一种高效高精度计算刚性点云曲面之间距离的方法与流程
1.本发明属于图像处理技术领域,具体涉及一种高效高精度计算刚性点云曲面之间距离的方法。
背景技术:
2.随着计算机视觉技术尤其是三维立体视觉技术的快速发展,对三维点云测量的需求日益提升。三维点云的应用领域包括车辆自主导航、工业自动化、无人机空间定位等各种领域。由于点云的采集可能源于不同的传感器,因此他们的参考坐标系各不相同,如何将他们的坐标系进行快速统一,对于后续的目标识别、姿态估计具有重大的指导意义。另外,在实际的更加精密要求的工业生产中有时候需要测量同一目标的外形形貌变化情况。然而目前的测量方法仍存在测量精度低、计算复杂度高、误配准等问题,无法满足高精度的测量要求,为后续的工业生产带来严重的安全隐患,因此急需一种快速的高精度的点云曲面距离计算方法。
3.点云曲面的距离测量设计的主要技术有点云配准和点云计算。在点云配准方面,目前常用方式是将两个刚性点云进行配准,常用的点云配准经常icp迭代进行点云配准,由于icp迭代以欧式距离作为优化的目标,未考虑点云中点分布的不确定度,因此可能导致配准的精度不够理想。此外,由于测量点云和目标点云并非完全一致,某些位置存在形貌变化,会导致配准精度下降。测量点云存在大量的测量噪声,这也会对配准造成干扰,导致配准陷入局部解,甚至无法收敛。最后,优化方法对于初始化的角度和位置的具有严格的要求,大范围的角度和位置变化会导致配准失败。
4.在点云测量方面,现有的方法多适用于同一点云密度,对于目标点云较为稀疏的情况测量精度会下降。另外,点云测量仅依据目标点云和测量点云的最近对应点的距离,测量的精度低,无法满足更高精度的要求。
5.中国发明专利,公开号为cn107123134a,专利名称为一种基于特征的危岩体滑坡监测方法,公开了一种局部曲面拟合法的点云数据形变量计算方法,采用通用的局部平面拟合方法,形变量确定是通过计算参考点云数据中的点与圆柱体内待测点云数据的重心点之间的距离。
6.中国发明专利,公开号为cn113160129a,专利名称为组合式精简点云数据的快速配准方法,公开了通过非边界点高斯曲率判断特征区域和非特征区域,后通过非特征区域的pca粗配准和icp精配准。
7.中国发明专利,公开号为cn113205486a,专利名称为基于三维点云的表面缺陷检测方法、装置及存储介质,公开了共面四点的粗配准的改进方法,但并未对icp精匹配进行优化。
8.但上述专利并不能实现高精度计算刚性点云曲面之间距离。
技术实现要素:
9.为解决现有技术中存在的技术问题,本发明的目的在于提供一种高效高精度计算刚性点云曲面之间距离的方法。
10.为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
11.一种高效高精度计算刚性点云曲面之间距离的方法,包括以下步骤:
12.s1、点云区域划分
13.对点云进行区域划分,得到磨损区域的点云和非磨损区域的点云;对点云进行处理,得到纯净的待测点云;
14.s2、点云与参考点云配准
15.通过改进的基于点云不确定度的icp迭代配准将非磨损区域的点云和参考点云进行高精度配准:利用非磨损区域的点云的不确定系数和不确定度,对icp迭代的点云欧式距离进行加权求和,从而降低噪声点对配准的干扰,提高配准精度;
16.s3、通过高精度点云间曲面距离计算,最终获取点云曲面之间的距离。
17.步骤s2中,所述改进的基于点云不确定度的icp迭代配准中,将点云进行降采样2
l
倍,作为迭代的初始值,并将每次进行的降采样2i倍的待测点云和参考点云均进行保存,随着迭代的过程,每10*i迭代采用2
l-i
降采样结果作为配准的点云集合,直到恢复实际的点云集合大小,以加速点云配准时间,同时,在每次迭代过程中,剔除置信度低的噪声,提高配准精度。
18.进一步的,在改进的基于点云不确定度的icp迭代配准中,在第10*j次迭代过程中,待测非磨损区域的点云表示为其中,
19.设点云的总数为n,则降采样后的点云总数为n/2
(l-j)
;
20.非磨损区域的参照点云表示为q={qi},其中,
21.进一步的,在改进的基于点云不确定度的icp迭代配准中,在每次迭代过程中,确定非磨损区域的待配准点云的不确定度,可靠点的置信度高,噪声因置信度低而被剔除,得到点云欧式距离为:
[0022][0023]
tf=[rf|tf]=arg min e(rf|tf)
[0024]
其中,qj是相对应的最近点;∑k表示由不确定度组成的协方差矩阵;rf、tf分别表示每次icp迭代配准中获取的最佳旋转矩阵和平移矩阵,均通过求解公式e(r|t)的最小值获得。
[0025]
进一步的,非磨损区域的待配准点云的不确定度采用以下步骤得到:
[0026]
通过最远点采样法对非磨损区域的点云进行点云采样,获得距离点云表面最近的k个关键点qk;
[0027]
通过ransac方式从待配准点云上选择任意两个点,并分别计算所述两个点与关键点qk的单元向量,所得两个单元向量的交点为点u
k,i
,重复上述步骤n遍,得到不确定点集合{u
k,i
|i=1,...,n},进而得到不确定系数:
[0028][0029]
其中,q表示非磨损区域的参照点云的点云集合q的其中一点,ρ表示信任性阈值,不确定点集的单元向量越接近,不确定度的系数越大,置信度越高;
[0030]
进而得到关键点qk的三维空间分布,得到关键点qk的均值uk及不确定度
[0031][0032][0033]
步骤s3中,将待测点云和参考点云进行点云投影,计算投影后待测点云邻域对应的参照点云的相关点的索引;通过索引值计算邻域参照点云的局部平面法向量,从而得到待测点云到参照曲面距离测量结果;通过移动最小二乘算法和点云重采样去除剩余点云噪声,获取高精度的三维点云曲面的点云。
[0034]
步骤s3中,高精度磨损的测量具体包括以下步骤:
[0035]
(1)获取邻域相关点的索引集:
[0036]
将磨损区域待测点云和参照区域点云沿高度方向投影为二维点云,将投影后的待测磨损点作为中心点,以r为半径查找左右参照磨损区域点云的所有点,并储存对应的索引结合;
[0037]
(2)确定参照点云平面法向量;根据二维参照点点集q
′i对应的索引集合i,获得相应的qi={q
ij
},q
ij
∈r3×
l
,l表示点集q
′i的长度;采用ransac算法进行平面拟合对应的法向量s=[ai,bi,ci]
t
,满足ransac算法的对应点集为,满足ransac算法的对应点集为l’表示点集的集合长;
[0038]
(3)计算两个点云的曲面之间的距离:
[0039]
计算邻域拟合点集的质心点,则曲面距离表示为待测区域点到过质心、平面法向量为s的平面的距离;
[0040]
计算点集的质心点则点云平面之间的距离di表示为待测磨耗点pi到过质心点平面法向量为s的平面的距离:
[0041][0042]
[0043][0044]
其中,和分别表示点pi的三个分量,和分别表示质心点的三个分量;ai、bi、ci分别表示拟合局部平面法向量s的三个分量,通过局部平面的ransac平面拟合获得;li表示通过质心的平面方程,di表示计算所得两个曲面之间的距离,通过拟合局部平面实现;
[0045]
(4)点云重采样和平滑:
[0046]
应用移动最小二乘法进行点云平滑,并进行点云重采样,从而获取最终的两个点云的曲面之间的距离。
[0047]
与现有技术相比,本发明的有益效果为:
[0048]
本发明公开了一种高效高精度计算刚性点云曲面之间距离的方法,包括以下步骤:s1、点云区域的划分:对点云进行区域划分,得到磨损区域和非磨损区域;对待测点云进行处理,得到纯净的待测点云;s2、待测点云和参考点云的配准:将非磨损区域待测点云和参考点云进行基于点云不确定度的icp迭代配准方法的刚性配准,获取非磨损区域待测点云的不确定系数和不确定度;s3、通过高精度磨损测量,最终获取点云曲面之间的距离。本发明提供的高效高精度计算刚性点云曲面之间距离的方法,解决了以下三个问题:第一,解决在测量点云和目标点云存在形貌差别的情况下如何进行高精度的配准问题;第二,解决在测量点云和目标点云进行配准时如何保证配准不陷入局部解并达到全局最优的问题;第三,解决目前点云测量中测量精度低,无法满足高精度测量的问题。
附图说明
[0049]
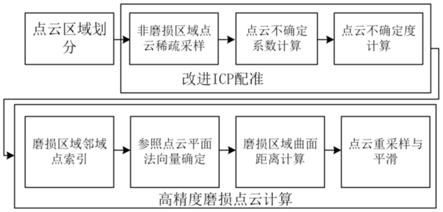
图1为本发明的流程图。
具体实施方式
[0050]
下面结合对本发明进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0051]
以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
[0052]
如图1所示,一种高效高精度计算刚性点云曲面之间距离的方法,包括以下步骤:
[0053]
s1、点云区域的划分:对点云进行区域划分,得到磨损区域的点云和非磨损区域的点云。待测点云通过半径点云分割,去除了大部分的噪声点云,ransac局部曲面拟合,获取较为纯净的待测点云。
[0054]
s2、待测点云和参考点云的配准:通过将非磨损区域待测点云和参考点云进行基于点云不确定度的icp迭代配准的方法刚性配准,配准采用改进的icp迭代配准,主要改进如下:
[0055]
a、将点云进行降采样2
l
倍,作为迭代的初始值,并将每次进行的降采样2i倍的待测
点云和参考点云均进行保存。随着迭代的过程,每10*i迭代采用2
l-i
降采样结果作为配准的点云集合,直到恢复实际的点云集合大小。这样做的好处是可以加速点云配准的时间,降低不必要的冗余计算量,从而减少计算复杂度;
[0056]
b、基于点云不确定度的icp点云配准,每次迭代过程中,我们要确定待匹配点云的不确定度,可靠点的置信度高,而噪声点由于置信度低将予以去除,从而提高最终匹配结果的精度和稳定性。
[0057]
步骤s2具体包括以下步骤:
[0058]
(1)在icp迭代中,根据上述改进a,在第10*j次迭代过程中,待测非磨损区域点云表示为其中,其中,点云的总数为n,那么降采样后的点云总数为n/2
(l-j)
。同理,非磨损区域的参照点云表示为为q={qi},其中,
[0059]
(2)根据改进b对icp优化目标函数的欧式距离进行改进如下:
[0060][0061]
tf=[rf|tf]=arg min e(rf|tf)
[0062]
其中,qj是相对应的最近点;∑k表示由不确定度组成的协方差矩阵;rf、tf分别表示每次icp迭代配准中获取的最佳旋转矩阵和平移矩阵,均通过求解公式e(r|t)的最小值获得;
[0063]
(3)计算不确定度
[0064]
通过最远点采样法对待配准点云进行点云采样,获得距离点云表面最近的k个关键点qk;通过ransac的方式从待配准点云上选择任意两个点,并计算两个点与对应关键点qk的单元向量,并获得两个向量的交点为点u
k,i
,重复n遍可得到不确定点集合{u
k,i
|i=1,...,n},进而得到该点的不确定系数:
[0065][0066]
其中,q表示非磨损区域的参照点云的点云集合q的其中一点,ρ表示信任性阈值,因此该函数是指示性函数,不确定点集的单元向量越接近,不确定度的系数越大,可信度越高;
[0067]
因此,我们可得到关键点qk的三维空间分布,得到该点的均值uk及不确定度:
[0068]
[0069][0070]
通过改进b可有效提升点云的配准精度。
[0071]
s3、高精度磨损的测量,计算点云间曲面的距离。利用待测点云z轴表示高度方向,将待测点云和参考点云进行点云投影,计算投影后待测点云邻域对应的参照点云的相关点的索引;然后,通过索引值计算邻域参照点云的局部平面法向量,从而得到待测点云到参照曲面距离测量结果;最后,通过移动最小二乘算法和点云重采样去除剩余点云噪声,获取高精度的三维点云曲面的点云。
[0072]
步骤s3具体包括以下以下步骤:
[0073]
(1)获取邻域相关点的索引集。将待测磨损区域点云和参照区域点云沿高度方向投影为二维点云,将投影后的待测磨损点作为中心点,以r为半径查找左右参照磨损区域点云的所有点,并储存对应的索引结合;
[0074]
(2)确定参照点云平面法向量;根据二维参照点点集q
′i对应的索引集合i,获得相应的qi={q
ij
},q
ij
∈r3×
l
,l表示点集q
′i的长度;采用ransac算法进行平面拟合对应的法向量s=[ai,bi,ci]
t
,满足ransac算法的对应点集为,满足ransac算法的对应点集为l’表示点集的集合长;
[0075]
(3)计算两个点云的曲面之间的距离。计算邻域拟合点集的质心点,则曲面距离可以表示为待测区域点到过质心,平面法向量为s的平面的距离。计算点集的质心点则点云平面之间的距离di表示为待测磨耗点pi到过质心点平面法向量为s的平面的距离:
[0076][0077][0078][0079]
其中,和分别表示点pi的三个分量,和分别表示质心点的三个分量;ai、bi、ci分别表示拟合局部平面法向量s的三个分量,通过局部平面的ransac平面拟合获得;li表示通过质心的平面方程,di表示计算所得两个曲面之间的距离,通过拟合局部平面实现;
[0080]
(4)点云重采样和平滑。由于噪声点云导致待测点云的法向量方向不一致,所以应用移动最小二乘法进行点云平滑,并进行点云重采样,从而获取最终的两个点云的曲面之间的距离。
[0081]
与公开号cn107123134a的发明专利相比,本发明的局部平面拟合是通过z方向投影后根据半径来确定的,采用不同的形变量确定方法,先确定待测点云到通过参考点云的
局部平面,该平面通过投影半径内点云的质心,法向量参数等于参考点云投影半径内点拟合的平面的法向量参数。本发明对于点云曲面的距离测量的改进主要在点云配准和点云计算。
[0082]
本发明未具体描述的部分或结构采用现有技术或现有产品即可,在此不做赘述。
[0083]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1