一种菲涅尔透镜灯光学助降建模仿真方法及助降系统与流程
1.本发明属于航空控制技术领域,具体涉及一种菲涅尔透镜灯光学助降建模仿真方法,还涉及一种菲涅尔透镜灯光学助降系统。
背景技术:
2.现有航母的雷达助降系统具有与生俱来的缺点——易受电子干扰。因此需要与电视助降装置、激光助降装置系统等辅助装置配合使用,取长补短,但是诸多辅助装置使得助降系统结构更加复杂,控制过程更加繁琐,低效。
3.目前,该领域提出了采用菲涅尔透镜灯光学助降系统进行舰载机助降,菲涅尔透镜灯光学助降系统由助降系统、飞行员和飞控系统构成,其功能是助降系统在甲板运动的情况下提供一条稳定的下滑基准波束,飞行员在该基准光波束的引导下,通过飞控系统来完成着舰任务。在海浪、海涌的作用下,航母产生随机的俯仰运动、滚转运动和沉浮运动。在航母甲板运动下,下滑基准光波束也会随着航母的运动产生波动,从而使对助降操作产生阻碍。因此必须以某种形式稳定下滑光波束,以尽可能消除甲板运动影响。
技术实现要素:
4.本发明的目的是提供一种菲涅尔透镜灯光学助降建模仿真方法,该方法可准确、快速地辅助飞行员判断着舰时的横纵向偏差,进行正常着舰。
5.本发明的目的还在于提供一种菲涅尔透镜灯光学助降系统。
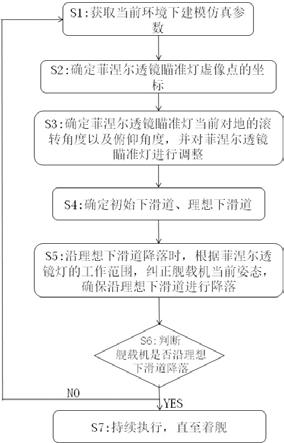
6.本发明所采用的第一种技术方案是,一种菲涅尔透镜灯光学助降建模仿真方法,具体操作步骤如下:s1. 获取当前环境下建模仿真参数;s2. 根据建模仿真参数,确定菲涅尔透镜瞄准灯虚像点的坐标;s3. 根据建模仿真参数,确定菲涅尔透镜瞄准灯当前对地的滚转角度以及俯仰角度,并对菲涅尔透镜瞄准灯进行调整;s4. 根据舰载机当前位置及建模仿真参数,确定初始下滑道、理想下滑道;s5. 沿理想下滑道降落时,根据菲涅尔透镜灯的工作范围,纠正舰载机当前姿态,确保沿理想下滑道进行降落;s6. 判断舰载机是否沿理想下滑道降落;s7. 若舰载机沿理想下滑道降落,则持续执行,直至着舰;s8. 若舰载机未沿理想下滑道降落,则返回s1。
7.建模仿真参数包括:机长;舰的沉浮,向下为正;透镜瞄准灯组的高度;理想光束下滑角;
菲涅尔透镜灯在甲板系下的位置坐标;菲涅尔透镜灯虚像点滚转变化角度,未加线稳定控制时,虚像点滚转变化角度为0;灯组下层与上层距基准光波束的角度范围;飞机眼位位置坐标;飞机尾钩位置坐标;飞机着舰时的俯仰角;斜甲板初始偏航角;眼位和尾钩连线与机体x轴的夹角;理想着舰点位置坐标;飞机着舰时的俯仰角与眼位和尾钩连线与机体x轴的夹角之和。
8.步骤s2包括:s21.根据灯组的高度、理想光束下滑角、菲涅尔透镜灯虚像点滚转变化角度以及灯组下层与上层距基准光波束的角度范围,确定菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差;s22.根据菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差、理想光束下滑角、菲涅尔透镜灯虚像点滚转变化角度以及灯组下层与上层距基准光波束的角度范围,确定菲涅尔透镜灯距菲涅尔透镜瞄准灯虚像点在甲板系下的水平距离;s23.根据菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差、菲涅尔透镜灯距菲涅尔透镜瞄准灯虚像点在甲板系下的水平距离以及菲涅尔透镜灯在甲板系下的位置坐标,确定菲涅尔透镜瞄准灯虚像点的坐标。
9.步骤s3包括:s31. 根据建模仿真参数,确定菲涅尔透镜瞄准灯虚像点的初始欧拉角、斜甲板变化欧拉角;s32. 根据菲涅尔透镜瞄准灯虚像点的初始欧拉角、斜甲板变化欧拉角,确定菲涅尔透镜瞄准灯虚像点的欧拉角;s33. 根据线稳定控制理论,确定菲涅尔透镜灯的当前高度变化,菲涅尔透镜灯的当前高度变化等于舰的沉浮;s34. 根据建模仿真参数、菲涅尔透镜瞄准灯虚像点的欧拉角,确定菲涅尔透镜瞄准灯当前对地的滚转角度以及菲涅尔透镜瞄准灯当前对地的俯仰角度,对菲涅尔透镜瞄准灯的角度进行调整。
10.步骤s31包括:s311. 根据飞机着舰时的俯仰角,眼位和尾钩连线与机体x轴的夹角,确定钩眼距;s312. 根据机长、理想光束下滑角、虚像点到甲板的高度、飞机着舰时的俯仰角与眼位和尾钩连线与机体x轴的夹角之和以及钩眼距、虚像点到理想着舰点的水平距离、虚像点到甲板中线的垂向距离,确定菲涅尔透镜瞄准灯虚像点初始滚转角;s313.根据理想光束下滑角、斜甲板初始偏航角以及菲涅尔透镜瞄准灯虚像点初始滚转角,确定菲涅尔透镜瞄准灯虚像点的初始欧拉角;
s314.选取甲板中线上两点,分别为舰尾在航母系下坐标和理想着舰点在航母系下坐标,确定斜甲板俯仰角的变化;s315.选取瞄准灯在航母系下坐标和瞄准灯在跑道中线映射点在航母系下的坐标进行相关转化,确定斜甲板滚转角的变化;s316.根据斜甲板俯仰角的变化、斜甲板滚转角的变化,确定斜甲板变化欧拉角。
11.s34包括:s341. 根据建模仿真参数及菲涅尔透镜瞄准灯虚像点的欧拉角,计算菲涅尔透镜瞄准灯虚像点滚转变化角度、菲涅尔透镜瞄准灯虚像点俯仰变化角度;s342. 根据菲涅尔透镜瞄准灯虚像点滚转变化角度、菲涅尔透镜瞄准灯虚像点俯仰变化角度以及菲涅尔透镜瞄准灯虚像点的欧拉角,确定菲涅尔透镜瞄准灯的实际对地的滚转角度以及菲涅尔透镜瞄准灯的实际对地的俯仰角度;s343. 根据菲涅尔透镜瞄准灯的实际对地的滚转角度、菲涅尔透镜瞄准灯的实际对地的俯仰角度,并对菲涅尔透镜瞄准灯进行调整。
12.步骤s4包括:s41.根据菲涅尔透镜瞄准灯虚像点的坐标、菲涅尔透镜灯虚像点滚转变化角度、菲涅尔透镜瞄准灯的实际对地的俯仰角度、飞机眼位位置坐标、菲涅尔透镜瞄准灯当前的高度,确定舰载机当前位置坐标;s42.连接菲涅尔透镜瞄准灯虚像点、舰载机当前位置,形成初始下滑道;s43.根据初始下滑道、理想光束下滑角,形成理想下滑道。
13.步骤s4后包括:调整舰载机从初始下滑道逐步调整至理想下滑道。
14.菲涅尔透镜灯的工作范围包括纵向范围和侧向范围:纵向范围为菲涅尔透镜灯瞄准灯组中每个灯的所发出光束距理想光波束的纵向范围;侧向范围通过舰载机眼位到透镜甲板系下的x轴向距离及菲涅尔瞄准灯的水平视角确定。
15.本发明采用的第二种技术方案是,一种菲涅尔透镜灯光学助降系统包括:建模仿真参数获取模块,用于执行步骤s1,菲涅尔瞄准灯虚像点坐标获取模块,用于执行步骤s2,菲涅尔灯虚像点欧拉角计算模块,用于执行步骤s3,菲涅尔灯稳定控制模块,用于执行步骤s3,下滑道计算模块,用于执行步骤s4,舰载机降落及纠正模块,用于执行步骤s5,舰载机位置判断模块,用于执行步骤s6。
16.本发明的有益效果是,一种菲涅尔透镜灯光学助降建模仿真方法,保证下滑光波束既不受航母俯仰和滚转的影响,使之在惯性空间相对稳定,从而极大地减小飞机的机动,也减轻驾驶员的操纵负担。
17.本发明利用菲涅尔透镜灯的线稳定控制方法,将舰的纵摇和横摇姿态转化为菲涅尔透镜灯对地俯仰与滚转角度,利用旋转菲涅尔透镜灯的角度来抑制由于舰体运动导致引
导光波束的变化;在菲涅尔透镜灯所规定的可视范围内,利用舰载机与舰的相对距离几何关系以及菲涅尔透镜灯对地的俯仰与滚转补偿角,计算菲涅尔透镜灯各层光波束的高度,得到菲涅尔透镜灯光波束的高度范围;在菲涅尔透镜灯的可视范围内,将舰载机与舰的相对高度与菲涅尔透镜各层光波束的高度区域比较,确定飞行员所看到菲涅尔透镜灯的灯层,舰载机沿着理想下滑道进行降落。本发明的方法可准确、快速地辅助飞行员判断着舰时的横纵向偏差,进行正常着舰。
附图说明
18.图1是本发明一种菲涅尔透镜灯光学助降建模仿真方法的流程图;图2是本发明一种菲涅尔透镜灯光学助降建模仿真方法的钩眼距计算方法图;图3是本发明一种菲涅尔透镜灯光学助降建模仿真方法的透镜初始滚转角计算原理图;图4是本发明一种菲涅尔透镜灯光学助降建模仿真方法的菲涅尔瞄准灯的光波束纵向范围示意图。
具体实施方式
19.下面结合附图和具体实施方式对本发明进行详细说明。
20.本发明一种菲涅尔透镜灯光学助降建模仿真方法,结合图1~图4所示,现结合算法具体实施形式进一步对其进行详细描述,具体步骤如下:s1、获取菲涅尔透镜灯光学助降系统仿真的基本参数;该系统中所需的基本参数有:舰的沉浮,向下为正,透镜瞄准灯组的高度,理想光束下滑,透镜灯在甲板系下的位置坐标,透镜灯虚像点滚转变化角度,以及透镜灯组下层与上层距基准光波束的角度范围,飞机眼位位置坐标eye,飞机尾钩位置坐标hook,为飞机着舰时的俯仰角,为眼位和尾钩连线与机体x轴的夹角,为理想着舰点位置,为飞机着舰时的俯仰角与眼位和尾钩连线与机体x轴的夹角之和,为机长。
21.s2、根据建模仿真参数,确定菲涅尔透镜瞄准灯虚像点的坐标,具体如下:s21、如图4所示,根据透镜瞄准灯组的高、理想光束下滑角、菲涅尔透镜灯虚像点滚转变化角度以及灯组下层与上层距基准光波束的角度范围,确定菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差;(1)s22. 如图4所示,根据菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差、理想光束下滑角、菲涅尔透镜灯虚像点滚转变化角度以及灯组下层与上层距基准光波束的角度范围,确定菲涅尔透镜灯距菲涅尔透镜瞄准灯虚像点在甲板系下的水平距离;(2)
s23.根据菲涅尔透镜灯底端距菲涅尔透镜瞄准灯虚像点的高度差、菲涅尔透镜灯距菲涅尔透镜瞄准灯虚像点在甲板系下的水平距离以及菲涅尔透镜灯在甲板系下的位置坐标、、,确定菲涅尔透镜瞄准灯虚像点的坐标,如下式(3)(3)s3. 根据建模仿真参数,确定菲涅尔透镜瞄准灯当前对地的滚转角度以及俯仰角度,并对菲涅尔透镜瞄准灯进行调整,具体如下:s31. 根据建模仿真参数,确定菲涅尔透镜瞄准灯虚像点的初始欧拉角、斜甲板变化欧拉角,具体包括:s311. 根据飞机着舰时的俯仰角,眼位和尾钩连线与机体x轴的夹角,确定钩眼距,如图2所示:(4)(5)(6)、、为飞机眼位在机体系下x,y,z轴的分量,、、分别为飞机尾钩位置在机体系x,y,z轴的分量;s312. 如图3所示,根据机长、理想光束下滑角、虚像点到甲板的高度、飞机着舰时的俯仰角与眼位和尾钩连线与机体x轴的夹角之和以及钩眼距、虚像点到理想着舰点的水平距离、虚像点到甲板中线的垂向距离,确定菲涅尔透镜瞄准灯虚像点初始滚转角;(7)其中,为理想着舰点位置,为透镜灯虚像点位置;s313. 根据理想光束下滑角、斜甲板初始偏航角以及菲涅尔透镜瞄准灯虚像点初始滚转角,确定菲涅尔透镜瞄准灯虚像点的初始欧拉角;(8)其中,为斜甲板倾斜角;s314. 选取甲板中线上两点,分别为舰尾在航母系下坐标和理想着舰点在航母系下坐标,确定斜甲板俯仰角的变化;首先对本发明涉及的各坐标系进行解释:地系(g):x轴为北向,y轴为东向,z轴为北向;航母系(c):以航母重心为坐标原点,x轴为航母艏艉连线指向舰艏, y轴为舰的右旋,z轴向下(其中舰的滚转角、俯仰角以及偏航角分别为);航母地系(g yaw):以航母重心为坐标原点,x轴为北向,y轴为舰的右旋,z轴向下;
甲板系(d):以航母重心为坐标原点,x轴为跑道中线指向舰艏方向, y轴为垂直于x轴的右方,z轴向下(斜甲板与直甲板的夹角为);机体系(b):原点位于飞行器参考重心位置,x轴在飞行器对称平面内、平行于机身轴线或机翼的平均气动弦线,指向前;z轴在机身对称平面内,垂直于x轴,指向下;y轴垂直于oxz平面内,指向下。
22.(9)s315. 选取瞄准灯在航母系下坐标和瞄准灯在跑道中线映射点在航母系下的坐标进行相关转化,确定斜甲板滚转角的变化;(10)其中,为航母系到甲板系的转换矩阵为:;航母系到航母地系的转换矩阵为:;s316.根据斜甲板俯仰角的变化、斜甲板滚转角的变化,确定斜甲板变化欧拉角为角为;s32. 根据菲涅尔透镜瞄准灯虚像点的初始欧拉角、斜甲板变化欧拉角,确定菲涅尔透镜瞄准灯虚像点的欧拉角;(11)s33. 根据线稳定控制理论,确定菲涅尔透镜灯的当前高度变化,菲涅尔透镜灯的当前高度变化等于舰的沉浮;s34. 根据建模仿真参数、菲涅尔透镜瞄准灯虚像点的欧拉角,确定菲涅尔透镜瞄准灯当前对地的滚转角度以及菲涅尔透镜瞄准灯当前对地的俯仰角度,对菲涅尔透镜瞄准灯的角度进行调整,具体包括:s341. 根据建模仿真参数及菲涅尔透镜瞄准灯虚像点的欧拉角,计算菲涅尔透镜瞄准灯虚像点滚转变化角度、菲涅尔透镜瞄准灯虚像点俯仰变化角度;(12)(13)其中,为虚像点跟舰运动的滚转角;为虚像点俯仰变化角度,为虚像点在地系下z方向高度,为虚像点在地系下z方向的初始高度,向下为正;s342. 根据菲涅尔透镜瞄准灯虚像点滚转变化角度、菲涅尔透镜瞄准灯虚像点俯
仰变化角度以及菲涅尔透镜瞄准灯虚像点的欧拉角,确定菲涅尔透镜瞄准灯的实际对地的滚转角度以及菲涅尔透镜瞄准灯的实际对地的俯仰角度;(14)(15)其中,为菲涅尔透镜瞄准灯实际对地的俯仰角,为菲涅尔透镜瞄准灯实际对地的滚转角。
23.s343. 根据菲涅尔透镜瞄准灯的实际对地的滚转角度、菲涅尔透镜瞄准灯的实际对地的俯仰角度,并对菲涅尔透镜瞄准灯进行调整。
24.s4. 根据舰载机当前位置及建模仿真参数,确定初始下滑道、理想下滑道,具体包括:s41.根据菲涅尔透镜瞄准灯虚像点的坐标、菲涅尔透镜灯虚像点滚转变化角度、菲涅尔透镜瞄准灯的实际对地的俯仰角度、飞机眼位位置坐标、菲涅尔透镜瞄准灯当前的高度,确定舰载机当前位置坐标,其中、、分别为舰载机当前位置在甲板系下x,y,z轴的分量;(16)(17)(18)为舰载机眼位距透镜的侧向偏差,为舰载机眼位到透镜甲板系下的x轴向距离,、分别为飞机眼位在甲板系下x,y轴的分量。
25.s42.连接菲涅尔透镜瞄准灯虚像点、舰载机当前位置,形成初始下滑道;s43.根据初始下滑道、理想光束下滑角,形成理想下滑道。
26.调整舰载机从初始下滑道逐步调整至理想下滑道。
27.s5. 沿理想下滑道降落时,根据菲涅尔透镜灯的工作范围,纠正舰载机当前姿态,确保沿理想下滑道进行降落;菲涅尔透镜灯的工作范围包括纵向范围和侧向范围1)菲涅尔瞄准灯的光波束纵向范围如下:(19)其中,为每个肉球位置的边界角度;纵向范围为菲涅尔透镜灯瞄准灯组中每个灯的所发出光束距理想光波束的纵向范围;菲涅尔透镜的瞄准灯共12个,根据每个灯的所发出光束距理想光波束角的角度,根据上式,计算13条边界光波束纵向高度。
28.2)侧向范围侧向范围通过舰载机眼位到透镜甲板系下的x轴向距离及菲涅尔瞄准灯的水平视角确定。
29.由于菲涅尔瞄准灯的水平视角为,由此可得其水平可视范围为:(20)s6. 判断舰载机是否沿理想下滑道降落;s7. 若舰载机沿理想下滑道降落,则持续执行,直至着舰;s8. 若舰载机未沿理想下滑道降落,则返回s1。
30.本发明一种菲涅尔透镜灯光学助降系统包括建模仿真参数获取模块,菲涅尔瞄准灯虚像点坐标获取模块,菲涅尔灯虚像点欧拉角计算模块,菲涅尔灯稳定控制模块,下滑道计算模块,舰载机降落及纠正模块,舰载机降落及纠正模块,舰载机位置判断模块;其中,建模仿真参数获取模块用于获取当前环境下建模仿真参数;菲涅尔瞄准灯虚像点坐标获取模块用于确定菲涅尔透镜瞄准灯虚像点的坐标;菲涅尔灯虚像点欧拉角计算模块和菲涅尔灯稳定控制模块用于确定菲涅尔透镜瞄准灯当前对地的滚转角度以及俯仰角度,并对菲涅尔透镜瞄准灯进行调整;下滑道计算模块根据舰载机当前位置及建模仿真参数,确定初始下滑道、理想下滑道;沿理想下滑道降落时,舰载机降落及纠正模块根据菲涅尔透镜灯的工作范围,纠正舰载机当前姿态,确保沿理想下滑道进行降落;舰载机降落及纠正模块用于判断舰载机是否沿理想下滑道降落。
31.在本发明中,由于实际下滑道高度、菲涅尔透镜各层光波束纵向距离、菲涅尔透镜灯可视范围高度其原理均为计算在甲板系中某点到菲涅尔透镜灯虚像点的高度。其中,实际下滑道高度为甲板系中舰载机到菲涅尔透镜灯虚像点的高度。菲涅尔透镜各层光波束指的是以菲涅尔透镜灯虚像点为原点,菲涅尔透镜灯中的12个瞄准灯分别连线并延长所形成。菲涅尔透镜灯可视范围分为纵向与横向,其纵向计算为当前点在据菲涅尔透镜灯虚像点在甲板系下x坐标绝对值为依据,可看到每个瞄准灯光波束中在甲板系下与菲涅尔虚像点的高度差,横向可视范围为当前点在据菲涅尔透镜灯虚像点在甲板系下x坐标绝对值为依据,在甲板系下与菲涅尔透镜灯虚像点的侧向差。
32.本发明基于一种菲涅尔透镜灯光学助降系统建模仿真方法,通过对航母运动特性的分析,并进一步讨论了菲涅尔透镜灯根据航母运动的稳定控制关系。然后根据航母运动特性模型和菲涅尔透镜灯结构构成,在 matlab/simulink 环境下搭建了模拟菲涅尔透镜灯光学助降系统响应模型,分别考察在着舰过程中时,菲涅尔透镜灯控制稳定性以及菲涅尔透镜灯显示的响应情况,分析舰载机的着舰稳定性。
33.通过计算与仿真,得出了在不接入菲涅尔透镜灯光学助降系统时,在着舰过程中,由于船体的晃动,舰载机在着舰过程中无法精确地进行着舰对准,特别是在夜间和天气不好的情况下,对于飞行员的要求相当高。必须引入菲涅尔透镜灯光学助降系统,从最终的控制响应看出,通过改变菲涅尔透镜灯对舰的俯仰角和滚转角,保证其与舰相对于海面;未加线稳定控制时,虚像点滚转变化角度;若增加线稳定控制,下滑光波束相对于航母的俯仰和滚转运动能保持稳定,但随航母沉浮作垂直运动,这样就保证舰载机着舰时,极大地减小飞机的机动,也减轻驾驶员的操纵负担。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1