一种托卡马克仓内立体相机延拓接力标定的方法及系统
1.本发明涉及机器视觉技术领域,尤其是指一种托卡马克仓内立体相机延拓接力标定的方法及系统。
背景技术:
2.可控核聚变是人类解决能源问题的终极途径,而托卡马克是最有可能实现商业化的可控核聚变装置。托卡马克的主体结构是一个封闭的环形真空室,外面缠绕着通电线圈。装置运行时,通入真空内的核聚变原料被加热到上亿度,处于等离子体态,而后将会被线圈产生的螺旋形磁场束缚在真空室内,进行聚变反应。目前正在建造的最大的托卡马克是位于法国的iter装置,由中国、欧盟、美国、俄罗斯、日本、韩国和印度七方共同设计建造。在这一领域,我国处于世界相对领先水平。目前已经设计建造了全超导托卡马克east,取得了1亿度芯部等离子体电子温度和超过400秒的长脉冲放电等一系列让世界瞩目的成果。科研人员发现,托卡马克装置运行时会产生大量的尘埃。随着放电参数的提高,这些尘埃的影响越来越严重,例如直接导致放电的终止、损坏其他的诊断设备、甚至会引发爆炸等严重后果。由于托卡马克内部极高的温度、复杂的环境和变化迅速的物理量,方便直观的原位光学诊断,在聚变灰尘的研究中将发挥越来越重要的作用。目前国外的textor、nstx、mast、asdex-u等托卡马克内部都安装了由两台同步高速相机组成的立体相机系统,用以观察托卡马克运行过程中产生的灰尘。立体相机系统可以实现对灰尘位置的三维重建,从而获取灰尘的动力学信息。
3.由于有限的空间分辨率、像素的物理尺寸、镜头畸变等不可避免的因素,立体相机总会存在系统误差。最新研究结果显示,立体相机在参考点附近的区域三维重建精度较高,而远离参考点的区域误差较大。如图1所示为现有托卡马克内仓的标定方案的结构示意图,其中,图1(a)为托卡马克俯视示意图,在托卡马克中,现有的立体相机的标定方法只能从器壁上选择一些参考点,图1(b)为托卡马克内部实拍图,其能够表示图1(a)中的观测区域,图1(b)中的x标记表示器壁上的一些参考点位置。
4.现有技术中,仅靠器壁上参考点进行相机标定,会导致其他区域的三维重建误差较大。目前国际上均采用此种方案进行标定,最佳精度仅为2cm,这种精度无法为托卡马克物理机制分析提供可靠有效的实验数据,因此,目前的托卡马克物理研究需要对内仓全空间实现的高精度三维重建。
技术实现要素:
5.为此,本发明所要解决的技术问题在于克服现有技术中托卡马克仓内三维重建精度差,无法为托卡马克物理机制分析提供可靠有效的实验数据的技术缺陷。
6.为解决上述技术问题,本发明提供了一种托卡马克仓内立体相机延拓接力标定的方法,包括以下步骤:
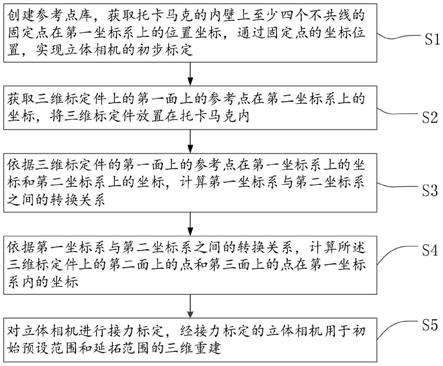
7.s1、创建参考点库,获取托卡马克的内壁上至少四个不共线的固定点在第一坐标
系上的位置坐标,将所述固定点在第一坐标系上的位置坐标作为参考点库中第一批参考点,通过参考点的坐标位置实现立体相机的初步标定,其中,所述初步标定的相机用于托卡马克器壁附近的初始预设范围内的三维重建,所述第一坐标系为托卡马克自带的坐标系;
8.s2、提供三维标定件,获取三维标定件上的第一面上的参考点在第二坐标系上的坐标,其中,所述第二坐标系为三维标定件自带的坐标系;
9.将所述三维标定件放置在托卡马克内,其中,所述三维标定件的第一面位于托卡马克器壁附近的初始预设范围内,使用s1中已经标定好的立体相机,获取三维标定件的第一面上的参考点在第一坐标系内坐标;
10.s3、依据第一面上的参考点在第一坐标系上的坐标和第二坐标系上的坐标,计算第一坐标系与第二坐标系之间的转换关系;
11.s4、依据第一坐标系与第二坐标系之间的转换关系,计算所述三维标定件上的第二面上的点和第三面上的点在第一坐标系内的坐标;
12.s5、将三维标定件上第一面上的参考点在第一坐标内的坐标、第二面上的点和第三面上的点在第一坐标系内的坐标加入参考点库,利用参考点库内的参考点对立体相机进行接力标定,经接力标定的立体相机用于初始预设范围和延拓范围的三维重建。
13.作为优选的,所述s5之后还包括:
14.s6、将所述三维标定件朝向目标观测区域移动,使得三维标定件的第一面位于s5的延拓范围内;
15.s7、将s5中标定的立体相机用于获取s6中三维标定件第一面在第一坐标系内的位置坐标,重复s3-s6,充实参考点库,直至参考点库内的参考点遍布目标观测区域,将所述参考库内的所有参考点用于立体相机的最终标定。
16.作为优选的,所述目标观测区域为立体相机相机在托卡马克仓内的视野范围。
17.作为优选的,所述s1中,所述初始预设范围小于等于10cm。
18.作为优选的,所述三维标定件包括互相垂直的第一面、第二面和第三面。
19.作为优选的,所述第一面、第二面和第三面上皆设置有棋盘图案。
20.作为优选的,所述延拓范围为三维标定件占据的长方体空间。
21.作为优选的,所述立体相机延拓接力标定的方法应用在立体相机的拍摄中。
22.本发明还公开了一种托卡马克仓内立体相机延拓接力标定系统,包括:
23.初步标定模块,所述初步标定模块用于创建参考点库,获取托卡马克的内壁上至少四个不共线的固定点在第一坐标系上的位置坐标,将所述固定点在第一坐标系上的位置坐标作为参考点库中第一批参考点,通过参考点的坐标位置实现立体相机的初步标定,其中,所述初步标定的相机用于托卡马克器壁附近的初始预设范围内的三维重建,所述第一坐标系为托卡马克自带的坐标系;
24.参考点获取模块,所述参考点获取模块用于提供三维标定件,获取三维标定件上的第一面上的参考点在第二坐标系上的坐标,其中,所述第二坐标系为三维标定件自带的坐标系,将所述三维标定件放置在托卡马克内,其中,所述三维标定件的第一面位于托卡马克器壁附近的初始预设范围内,使用s1中已经标定好的立体相机,获取三维标定件的第一面上的参考点在第一坐标系内坐标;
25.坐标系转换计算模块,所述坐标系转换计算模块依据第一面上的参考点在第一坐
标系上的坐标和第二坐标系上的坐标,计算第一坐标系与第二坐标系之间的转换关系;
26.计算模块,所述计算模块依据第一坐标系与第二坐标系之间的转换关系,计算所述三维标定件上的第二面上的点和第三面上的点在第一坐标系内的坐标;
27.接力标定模块,所述接力标定模块将三维标定件上第一面上的参考点在第一坐标内的坐标、第二面上的点和第三面上的点在第一坐标系内的坐标加入参考点库,利用参考点库内的参考点对立体相机进行接力标定,经接力标定的立体相机用于初始预设范围和延拓范围的三维重建。
28.作为优选的,还包括:
29.多次延拓标定模块,所述多次延拓标定模块用于将所述三维标定件朝向目标观测区域移动,使得三维标定件的第一面位于延拓范围内;将标定的立体相机用于获取三维标定件第一面在第一坐标系内的位置坐标,重复参考点获取模块、坐标系转换计算模块、计算模块和接力标定模块的工作,充实参考点库,直至参考点库内的参考点遍布目标观测区域,将所述参考库内的所有参考点用于立体相机的最终标定。
30.本发明的上述技术方案相比现有技术具有以下优点:
31.1、在托卡马克中立体相机标定过程中,参考点的选择受到很大的限制,而本发明提供的方法彻底突破了这一制约,通过本发明的标定空间延拓接力的方法,可以将立体相机观测的区域都参与相机的标定工作,从而实现立体相机进行三维重建时的全空间精确三维重建。
32.2、本发明中,使用立体相机本身代替悬臂式三维激光扫描仪,作为连接托卡马克坐标系和标定件坐标系的测量工具。
附图说明
33.图1为现有托卡马克内仓的标定方案的结构示意图,其中,(a)为托卡马克俯视图,(b)为托卡马克内部实拍图;
34.图2为本发明延拓接力标定的方法的流程图;
35.图3为本发明在托卡马克实现立体相机标定的示意图,其中,(a)为本发明托卡马克内仓的结构示意图;(b)为(a)在器壁标定区域的局部放大图;(c)为三维标定件的结构示意图。
具体实施方式
36.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
37.参照图2-图3所示,本发明公开了一种托卡马克仓内立体相机延拓接力标定的方法,包括以下步骤:
38.步骤一、创建参考点库,获取托卡马克的内壁上至少四个不共线的固定点在第一坐标系上的位置坐标,将所述固定点在第一坐标系上的位置坐标作为参考点库中第一批参考点,通过参考点的坐标位置实现立体相机的初步标定,其中,所述初步标定的相机用于托卡马克器壁附近的初始预设范围内的三维重建,所述第一坐标系为托卡马克自带的坐标系。作为优选的,所述初始预设范围小于等于10cm。
39.步骤二、提供三维标定件,获取三维标定件上的第一面上的参考点在第二坐标系上的坐标,其中,所述第二坐标系为三维标定件自带的坐标系。
40.将所述三维标定件放置在托卡马克内,其中,所述三维标定件的第一面位于托卡马克器壁附近的初始预设范围内,使用步骤一中已经标定好的立体相机,获取三维标定件的第一面上的参考点在第一坐标系内坐标。
41.具体的,所述三维标定件包括互相垂直的第一面、第二面和第三面。所述第一面、第二面和第三面上皆设置有棋盘图案。
42.步骤三、依据第一面上的参考点在第一坐标系上的坐标和第二坐标系上的坐标,计算第一坐标系与第二坐标系之间的转换关系。
43.步骤四、依据第一坐标系与第二坐标系之间的转换关系,计算所述三维标定件上的第二面上的点和第三面上的点在第一坐标系内的坐标。
44.步骤五、将三维标定件上第一面上的参考点在第一坐标内的坐标、第二面上的点和第三面上的点在第一坐标系内的坐标加入参考点库,利用参考点库内的参考点对立体相机进行接力标定,经接力标定的立体相机用于初始预设范围和延拓范围的三维重建。具体的,延拓范围为三维标定件占据的长方体空间。
45.步骤六、将所述三维标定件朝向目标观测区域移动,使得三维标定件的第一面位于步骤五的延拓范围内。
46.步骤七、将步骤五中标定的立体相机用于获取步骤六中三维标定件第一面在第一坐标系内的位置坐标,重复步骤三至步骤六,充实参考点库,直至参考点库内的参考点遍布目标观测区域,将所述参考库内的所有参考点用于立体相机的最终标定。
47.其中,所述目标观测区域为立体相机相机在托卡马克仓内的视野范围。
48.本发明公开了一种托卡马克仓内立体相机延拓接力标定系统,包括初步标定模块、参考点获取模块、坐标系转换计算模块、计算模块和接力标定模块。
49.所述初步标定模块用于创建参考点库,获取托卡马克的内壁上至少四个不共线的固定点在第一坐标系上的位置坐标,将所述固定点在第一坐标系上的位置坐标作为参考点库中第一批参考点,通过参考点的坐标位置实现立体相机的初步标定,其中,所述初步标定的相机用于托卡马克器壁附近的初始预设范围内的三维重建,所述第一坐标系为托卡马克自带的坐标系。
50.所述参考点获取模块用于提供三维标定件,获取三维标定件上的第一面上的参考点在第二坐标系上的坐标,其中,所述第二坐标系为三维标定件自带的坐标系,将所述三维标定件放置在托卡马克内,其中,所述三维标定件的第一面位于托卡马克器壁附近的初始预设范围内,使用s1中已经标定好的立体相机,获取三维标定件的第一面上的参考点在第一坐标系内坐标。
51.所述坐标系转换计算模块依据第一面上的参考点在第一坐标系上的坐标和第二坐标系上的坐标,计算第一坐标系与第二坐标系之间的转换关系。
52.所述计算模块依据第一坐标系与第二坐标系之间的转换关系,计算所述三维标定件上的第二面上的点和第三面上的点在第一坐标系内的坐标。
53.所述接力标定模块将三维标定件上第一面上的参考点在第一坐标内的坐标、第二面上的点和第三面上的点在第一坐标系内的坐标加入参考点库,利用参考点库内的参考点
对立体相机进行接力标定,经接力标定的立体相机用于初始预设范围和延拓范围的三维重建。
54.所述多次延拓标定模块用于将所述三维标定件朝向目标观测区域移动,使得三维标定件的第一面位于延拓范围内;将标定的立体相机用于获取三维标定件第一面在第一坐标系内的位置坐标,重复参考点获取模块、坐标系转换计算模块、计算模块和接力标定模块的工作,充实参考点库,直至参考点库内的参考点遍布目标观测区域,将所述参考库内的所有参考点用于立体相机的最终标定。
55.下面,结合具体实施例对本发明的技术方案做进一步说明与解释。
56.本发明致力于,通过接力标定的方式,完成参考点的全区域遍历,从而实现托卡马克内仓全空间的高精度三维重建。
57.本发明的技术方案:首先,通过现有的技术,在托卡马克器壁附近的区域完成立体相机的标定工作,然后再将标定区域延拓至整个观测区域,具体步骤如下。
58.1、创建参考点库,获取托卡马克器壁上一些已知固定点位的位置坐标(xi,yi,zi),x-y-z坐标系为托卡马克坐标系,i为所选固定点的编号,将(xi,yi,zi)作为参考点库中第一批参考点,以此实现相机在托卡马克器壁附近的标定。
59.2、将三维标定件放置在托卡马克内,其中一面背靠贴近1中所选的固定点位,利用1中标定好的立体相机,获取标定件这一面上点位的坐标(xj,yj,zj),j为标定件上点的编号。
60.3、获取标定件上j点位在三维标定件下的坐标(xj,yj,zj)。
61.4、依据j点在托卡马克坐标系x-y-z下的坐标(xj,yj,zj)与在标定件下的坐标(xj,yj,zj),计算两套坐标系的转换关系。
62.5、依据4中转换关系,计算标定件上其他两面上的点位在托卡马克坐标系x-y-z下的三维坐标(xk,yk,zk),k为标定件上其他两面的点位编号。
63.6、将4中的(xj,yj,zj)和5中的(xk,yk,zk)加入参考点库,利用参考点库内的参考点对相机再次进行标定,至此,通过标定件的接力作用,已将相机标定点选择的区域,也就是可以高精度三维重建的区域由器壁延拓至标定件涵盖的空间。
64.7、根据观测区域需要,以6中已延拓的高精度空间为基础,再移动三维定标件,重复上述第2至6步,充实标定点库,使得高精度空间进一步延拓,直至需求的范围。
65.托卡马克中立体相机标定过程中,参考点的选择受到很大的限制,而本发明提供的方法彻底突破了这一制约。通过本发明的标定空间延拓接力的方法,可以将立体相机观测的区域都参与相机的标定工作,从而实现立体相机进行三维重建时的全空间精确三维重建。
66.在步骤6中,利用已获得格点的坐标和标定件上各个格点的位置关系来确定标定件上其他格点坐标的方法,本质上就是解决两套三维直角坐标系的转换关系,其中一套是托卡马克坐标,一套是标定件坐标。这一步骤可以使用matlab、python等科学计算工具来实现。具体代码可参见https://blog.csdn.net/lzp_k2/article/details/83094962。
67.本发明在托卡马克中设置精确的固定点位,而不是使用螺杆等作为立体相机第一步标定的参考点;并且,本发明使用的立体相机本身代替悬臂式三维激光扫描仪,作为连接托卡马克坐标系和标定件坐标系的测量工具。
68.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
69.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
70.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
71.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
72.显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1