序多特征差异图像分析,获得时序多特征差异图像,包括:
13.提取所述预处理后的第一遥感图像的第一gf-2遥感图像,提取所述预处理后的第二遥感图像的第二gf-2遥感图像;
14.将所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像进行差值分析和多尺度分析,获得gf-2分析数据;
15.提取所述预处理后的第一遥感图像的第一sentinel-2遥感图像,提取所述预处理后的第二遥感图像的第二sentinel-2遥感图像;
16.对所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行指数分析和差值分析,得到sentinel-2分析数据;
17.基于所述gf-2分析数据和所述sentinel-2分析数据,构建时序多特征差异图像。
18.进一步的,将所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像进行差值分析和多尺度分析,获得gf-2分析数据,包括:
19.将所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像进行差值分析,获得gf-2差值图像;
20.将所述gf-2差值图像进行多尺度分析,获得gf-2多尺度分析图像。
21.进一步的,所述指数分析包括归一化植被指数分析、归一化红外指数分析、归一化湿度指数分析、红边植被指数分析、红边拐点指数分析、亮度指数分析和颜色指数分析。
22.进一步的,所述对所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行指数分析和差值分析,得到sentinel-2分析数据,包括:
23.对所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行指数分析,获得指数分析数据;
24.提取所述指数分析数据的水田样本最大值图像和水田样本最小值图像;
25.将所述水田样本最大值图像和所述水田样本最小值图像进行差值处理和多尺度分析,获得时序指数差值图像。
26.进一步的,所述基于所述gf-2分析数据和所述sentinel-2分析数据,构建时序多特征差异图像,包括:
27.将所述gf-2分析数据和所述sentinel-2分析数据进行叠置分析,获得多特征差异分析数据,基于所述多特征差异分析数据构建时序多特征差异图像。
28.进一步的,所述将所述gf-2分析数据和所述sentinel-2分析数据进行叠置分析,获得多特征差异分析数据,基于所述多特征差异分析数据构建时序多特征差异图像,包括:
29.取所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像差值分析的结果,以及所述sentinel-2分析数据进行主成分分析,获得主成分数据;
30.取所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像多尺度分析的结果,联合所述主成分数据,构建时序多特征差异图像。
31.进一步的,所述取预处理后的第一gf-2遥感图像和预处理后的第二gf-2遥感图像差值分析的结果,以及所述sentinel-2分析数据进行主成分分析,获得主成分数据,包括:
32.取所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像差值分析的结果,进行主成分分析,取第一个主成分量;
33.取所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像的差值分析的结果,进行主成分分析,取前两个主成分量;
34.取所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像的差值分析结果,进行主成分分析,取前三个主成分量。本发明还提供了一种基于高分遥感图像的水田面积提取装置,所述装置包括:
35.数据采集模块:采集水稻生长期的遥感图像,获得第一遥感图像,采集水稻收割后的遥感图像,获得第二遥感图像,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像;
36.预处理模块:对所述第一遥感图像和所述第二遥感图像进行预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像;
37.图像分析模块:将预处理后的第一遥感图像和预处理后的第二遥感图像进行时序多特征差异图像分析,获得时序多特征差异图像;
38.统计分析模块:利用随机森林算法对所述时序多特征差异图像进行解译,并对解译结果进行精度评估,提取水田信息,统计水田面积。
39.本发明提供了一种基于高分遥感图像的水田面积提取方法及装置,所述方法采用高分辨率的遥感影像技术,并通过差值分析得出多个时相差异最大的指数图像,来区分水田与其他耕地,提高水田识别的灵敏度,对联合了多特征的图像进行主成分分析,然后利用随机森林等方法对水田进行提取,以减少数据量并提高计算速度,实现对水田精确识别。
附图说明
40.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
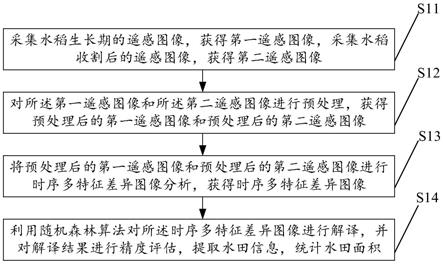
41.图1为本发明实施例中基于高分遥感时序多特征差异水田提取方法流程图;
42.图2为本发明实施例中晚稻生长期多尺度分析后的gf-2遥感图像;
43.图3为本发明实施例中晚稻收割后多尺度分析后的gf-2遥感图像;
44.图4为本发明实施例中基于高分遥感图像的水田面积提取装置示意图。
具体实施方式
45.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
46.实施例一:
47.图1示出了本发明实施例中基于高分遥感图像的水田面积提取方法流程图,本发明提供的基于高分遥感图像的水田提取方法,包括:
48.s11:采集水稻生长期的遥感图像,获得第一遥感图像,采集水稻收割后的遥感图像,获得第二遥感图像,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像。具体的,对广东省粤北地区南雄市的晚稻生长的水田面积进行提取,获取gf-2和sentinel-2的遥感数
据,并对遥感数据进行预处理,根据水稻的时序特征差异进行水田的识别,结合水稻的生长期和收割期,水田在遥感图像中的差异最明显,采集水稻生长期的遥感图像,获得第一遥感图像以及采集水稻收割后的遥感图像,获得第二遥感图像,使得水田特征在所述第一遥感图像和所述第二遥感图像中的差异明显,有利于提高水田识别的精度。
49.进一步的,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像。sentinel-2遥感图像的幅宽为290km,适用于市域尺度和省域尺度的遥感应用,而结合gf-2高分辨率卫星影像,可以提高水田识别的精确程度。
50.进一步的,为了提高遥感图像水田识别精度,在水稻的生长期和收割期的遥感图像,选择少云或者无云的遥感图像。
51.s12:对所述第一遥感图像和所述第二遥感图像进行预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像。
52.具体的,所述预处理包括将所述第一遥感图像和所述第二遥感图像进行辐射校正、大气校正、正射校正、重采样、几何配准和图像归一化的预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像。所述预处理后的第一遥感图像和预处理后的第二遥感图像,能够反映地物的真实反射率,不同遥感影像上同一地点的坐标一致,同一地物的反射率值相近,通过主成分分析将信息集中在1到2个特征波段上。
53.s13:将预处理后的第一遥感图像和预处理后的第二遥感图像进行时序多特征差异图像分析,获得时序多特征差异图像。
54.具体的,提取所述预处理后的第一遥感图像的第一gf-2遥感图像,提取所述预处理后的第二遥感图像的第二gf-2图像,对所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像进行差值处理,得到第一gf-2差值图像,对所述第一gf-2差图像进行多尺度分析,获得第二gf-2差值图像。
55.具体的,所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像的地物边界特征明显,在水稻收割后的图像中,地物的边界特征更清晰,通过差值处理和多尺度分析,进一步的减少所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像的异物同谱的影响,提高水田边界的提取精度。
56.具体的,图2示出了本发明实施例中晚稻生长期多尺度分析后的gf-2遥感图像,图3示出了本发明实施例中晚稻收割后多尺度分析后的gf-2遥感图像,所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像经过多尺度分析后,减少了异物同谱的影响,提高水田边界的提取精度。
57.具体的,提取所述预处理后的第一遥感图像的第一sentinel-2遥感图像,提取所述预处理后的第二遥感图像的第二sentinel-2遥感图像,对所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行指数分析,获得指数分析图像。
58.进一步的,所述指数分析包括归一化植被指数分析、归一化红外指数分析、归一化湿度指数分析、红边植被指数分析、红边拐点指数分析、亮度指数分析和颜色指数分析;
59.所述归一化植被指数由公式得:
[0060][0061]
其中:ndvi为归一化植被指数,b
nir
为影像的红外波段,b
red
为影像红波段;
[0062]
所述归一化红外指数由公式得:
[0063][0064]
其中:ndii为归一化红外指数,b
nir
为影像的红外波段,b
swir1
为影像短波红外波段;
[0065]
所述归一化湿度指数由公式得:
[0066][0067]
其中:ndmi为归一化湿度指数,b
nir
为影像的红外波段,b
green
为影像绿波段。
[0068]
所述红边植被指数由公式得:
[0069][0070]
其中:vog为红边植被指数,b
re1
为影像的植被红边波段1,b
re2
为影像的植被红边波段2;
[0071]
所述红边拐点指数由公式得:
[0072][0073]
其中:reip为红外拐点指数,b
re1
为影像的植被红边波段1,b
re2
为影像的植被红边波段2,b
re3
为影像的植被红边波段3。
[0074]
所述亮度指数由公式得:
[0075][0076]
其中:bi为亮度指数,b
red
为影像的红边波段,b
green
为影像绿波段;所述颜色指数由公式得:
[0077][0078]
其中:ci为颜色指数,b
red
为影像的红波段,b
green
为影像绿波段。
[0079]
进一步的,通过比较水稻生长期和收割后的各个指数图像,在所述指数分析图像中提取水田样本最大值图像和水田样本最小值图像,将所述水田样本最大值图像和所述水田样本最小值图像进行差值处理和多尺度分析,获得时序指数差值图像。具体的,将所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行差值处理,获得sentinel-2差值图像。
[0080]
对所述第一gf-2差值图像、所述sentinel-2差值图像以及所述时序指数差值图像进行主成分分析,提取主成分数据,包括:
[0081]
对所述第一gf-2差值图像进行主成分分析,取第一个主成分分量;
[0082]
对所述sentinel-2差值图像进行主成分分析,取前两个主成分分量;
[0083]
对所述时序指数差值图像进行主成分分析,取前三个主成分分量。
[0084]
将所述主成分数据联合所述第二gf-2差值图像,构建时序多特征差异图像,使得参与水田提取的图像,具备水田边界精确提取的能力和较高的识别的灵敏度,能够准确的与其他农用地区分。
[0085]
进一步的,在所述第一遥感图像和所述第二遥感图像上建立识别水田的训练样本,包括水田、林地、其他农用地、裸地、人工地表和水域。结合经验进行目视判别,在不同影像上建立统一的训练样本,并进行样本的可分离性分析,保证同一位置的样本在不同影像上表达的地物相同,训练样本最优。
[0086]
结合所述时序多特征差异图像、所述时序指数差值图像、所述第一遥感图像和所述第二遥感图像分析训练样本的可分离性,通过所述训练样本在各个图像中的可分离性对比,检验所述时序多特征差异图像的水田识别精度。
[0087]
具体的,所述训练样本在各个图像中的可分离性对比结果如表1:
[0088]
表1不同图像上的训练样本的可分离性
[0089][0090]
由表1可得所述训练样本在所述时序多特征差异图像中的可分离性高,水田提取的精确度高。
[0091]
s14:利用随机森林算法对所述时序多特征差异图像进行解译,并对解译结果进行精度评估,提取水田信息,统计水田面积。
[0092]
进一步的,随机森林算法是一种集成学习算法,能够将多棵决策树集成的一种算法,用于处理高维数据且运行速度快,对于较少的特征样本也有较高的分类精度。
[0093]
具体的,利用随机森林算法分别对生长期的影像、收割后的影像、时序指数差值图像和时序多特征差异图像进行分类,提取水田的面积,并以实地分类样本检验分类精度和面积的准确程度,比较不同图像的精度,得到的精度评估结果如表2所示:
[0094]
表2不同类型图像精度评估
[0095][0096][0097]
由表2可以发现时序多特征差异图像的水田提取精度最高,kappa系数为0.97,用户精度为98%,水田面积与农业部门统计的晚稻播种数据差值为240.05hm2,即所述时序多特征差异图像的精准度高,满足水田面积提取要求。
[0098]
本发明实施例提供了一种基于高分遥感图像的水田面积提取方法,所述采用高分辨率的遥感影像技术,并通过差值分析得出多个时相差异最大的指数图像,来区分水田与其他耕地,提高水田识别的灵敏度,对联合了多特征的图像进行主成分分析,然后利用随机森林算法对水田进行提取,以减少数据量并提高计算速度,实现对水田精确识别。
[0099]
实施例二:
[0100]
图4示出了本发明实施例中基于高分遥感图像的水田面积提取装置示意图,所述装置包括:
[0101]
数据采集模块1:采集水稻生长期的遥感图像,获得第一遥感图像,采集水稻收割后的遥感图像,获得第二遥感图像,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像;
[0102]
具体的,根据水稻的时序特征差异进行水田的识别,结合水稻的生长期和收割期,水田在遥感图像中的差异最明显,采集水稻生长期的遥感图像,获得第一遥感图像以及采集水稻收割后的遥感图像,获得第二遥感图像,使得水田特征在所述第一遥感图像和所述第二遥感图像中的差异明显,有利于提高水田识别的精度。
[0103]
进一步的,所述第一遥感图像包括第一sentinel-2遥感图像和第一gf-2遥感图像,所述第二遥感图像包括第二sentinel-2遥感图像和第二gf-2遥感图像。sentinel-2遥感图像的幅宽为290km,适用于市域尺度和省域尺度的遥感应用,而结合gf-2高分辨率卫星影像,可以提高水田识别的精确程度。
[0104]
进一步的,为了提高遥感图像水田识别精度,在水稻的生长期和收割期的遥感图像,选择少云或者无云的遥感图像。
[0105]
预处理模块2:对所述第一遥感图像和所述第二遥感图像进行预处理,获得预处理后的第一遥感图像和预处理后的第二遥感图像;
[0106]
具体的,所述预处理包括将所述第一遥感图像和所述第二遥感图像依次进行辐射校正、大气校正、正射校正、重采样、几何配准和图像归一化的预处理,获得预处理后的第一
遥感图像和预处理后的第二遥感图像。所述预处理后的第一遥感图像和预处理后的第二遥感图像,能够反映地物的真实反射率,不同遥感影像上同一地点的坐标一致,同一地物的反射率值相近,通过主成分分析将信息集中在1到2个特征波段上。
[0107]
图像分析模块3:将预处理后的第一遥感图像和预处理后的第二遥感图像进行时序多特征差异图像分析,获得时序多特征差异图像;
[0108]
具体的,提取所述预处理后的第一遥感图像的第一gf-2遥感图像,提取所述预处理后的第二遥感图像的第二gf-2图像,对所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像进行差值处理,得到第一gf-2差值图像,对所述第一gf-2差图像进行多尺度分析,获得第二gf-2差值图像。
[0109]
具体的,所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像的地物边界特征明显,在水稻收割后的图像中,地物的边界特征更清晰,通过差值处理和多尺度分析,进一步的减少所述预处理后的第一gf-2遥感图像和所述预处理后的第二gf-2遥感图像的异物同谱的影响,提高水田边界的提取精度。
[0110]
具体的,提取所述预处理后的第一遥感图像的第一sentinel-2遥感图像,提取所述预处理后的第二遥感图像的第二sentinel-2遥感图像,对所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行指数分析,获得指数分析图像。
[0111]
进一步的,通过比较水稻生长期和收割后的各个指数图像,在所述指数分析图像中提取水田样本最大值图像和水田样本最小值图像,将所述水田样本最大值图像和所述水田样本最小值图像进行差值处理和多尺度分析,获得时序指数差值图像。
[0112]
具体的,将所述预处理后的第一sentinel-2遥感图像和所述预处理后的第二sentinel-2遥感图像进行差值处理,获得sentinel-2差值图像。
[0113]
对所述第一gf-2差值图像、所述sentinel-2差值图像以及所述时序指数差值图像进行主成分分析,提取主成分数据,包括:
[0114]
对所述第一gf-2差值图像进行主成分分析,取第一个主成分分量;
[0115]
对所述sentinel-2差值图像进行主成分分析,取前两个主成分分量;
[0116]
对所述时序指数差值图像进行主成分分析,取前三个主成分分量。
[0117]
将所述主成分数据联合所述第二gf-2差值图像,构建时序多特征差异图像,使得参与水田提取的图像,具备水田边界精确提取的能力和较高的识别的灵敏度,能够准确的与其他农用地区分。
[0118]
进一步的,在所述第一遥感图像和所述第二遥感图像上建立识别水田的训练样本,包括水田、林地、其他农用地、裸地、人工地表和水域。结合经验进行目视判别,在不同影像上建立统一的训练样本,并进行样本的可分离性分析,保证同一位置的样本在不同影像上表达的地物相同,训练样本最优。
[0119]
结合所述时序多特征差异图像、所述时序指数差值图像、所述第一遥感图像和所述第二遥感图像分析训练样本的可分离性,通过所述训练样本在各个图像中的可分离性对比,检验所述时序多特征差异图像的水田识别精度,得到所述训练样本在所述时序多特征差异图像中的可分离性高,所述时序多特征差异图像的水田识别精度高。
[0120]
统计分析模块4:利用随机森林算法对所述时序多特征差异图像进行解译,并对解
译结果进行精度评估,提取水田信息,统计水田面积。
[0121]
具体的,利用随机森林算法对所述第一遥感图像、所述第二遥感图像、所述时序指数差值图像和所述时序多特征差异图像进行解译,并将解译结果进行对比,所述时序多特征差异图像的水田边界识别精度高,能够精准识别水田的位置。
[0122]
本发明实施例提供了基于高分遥感图像的水田面积提取装置,所述装置通过提取高分遥感图像,进行时序多特征差异图像处理,获取时序多特征图像,提高水田识别精度,利用随机森林算法对水田进行提取,以减少数据量并提高计算速度,实现对水田精确识别。
[0123]
本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,readonly memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
[0124]
另外,以上对本发明实施例进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1