一种飞机样板缺陷检测方法及装置
1.本发明属于样板检测技术领域,尤其涉及一种飞机样板缺陷检测方法及装置。
背景技术:
2.模线样板技术是连接飞机设计和制造的桥梁。模线样板技术的工作方法是首先根据飞机图样绘制出真实形状,然后按标准制造各种工艺装备,再按工艺装备制造出零件。模线样板技术包括模线和样板两部分内容,模线是将飞机的零件及结构按1:1的实际尺寸画在图板上,这一真实图形称为模线;样板是一种平面量具,是加工和检验带曲面外形的零件、装配件和相应工艺装备的依据。模线样板设计就是根据飞机结构图样和制造要求,按实物大小精确地作出整体零件或组合件的外形。
3.绘制在钢板上的模线保证了准确性与唯一性。但是,由于钢板笨重、不透明,在样板加工检查过程中不能直接加工检查内部划线,需要借助辅助工具或模具定位测量。而聚酯薄膜具有一定的硬度,较好的透明度,不易老化并可以卷弯,与立体样板样件进行贴合使用,因此,聚酯薄膜成为了绘制模线数据的基本介质。最初绘制在聚酯薄膜上的模线用于样板的加工及检验,样板加工后直接交检,在检验过程中发现样板和模线不符,则按照模线返修样板。
4.然而,样板检验过程是依靠人工目检的方法,目视精度低,人工成本和聚酯薄膜成本较高,检验效率和检验精度较低。
技术实现要素:
5.本发明提供一种飞机样板缺陷检测方法及装置,可解决现有技术中依靠人工目检的方法,目视精度低,人工成本和聚酯薄膜成本较高,检验效率和检验精度较低的问题。
6.第一方面,本发明提供一种飞机样板缺陷检测方法,包括:
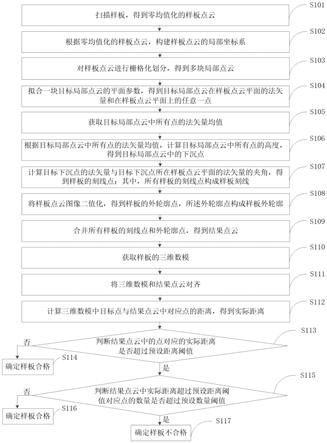
7.扫描样板,得到零均值化的样板点云;
8.根据零均值化的样板点云,构建样板点云的局部坐标系;
9.对样板点云进行栅格化划分,得到多块局部点云;
10.拟合一块目标局部点云的平面参数,得到目标局部点云在样板点云平面的法矢量和在样板点云平面上的任意一点;
11.获取目标局部点云中所有点的法矢量均值;
12.根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点;
13.计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线;
14.将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓;
15.合并所有样板的刻线点和外轮廓点,得到结果点云;
16.获取样板的三维数模;
17.将三维数模和结果点云对齐;
18.计算三维数模中目标点与结果点云中对应点的距离,得到实际距离;
19.判断结果点云中的点对应的实际距离是否超过预设距离阈值;
20.如果否,确定样板合格;
21.如果是,判断结果点云中实际距离超过预设距离阈值对应点的数量是否超过预设数量阈值;
22.如果否,确定样板合格;
23.如果是,确定样板不合格。
24.进一步地,所述根据零均值化的样板点云,构建样板点云的局部坐标系,包括:
25.计算零均值化样板点云排列成3
×
n的矩阵和零均值化样板点云排列成3
×
n的矩阵的转置矩阵的乘积,得到协方差矩阵;其中,n为零均值化样板点云中点的数量;
26.计算协方差矩阵的三个相互正交的特征向量a1,a2,a3,其中a1,a2,a3分别对应的特征值λ1、λ2、λ3满足λ1>λ2>λ3;
27.将特征向量a1,a2,a3分别作为局部坐标系的x1轴、y1轴、z1轴的方向,零点o1为坐标系原点,构建样板点云的局部坐标系。
28.进一步地,所述根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点,包括:
29.根据以下公式计算目标局部点云中所有点的高度:
[0030][0031]
其中,为目标局部点云j中所有点的法矢量均值;vj为目标局部点云j在样板点云平面的法矢量;p
ji
为目标局部点云j中第i个点;p
j0
为目标局部点云j中任意一点;h
ji
为目标局部点云j中第i个点的高度;
[0032]
设置目标高度阈值,目标局部点云中高度小于目标高度阈值对应的点为下沉点。
[0033]
进一步地,所述计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线,包括:
[0034]
根据以下公式计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角:
[0035][0036]
其中,r
ji
为目标局部点云j中第i个下沉点的法矢量与第i个下沉点所在样板点云平面的法矢量的夹角;vj为目标局部点云j在样板点云平面的法矢量;v
ji
为目标局部点云j中第i个下沉点的法矢量;
[0037]
设置目标角度阈值,目标局部点云中夹角小于目标角度阈值对应的下沉点为刻线点。
[0038]
进一步地,所述将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓,包括:
[0039]
计算样板点云中目标点和距目标点最近的点的距离;
[0040]
根据以下公式计算样板点云空间分辨率:
[0041][0042]
其中,l为样板点云空间分辨率;n为样板点云中点的总数;di为样板点云中第i个点和距第i个点最近的点的距离;
[0043]
将x1o1y1平面划分为多个以空间分辨率为间距的栅格,得到二值图像;其中每个栅格为二值图像的一个像素,二值图像中所有像素初始值均设为0;
[0044]
遍历样板点云中所有的点,将遍历到样板点云中的点所在的栅格对应的像素设置为1值像素;
[0045]
遍历二值图像中所有0值像素,将周围8个像素中超过目标数量的1值像素的目标0值像素设置为1值像素;
[0046]
遍历二值图像中所有1值像素,将邻接有0值像素的1值像素作为轮廓像素;
[0047]
将轮廓像素对应栅格中的点作为样板的外轮廓点。
[0048]
第二方面,本发明提供一种飞机样板缺陷检测装置,包括:
[0049]
样板扫描模块,用于扫描样板,得到零均值化的样板点云;
[0050]
坐标系构建模块,用于根据零均值化的样板点云,构建样板点云的局部坐标系;
[0051]
划分模块,用于对样板点云进行栅格化划分,得到多块局部点云;
[0052]
平面拟合模块,用于拟合一块目标局部点云的平面参数,得到目标局部点云在样板点云平面的法矢量和在样板点云平面上的任意一点;
[0053]
第一获取模块,用于获取目标局部点云中所有点的法矢量均值;
[0054]
第一计算模块,用于根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点;
[0055]
第二计算模块,用于计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线;
[0056]
图像二值化模块,用于将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓;
[0057]
合并模块,用于合并所有样板的刻线点和外轮廓点,得到结果点云;
[0058]
第二获取模块,用于获取样板的三维数模;
[0059]
对齐模块,用于将三维数模和结果点云对齐;
[0060]
第三计算模块,用于计算三维数模中目标点与结果点云中对应点的距离,得到实际距离;
[0061]
第一判断模块,用于判断结果点云中的点对应的实际距离是否超过预设距离阈值;
[0062]
第一确定模块,用于在第一判断模块确定结果点云中的点对应的实际距离没有超过预设距离阈值时,确定样板合格;
[0063]
第二判断模块,用于在第一判断模块确定结果点云中的点对应的实际距离超过预
设距离阈值时,判断结果点云中实际距离超过预设距离阈值对应点的数量是否超过预设数量阈值;
[0064]
第二确定模块,用于在第二判断模块确定结果点云中实际距离超过预设距离阈值对应点的数量没有超过预设数量阈值时,确定样板合格;
[0065]
第三确定模块,用于在第二判断模块确定结果点云中实际距离超过预设距离阈值对应点的数量超过预设数量阈值时,确定样板不合格。
[0066]
进一步地,所述坐标系构建模块包括:
[0067]
第一计算单元,用于计算零均值化样板点云排列成3
×
n的矩阵和零均值化样板点云排列成3
×
n的矩阵的转置矩阵的乘积,得到协方差矩阵;其中,n为零均值化样板点云中点的数量;
[0068]
第二计算单元,用于计算协方差矩阵的三个相互正交的特征向量a1,a2,a3,其中a1,a2,a3分别对应的特征值λ1、λ2、λ3满足λ1>λ2>λ3;
[0069]
构建单元,用于将特征向量a1,a2,a3分别作为局部坐标系的x1轴、y1轴、z1轴的方向,零点o1为坐标系原点,构建样板点云的局部坐标系。
[0070]
进一步地,所述第一计算模块包括:
[0071]
第三计算单元,用于根据以下公式计算目标局部点云中所有点的高度:
[0072][0073]
其中,为目标局部点云j中所有点的法矢量均值;vj为目标局部点云j在样板点云平面的法矢量;p
ji
为目标局部点云j中第i个点;p
j0
为目标局部点云j中任意一点;h
ji
为目标局部点云j中第i个点的高度;
[0074]
高度阈值设置单元,用于设置目标高度阈值,目标局部点云中高度小于目标高度阈值对应的点为下沉点。
[0075]
进一步地,所述第二计算模块包括:
[0076]
第四计算单元,用于根据以下公式计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角:
[0077][0078]
其中,r
ji
为目标局部点云j中第i个下沉点的法矢量与第i个下沉点所在样板点云平面的法矢量的夹角;vj为目标局部点云j在样板点云平面的法矢量;v
ji
为目标局部点云j中第i个下沉点的法矢量;
[0079]
角度阈值设置单元,用于设置目标角度阈值,目标局部点云中夹角小于目标角度阈值对应的下沉点为刻线点。
[0080]
进一步地,所述图像二值化模块包括:
[0081]
第五计算单元,用于计算样板点云中目标点和距目标点最近的点的距离;
[0082]
第六计算单元,用于根据以下公式计算样板点云空间分辨率:
[0083][0084]
其中,l为样板点云空间分辨率;n为样板点云中点的总数;di为样板点云中第i个点和距第i个点最近的点的距离;
[0085]
栅格划分单元,用于将x1o1y1平面划分为多个以空间分辨率为间距的栅格,得到二值图像;其中每个栅格为二值图像的一个像素,二值图像中所有像素初始值均为0;
[0086]
第一像素设置单元,用于遍历样板点云中所有的点,将遍历到样板点云中的点所在的栅格对应的像素设置为1值像素;
[0087]
第二像素设置单元,用于遍历二值图像中所有0值像素,将周围8个像素中超过目标数量的1值像素的目标0值像素设置为1值像素;
[0088]
轮廓像素提取单元,用于遍历二值图像中所有1值像素,将邻接有0值像素的1值像素作为轮廓像素;
[0089]
外轮廓点提取点,用于将轮廓像素对应栅格中的点作为样板的外轮廓点。
[0090]
本发明提供一种飞机样板缺陷检测方法及装置,其中方法包括扫描样板,得到零均值化的样板点云;根据零均值化的样板点云,构建样板点云的局部坐标系;对样板点云进行栅格化划分,得到多块局部点云;拟合一块目标局部点云的平面参数,得到目标局部点云在样板点云平面的法矢量和在样板点云平面上的任意一点;获取目标局部点云中所有点的法矢量均值;根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点;计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线;将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓;合并所有样板的刻线点和外轮廓点,得到结果点云;获取样板的三维数模;将三维数模和结果点云对齐;计算三维数模中目标点与结果点云中对应点的距离,得到实际距离;判断结果点云中的点对应的实际距离是否超过预设距离阈值;如果否,确定样板合格;如果是,判断结果点云中实际距离超过预设距离阈值对应点的数量是否超过预设数量阈值;如果否,确定样板合格;如果是,确定样板不合格。采用上述方案,避免依靠人工目检样板,降低样板检测的成本,提高样板检验效率和检验精度。
附图说明
[0091]
为了更清楚地说明本发明的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0092]
图1为本发明实施例提供的一种飞机样板缺陷检测方法的流程示意图;
[0093]
图2为本发明实施例提供的样板点云进行栅格化划分示意图;
[0094]
图3为本发明实施例提供的目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角示意图;
[0095]
图4为本发明实施例提供的0值像素周围8个像素分布示意图;
[0096]
图5为本发明实施例提供的一种飞机样板缺陷检测装置的结构示意图。
具体实施方式
[0097]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0098]
本发明提供一种飞机样板缺陷检测方法,如图1所示,所述检测方法包括:
[0099]
步骤s101,扫描样板,得到零均值化的样板点云。
[0100]
本步骤中,利用三维测量仪器,扫描样板,输出原始样板点云。计算原始样板点云的坐标均值,将原始样板点云中所有点的坐标减去坐标均值,得到零均值化的样板点云p={p1,p2,p3,...,pn}。
[0101]
步骤s102,根据零均值化的样板点云,构建样板点云的局部坐标系。
[0102]
本步骤中,计算零均值化样板点云排列成3
×
n的矩阵和零均值化样板点云排列成3
×
n的矩阵的转置矩阵的乘积,得到协方差矩阵;其中,n为零均值化样板点云中点的数量;
[0103]
计算协方差矩阵的三个相互正交的特征向量a1,a2,a3,其中a1,a2,a3分别对应的特征值λ1、λ2、λ3满足λ1>λ2>λ3;
[0104]
将特征向量a1,a2,a3分别作为局部坐标系的x1轴、y1轴、z1轴的方向,零点o1为坐标系原点,构建样板点云的局部坐标系。
[0105]
步骤s103,对样板点云进行栅格化划分,得到多块局部点云。
[0106]
本步骤中,如图2所示,因为整块样板不是绝对平整的,可能会存在微小弧度,可在x1o1y1平面上作间隔为5mm的正方形栅格,将样板点云p={p1,p2,p3,...,pn}划分为多块局部点云,减小后续步骤的计算误差。
[0107]
步骤s104,拟合一块目标局部点云的平面参数,得到目标局部点云在样板点云平面的法矢量和在样板点云平面上的任意一点。
[0108]
本步骤中,采用ransac算法拟合一块目标局部点云的平面参数,获取目标局部点云在样板点云平面的法矢量vj和在样板点云平面上的任意一点p0。
[0109]
步骤s105,获取目标局部点云中所有点的法矢量均值。
[0110]
本步骤中,同样的利用ransac算法获取目标局部点云中所有点的法矢量均值。
[0111]
步骤s106,根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点。
[0112]
本步骤中,根据以下公式计算目标局部点云中所有点的高度:
[0113][0114]
其中,为目标局部点云j中所有点的法矢量均值;vj为目标局部点云j在样板点云平面的法矢量;p
ji
为目标局部点云j中第i个点;p
j0
为目标局部点云j中任意一点;h
ji
为目标局部点云j中第i个点的高度。
[0115]
设置目标高度阈值,目标高度阈值t0通常取-0.03mm,目标局部点云中高度小于目
标高度阈值对应的点为下沉点,即将目标局部点云中h
ji
<t0的点确定为下沉点。
[0116]
步骤s107,计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线。
[0117]
本步骤中,根据以下公式计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角:
[0118][0119]
如图3所示,r
ji
为目标局部点云j中第i个下沉点的法矢量与第i个下沉点所在样板点云平面的法矢量的夹角;vj为目标局部点云j在样板点云平面的法矢量;v
ji
为目标局部点云j中第i个下沉点的法矢量。
[0120]
设置目标角度阈值,目标角度阈值β0通常取5
°
,目标局部点云中夹角小于目标角度阈值对应的下沉点为刻线点,即将r
ji
<β0的点确定为刻线点。参见图4,浅色区域为下沉点,深色区域为刻线点,下沉点所在区域比刻线点所在区域宽,可准确提取样板刻线。
[0121]
步骤s108,将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓。
[0122]
本步骤中,遍历样板点云p={p1,p2,p3,...,pn}中每一个点,计算样板点云中目标点和距目标点最近的点的距离。
[0123]
根据以下公式计算样板点云空间分辨率:
[0124][0125]
其中,l为样板点云空间分辨率;n为样板点云中点的总数;di为样板点云中第i个点和距第i个点最近的点的距离。
[0126]
将x1o1y1平面划分为多个以空间分辨率为间距的栅格,得到二值图像;其中每个栅格为二值图像的一个像素,二值图像中所有像素初始值均设为0;
[0127]
遍历样板点云中所有的点,将遍历到样板点云中的点所在的栅格对应的像素设置为1值像素;
[0128]
遍历二值图像中所有0值像素,如图4所示,将周围8个像素中超过目标数量的1值像素的目标0值像素设置为1值像素;其中目标数量不超过8个,可选5个。
[0129]
遍历二值图像中所有1值像素,将邻接有0值像素的1值像素作为轮廓像素。
[0130]
将轮廓像素对应栅格中的点作为样板的外轮廓点。
[0131]
步骤s109,合并所有样板的刻线点和外轮廓点,得到结果点云。
[0132]
步骤s110,获取样板的三维数模。
[0133]
步骤s111,将三维数模和结果点云对齐。
[0134]
步骤s112,计算三维数模中目标点与结果点云中对应点的距离,得到实际距离。
[0135]
步骤s113,判断结果点云中的点对应的实际距离是否超过预设距离阈值。
[0136]
步骤s114,如果否,确定样板合格。
[0137]
步骤s115,如果是,判断结果点云中实际距离超过预设距离阈值对应点的数量是否超过预设数量阈值。
[0138]
步骤s116,如果否,确定样板合格。
[0139]
步骤s117,如果是,确定样板不合格。
[0140]
步骤s109-s117中,利用polyworks测量软件,导入样板的三维数模和结果点云并将三维数模和结果点云对齐,计算三维数模中目标点与结果点云中对应点的距离,得到实际距离d
ri
,同时将d
ri
>1mm的点去除。遍历三维数模中的每一个点,根据模线样板航空工业标准hb-240-89,对三维数模中目标点设置允许公差,即预设距离阈值。
[0141]
如图5所示,本发明实施例还提供一种飞机样板缺陷检测装置,包括:
[0142]
样板扫描模块10,用于扫描样板,得到零均值化的样板点云。
[0143]
坐标系构建模块20,用于根据零均值化的样板点云,构建样板点云的局部坐标系。
[0144]
划分模块30,用于对样板点云进行栅格化划分,得到多块局部点云。
[0145]
平面拟合模块40,用于拟合一块目标局部点云的平面参数,得到目标局部点云在样板点云平面的法矢量和在样板点云平面上的任意一点。
[0146]
第一获取模块50,用于获取目标局部点云中所有点的法矢量均值。
[0147]
第一计算模块60,用于根据目标局部点云中所有点的法矢量均值,计算目标局部点云中所有点的高度,得到目标局部点云中的下沉点。
[0148]
第二计算模块70,用于计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角,得到样板的刻线点;其中,所有样板的刻线点构成样板刻线。
[0149]
图像二值化模块80,用于将样板点云图像二值化,得到样板的外轮廓点,所述外轮廓点构成样板外轮廓。
[0150]
合并模块90,用于合并所有样板的刻线点和外轮廓点,得到结果点云。
[0151]
第二获取模块100,用于获取样板的三维数模。
[0152]
对齐模块110,用于将三维数模和结果点云对齐。
[0153]
第三计算模块120,用于计算三维数模中目标点与结果点云中对应点的距离,得到实际距离。
[0154]
第一判断模块130,用于判断结果点云中的点对应的实际距离是否超过预设距离阈值。
[0155]
第一确定模块140,用于在第一判断模块确定结果点云中的点对应的实际距离没有超过预设距离阈值时,确定样板合格。
[0156]
第二判断模块150,用于在第一判断模块确定结果点云中的点对应的实际距离超过预设距离阈值时,判断结果点云中实际距离超过预设距离阈值对应点的数量是否超过预设数量阈值。
[0157]
第二确定模块160,用于在第二判断模块确定结果点云中实际距离超过预设距离阈值对应点的数量没有超过预设数量阈值时,确定样板合格。
[0158]
第三确定模块170,用于在第二判断模块确定结果点云中实际距离超过预设距离阈值对应点的数量超过预设数量阈值时,确定样板不合格。
[0159]
可选的,所述坐标系构建模块包括:
[0160]
第一计算单元,用于计算零均值化样板点云排列成3
×
n的矩阵和零均值化样板点云排列成3
×
n的矩阵的转置矩阵的乘积,得到协方差矩阵;其中,n为零均值化样板点云中点的数量。
[0161]
第二计算单元,用于计算协方差矩阵的三个相互正交的特征向量a1,a2,a3,其中
a1,a2,a3分别对应的特征值λ1、λ2、λ3满足λ1>λ2>λ3。
[0162]
构建单元,用于将特征向量a1,a2,a3分别作为局部坐标系的x1轴、y1轴、z1轴的方向,零点o1为坐标系原点,构建样板点云的局部坐标系。
[0163]
可选的,所述第一计算模块包括:
[0164]
第三计算单元,用于根据以下公式计算目标局部点云中所有点的高度:
[0165][0166]
其中,为目标局部点云j中所有点的法矢量均值;vj为目标局部点云j在样板点云平面的法矢量;p
ji
为目标局部点云j中第i个点;p
j0
为目标局部点云j中任意一点;h
ji
为目标局部点云j中第i个点的高度。
[0167]
高度阈值设置单元,用于设置目标高度阈值,目标局部点云中高度小于目标高度阈值对应的点为下沉点。
[0168]
可选的,所述第二计算模块包括:
[0169]
第四计算单元,用于根据以下公式计算目标下沉点的法矢量与目标下沉点所在样板点云平面的法矢量的夹角:
[0170][0171]
其中,r
ji
为目标局部点云j中第i个下沉点的法矢量与第i个下沉点所在样板点云平面的法矢量的夹角;vj为目标局部点云j在样板点云平面的法矢量;v
ji
为目标局部点云j中第i个下沉点的法矢量。
[0172]
角度阈值设置单元,用于设置目标角度阈值,目标局部点云中夹角小于目标角度阈值对应的下沉点为刻线点。
[0173]
可选的,所述图像二值化模块包括:
[0174]
第五计算单元,用于计算样板点云中目标点和距目标点最近的点的距离。
[0175]
第六计算单元,用于根据以下公式计算样板点云空间分辨率:
[0176][0177]
其中,l为样板点云空间分辨率;n为样板点云中点的总数;di为样板点云中第i个点和距第i个点最近的点的距离。
[0178]
栅格划分单元,用于将x1o1y1平面划分为多个以空间分辨率为间距的栅格,得到二值图像;其中每个栅格为二值图像的一个像素,二值图像中所有像素初始值均为0。
[0179]
第一像素设置单元,用于遍历样板点云中所有的点,将遍历到样板点云中的点所在的栅格对应的像素设置为1值像素。
[0180]
第二像素设置单元,用于遍历二值图像中所有0值像素,将周围8个像素中超过目标数量的1值像素的目标0值像素设置为1值像素。
[0181]
轮廓像素提取单元,用于遍历二值图像中所有1值像素,将邻接有0值像素的1值像素作为轮廓像素。
[0182]
外轮廓点提取点,用于将轮廓像素对应栅格中的点作为样板的外轮廓点。
[0183]
本说明书中各个实施例之间相同相似的部分互相参见即可。尤其,对于装置实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例中的说明即可。
[0184]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1