基于参考图像来确定样本中的缺陷和/或边缘粗糙度的制作方法
1.当前公开的主题总体涉及样本检验领域,并且更具体地涉及自动化对样本的检验。
背景技术:
2.当前对与所制造的器件的超大规模集成相关联的高密度和高性能的需求要求亚微米特征、提高的晶体管和电路速度以及提高的可靠性。这种需求要求形成具有高精确度和高均匀性的器件特征,这又使得必需仔细地监测制造工艺,包括在器件仍然呈半导体晶片的形式时自动化检验器件。
3.在半导体制造期间的各种步骤处使用了检验工艺来检测样本上的缺陷并且对其进行分类。可通过(多个)工艺的自动化(例如,自动化缺陷分类(adc)、自动化缺陷查验(adr)等)来提高检验效力。
技术实现要素:
4.根据当前公开的主题的某些方面,提供了检验半导体样本的系统,所述系统包括处理器和存储器电路系统(pmc),所述处理器和存储器电路系统(pmc)被配置为:获得所述半导体样本的分段图像,所述图像包括第一结构元素;获得所述半导体样本的参考图像,所述参考图像是基于设计数据并且包括第二结构元素;对于包括第一结构元素和对应的第二结构元素的至少一对元素,确定提供为了根据匹配标准使所述对的元素匹配所需的空间变换的信息的数据d
空间
;以及至少使用d
空间
来确定提供所述第一结构元素中的缺陷的信息的数据和提供所述第一结构元素的边缘粗糙度的信息的数据中的至少一者。
5.根据一些实施例,所述系统被配置为对于所述至少一个对,确定提供在向所述第二结构元素的多个像素应用相同空间变换之后的对应于所述第二结构元素的经校正的元素的信息的数据。
6.根据一些实施例,所述空间变换包括平移和扩张中的至少一者。
7.根据一些实施例,所述系统被配置为:确定表示所述空间变换的幅值的数据d
幅值
,其中相同空间变换适用于所述对的元素的像素;并且至少基于d
幅值
来确定提供所述第一结构元素中的缺陷的信息的数据。
8.根据一些实施例,所述系统被配置为对于所述至少一个对:获得提供所述第一结构元素的第一多个像素的位置的信息的数据;获得提供所述第二结构元素的第二多个像素的位置的信息的数据;确定表示在所述第一多个像素与所述第二多个像素之间的对应关系的数据d
对应
;至少基于数据d
对应
,确定提供根据匹配标准使所述第一多个像素的所述位置和所述第二多个像素的所述位置匹配所需的所述空间变换的信息的数据d
空间
。
9.根据一些实施例,d
对应
是基于以下项中的至少一者:所述第一多个像素和所述第二多个像素中的至少一些像素的位置,以及提供所述第一结构元素和所述第二结构元素中的至少一者的局部形状的信息的数据。
10.根据一些实施例,提供所述第一结构元素和所述第二结构元素中的至少一者的局部形状的信息的数据包括:与所述第一结构元素和所述第二结构元素中的至少一者的轮廓正交的方向,以及所述第一结构元素和所述第二结构元素中的至少一者的曲率。
11.根据一些实施例,确定提供空间变换的信息的数据包括使用归因于所述第一多个像素和所述第二多个像素中的至少一些像素的至少一个权重,所述权重基于数据d
对应
来确定。
12.根据一些实施例,所述系统被配置为对于所述至少一个对:对于所述对的所述第一结构元素的多个像素中的每个像素,确定在所述像素与所述对的所述经校正的元素的对应像素之间的距离;并且基于对于多个像素的所述距离的分布,确定提供所述第一结构元素中的缺陷的信息的数据。
13.根据一些实施例,所述系统被配置为对于所述至少一个对:对于所述对的所述第一结构元素的多个像素中的每个像素,确定在所述像素与所述对的所述经校正的元素的对应像素之间的距离;并且基于对于多个像素的所述距离的分布,确定提供所述第一结构元素的边缘粗糙度的信息的数据。
14.根据一些实施例,所述系统被配置为对于多个对中的每一者:确定提供在向所述第二结构元素的多个像素应用相同空间变换之后的对应于所述第二结构元素的经校正的元素的信息的数据;基于以下项中的至少一者来确定所述第一结构元素中存在缺陷的可能性:提供所述空间变换的幅值的信息的数据,以及在所述第一结构元素的像素与所述对的所述经校正的元素的对应像素之间的距离。
15.根据一些实施例,所述系统被配置为:在检测到第一结构元素中的位于第一位置处的缺陷并且检测到第一结构元素中的位于第二位置处的缺陷时,如果在所述第一位置与所述第二位置之间的距离低于阈值,则输出指示对于所述第一位置和所述第二位置两者的单个缺陷的数据。
16.根据当前公开的主题的某些其他方面,提供了检验半导体样本的方法,所述方法包括由处理器和存储器电路系统(pmc):获得所述半导体样本的分段图像,所述图像包括第一结构元素;获得所述半导体样本的参考图像,所述参考图像是基于设计数据并且包括第二结构元素;对于包括第一结构元素和对应的第二结构元素的至少一对元素,确定提供为了根据匹配标准使所述对的元素匹配所需的空间变换的信息的数据d
空间
;以及至少使用d
空间
来确定提供所述第一结构元素中的缺陷的信息的数据和提供所述第一结构元素的边缘粗糙度的信息的数据中的至少一者。
17.根据当前公开的主题的其他方面,所述方法可包括执行如以上参考所述系统所描述的一个或多个操作。
18.根据当前公开的主题的其他方面,提供了非暂时性计算机可读介质,所述非暂时性计算机可读介质包括指令,所述指令在由计算机执行时使所述计算机执行根据所述方法的操作。
19.根据一些实施例,对缺陷的检测可以是基于样本的单个图像。根据一些实施例,可检测各种类型的缺陷。根据一些实施例,提高了缺陷检测的效率和准确性。根据一些实施例,获得提供边缘粗糙度的信息的数据。
附图说明
20.为了理解本发明并且了解本发明在实践中可如何进行,将参考附图借助非限制性示例来描述实施例,在附图中:
21.图1示出了根据当前公开的主题的某些实施例的检验系统的一般化框图。
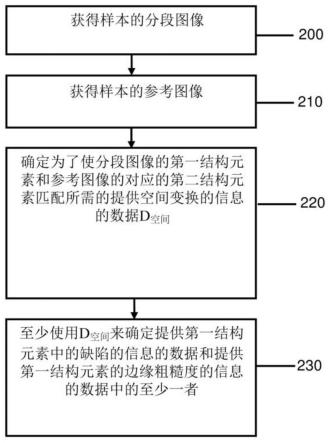
22.图2示出了基于半导体样本的分段图像以及参考图像来确定缺陷和/或提供边缘粗糙度的信息的数据的方法。
23.图2a示出了半导体样本的分段图像的非限制性示例。
24.图2b示出了对半导体样本的参考图像进行聚类的非限制性示例。
25.图2c示出了半导体样本的参考图像的非限制性示例。
26.图3示出了确定使分段图像的第一结构元素和参考图像的第二结构元素匹配所需的空间变换的方法。
27.图3a示出了图3的方法的非限制性示例。
28.图3b示出了图2的方法的具体的实施例。
29.图3c示出了基于图3b的方法的对缺陷的检测的非限制性示例。
30.图4示出了基于分段图像的第一结构元素和参考图像的对应的第二结构元素来确定经校正的元素的方法。
31.图4a示出了图4的方法的非限制性示例。
32.图4b示出了在整个图像上的图4的方法的非限制性示例。
33.图5示出了基于半导体样本的分段图像以及参考图像来确定提供边缘粗糙度和/或缺陷的信息的数据的方法。
34.图5a和图5b示出了图5的方法的非限制性示例。
35.图6示出了基于半导体样本的分段图像以及参考图像来检测缺陷的方法,所述方法将图3b的方法和图5的方法两者组合。
具体实施方式
36.在以下详细描述中,阐述了许多具体细节,以便提供对本公开内容的透彻理解。然而,本领域技术人员将理解,当前公开的主题可在没有这些具体细节的情况下实践。在其他情况下,并未详细地描述所熟知的方法、过程、部件和电路,以免模糊当前公开的主题。
37.除非另外具体地陈述,否则如从以下论述所显而易见的,将了解,贯穿本说明书的论述,利用诸如“获得”、“确定”、“输出”、“使用”、“配准”等术语是指处理器的将数据操纵和/或变换为其他数据的(多个)动作和/或(多个)处理,所述数据被表示为物理(诸如电子)量,和/或所述数据表示物理对象。术语“处理器”涵盖具有可基于存储在存储器(诸如计算机、服务器、芯片、硬件处理器等)中的指令来执行任务的数据处理电路系统的任何计算单元或电子单元。它涵盖了可位于相同地理区中或可至少部分地位于不同区中并且能够一起进行通信的单个处理器或多个处理器。
38.本说明书中使用的术语“样本”应当被广义地解释为涵盖用于制造半导体集成电路、磁头、平板显示器和其他半导体制品的任何种类的晶片、掩模和其他结构、以上项的组合和/或其部分。
39.本说明书中使用的术语“检验”应当被广义地解释为涵盖任何种类的计量相关操
作以及与在样本制造期间对样本中的缺陷的检测和/或分类有关的操作。检验通过在要检验的样本的制造期间或之后使用非破坏性检验工具提供。作为非限制性示例,检验工艺可包括使用相同或不同检查工具进行运行时扫描(以单次扫描或以多次扫描)、采样、查验、测量、分类和/或关于样本或其部分提供的其他操作。同样,检验可在制造要检验的样本之前提供,并且可包括例如生成(多个)检验方案和/或其他设置操作。需注意,除非另外具体地陈述,否则本说明书中使用的术语“检验”或其衍生词在检查区域的分辨率或大小方面不受限制。作为非限制性示例,多种非破坏性检验工具包括扫描电子显微镜、原子力显微镜、光学检查工具等。
40.作为非限制性示例,运行时检验可采用两阶段式过程,例如,先检查样本,再查验潜在缺陷的采样位置。在第一阶段期间,以高速度和相对低的分辨率检查样本的表面。在第一阶段中,产生缺陷图,以示出在样本上高概率有缺陷的可疑位置。在第二阶段期间,以相对高的分辨率更彻底地分析可疑位置中的至少一些。在一些情况下,两个阶段可由相同检查工具实现,并且在一些其他情况下,这两个阶段由不同检查工具实现。
41.本文中使用的术语“非暂时性存储器”和“非暂时性介质”应当被广义地解释为涵盖适合当前公开的主题的任何易失性或非易失性计算机存储器。
42.本说明书中使用的术语“缺陷”应当被广义地解释为涵盖形成在样本上或内的任何种类的异常或不期望的特征。
43.本说明书中使用的术语“设计数据”应当被广义地解释为涵盖指示样本的分层物理设计(布局)的任何数据。设计数据可由相应设计员提供,和/或可从物理设计导出(例如,通过复杂模拟、简单几何和布尔运算等)。设计数据可以以不同格式提供,作为非限制性示例,诸如gdsii格式、oasis格式等。设计数据可以以矢量格式、灰度强度图像格式或以其他方式呈现。
44.未参考任何特定编程语言来描述当前公开的主题的实施例。将了解,可使用多种编程语言来实现如本文所描述的当前公开的主题的教导。
45.本发明设想了可由计算机读取来执行本发明的一种或多种方法的计算机程序。本发明进一步设想了有形地体现可由计算机执行来执行本发明的一种或多种方法的指令程序的机器可读存储器。
46.考虑到这一点,转向图1,示出了根据当前公开的主题的某些实施例的检验系统的功能框图。作为样本制造工艺的部分,可使用图1中示出的检验系统100来检验样本(例如,半导体样本,诸如晶片和/或其部分)。所示出的检验系统100包括基于计算机的系统103,基于计算机的系统103能够使用一个或多个样本的图像来自动地确定计量相关和/或缺陷相关信息。系统103可操作地连接到一个或多个低分辨率检验工具101和/或一个或多个高分辨率检验工具102和/或其他检验工具。检验工具被配置为捕获样本的图像和/或查验(多个)所捕获的图像和/或实现或提供与(多个)所捕获的图像有关的测量。系统103可进一步可操作地连接到cad(计算机辅助设计)服务器110和/或数据存储库109。
47.系统103包括处理器和存储器电路系统(pmc)104。pmc 104被配置为提供操作系统103必需的处理,如在下述各种实施例中进一步描述的,并且包括处理器(未单独地示出)和存储器(未单独地示出)。在图1中,pmc 104可操作地连接到基于硬件的输入接口105和基于硬件的输出接口106。
48.pmc 104的处理器可被配置为根据实现在pmc中包括的非暂时性计算机可读存储器上的计算机可读指令来执行一个或多个功能模块。此类功能模块在下文中被称为包括在pmc中。pmc 104中包括的功能模块包括深度神经网络(dnn)112。dnn 112被配置为使用用于基于样本的图像输出应用相关数据的机器学习网络/机器学习算法来实现数据处理。
49.作为非限制性示例,可根据卷积神经网络(cnn)架构、循环神经网络架构、递归神经网络架构、生成性对抗网络(gan)架构或以其他方式来组织dnn 112的层。可选地,层中的至少一些可被组织在多个dnn子网中。dnn 112的每个层可包括多个基本计算元素(ce),在本领域中,其典型地被称为维度、神经元或节点。
50.一般来讲,给定层的计算元素可与前一层和/或后一层的ce连接。在前一层的ce与后一层的ce之间的每个连接与加权值相关联。给定ce可经由相应连接从前一层的ce接收输入,每个给定连接与可应用于给定连接的输入的加权值相关联。加权值可确定连接的相对强度,并且由此确定相应输入对给定ce的输出的相对影响。给定ce可被配置为计算激活值(例如,输入的加权和),并且通过将激活函数应用于所计算的激活来进一步导出输出。激活函数可以是例如恒等函数、确定性函数(例如,线性、sigmoid、阈值等)、随机函数或其他合适的函数。来自给定ce的输出可经由相应连接传输到后一层的ce。同样地,如上所述,在ce的输出处的每个连接可与可在被接收作为后一层的ce的输入之前应用于ce的输出的加权值相关联。除了加权值外,还可存在与连接和ce相关联的阈值(包括限制函数)。
51.可在训练之前初始地选择dnn 112的加权值和/或阈值,并且可在训练期间进一步迭代地调整或修改所述加权值和/或阈值,以在所训练的dnn 112中实现最佳加权值和/或阈值集。在每次迭代之后,可确定在由dnn 112产生的实际输出和与相应数据训练集相关联的目标输出之间的差值(也被称为损失函数)。所述差值可被称为误差值。当指示误差值的成本或损失函数小于预定值时,或者当迭代之间的性能上的受限改变被实现时,可确定训练已经完成。可选地,在训练整个dnn 112之前,可单独地训练dnn子网(如果有的话)中的至少一些。
52.系统103被配置为经由输入接口105接收输入数据,所述输入数据可包括由检验工具产生的数据(和/或其衍生物和/或与其相关联的元数据)和/或产生和/或存储在一个或多个数据存储库109和/或cad服务器110和/或其他相关数据存储库中的数据。需注意,输入数据可包括图像(例如,所捕获的图像、从所捕获的图像导出的图像、模拟图像、合成图像等)和相关联标量数据(例如,元数据、人为属性等)。需进一步注意,图像数据可包括与感兴趣层和/或与样本的一个或多个其他层有关的数据。
53.在处理输入数据(例如,低分辨率图像数据和/或高分辨率图像数据,可选地连同其他数据(例如,设计数据、合成数据等)一起)后,系统103可经由输出接口106将结果(例如,指令相关数据123和/或124)发送到(多个)检验工具中的任一者,将结果(例如,缺陷属性、缺陷分类等)存储在存储系统107中,经由gui 108渲染结果,和/或将结果发送到外部系统(例如,fab的收率管理系统(yms))。gui 108可被进一步配置为实现与系统103有关的用户指定输入。
54.作为非限制性示例,可由一个或多个低分辨率检验机器101(例如,光学检查系统、低分辨率sem等)检验样本。提供样本的低分辨率图像的信息的所得数据(低分辨率图像数据121)可直接地或经由一个或多个中间系统传输到系统103。替代地或附加地,可由高分辨
率机器102检验样本(例如,可由扫描电子显微镜(sem)或原子力显微镜(afm)查验被选择用于查验的潜在缺陷位置的子集)。提供样本的高分辨率图像的信息的所得数据(高分辨率图像数据122)可直接地或经由一个或多个中间系统传输到系统103。
55.要注意,图像数据可连同与其相关联的元数据(例如,像素大小、缺陷类型的文本描述、图像捕获过程的参数等)一起被接收和处理。
56.本领域技术人员将容易地了解,当前公开的主题的教导不受图1中示出的系统束缚;等同和/或经修改的功能可以另一种方式合并或划分,并且可实现在软件与固件和/或硬件的任何适当组合中。
57.在不以任何方式限制本公开内容的范围的情况下,还应当注意,检验工具可被实现为各种类型的检查机器,诸如光学成像机器、电子束检查机器等。在一些情况下,同一检验工具可提供低分辨率图像数据和高分辨率图像数据。在一些情况下,至少一个检验工具可具有计量能力。
58.要注意,图1中示出的检验系统可实现在分布式计算环境中,其中图1中示出的前述功能模块可跨若干本地和/或远程装置分布,并且可通过通信网络链接。需进一步注意,在另一个实施例中,检验工具101和/或102、数据存储库109、存储系统107和/或gui 108中的至少一些可在检验系统100外部并且以经由输入接口105和输出接口106与系统103的数据通信进行操作。系统103可被实现为(多个)独立计算机,以结合检验工具使用。替代地,系统的相应功能可至少部分地与一个或多个检验工具集成。
59.现在将注意力转向图2。一种方法包括获得(附图标记200)样本的分段图像(例如,从样本的区域)。图2a中提供了分段图像280的非限制性示例。如在图2a中可见,分段图像280包括多个第一结构元素(281)。结构元素包括(所提供的示例不是限制性的)栅极、晶体管、触点,或者这些元素的部分。结构元素的性质和/或形状在图像中可不同。
60.根据一些实施例,分段图像已经是可用的,并且例如从数据库或从任何适当源获得。根据一些实施例,操作200可包括执行样本的图像的分段。这可包括将样本的图像分段为属于同一对象的像素组,由此识别对应于不同结构元素的连续区域。
61.所述方法包括获得(附图标记210)半导体样本的参考图像。图2b中提供了参考图像285的非限制性示例。参考图像包括第二结构元素286。参考图像是样本(例如,管芯、单元等)的参考区域的图像,其中相应图像数据经验证为表示没有缺陷和工艺变化的参考区域。换句话说,此图像可被视为模型/参考。有许多方式来生成参考图像。根据一些实施例,参考图像基于设计数据来生成。根据一些实施例,可使用cad数据模拟参考图像。根据一些实施例,参考图像可对应于被用户验证为没有缺陷和工艺变化的分段图像。这些方法不是限制性的。
62.分段图像可与参考图像相当(例如,管芯到数据库等),并且提供半导体样本的区域的信息。分段图像应当提供与区域相关联的多个缺陷的信息。区域被配置为满足关于参考区域的相似性标准,并且可属于相同或不同半导体样本。例如,相似性标准可定义例如区域和参考区域对应于相同物理部件或对应于半导体样本的类似区(例如,类似管芯、单元等)。
63.需注意,为了确保在图像之间的兼容性,至少一个分段图像(或已经从其生成分段图像的图像)和参考图像可经历配准过程。
64.假设给定元素对包括分段图像的第一结构元素和参考图像的对应的第二结构元素。一般来讲,对于给定对,第二结构元素表示第一结构元素的所期望的形状,或至少表示这种所期望的形状的良好近似。
65.给定元素对的识别可包括例如将不同的第一结构元素聚类成包括具有类似形状的结构元素的群集。相同工艺可应用于参考图像。图2c中提供了示意性示例,其中已经识别了四个不同集群。
66.基于这种聚类,以及基于第一结构元素和第二结构元素在它们相应的图像中的位置,可识别多个元素对,每个元素对包括分段图像的第一结构元素和参考图像的对应的第二结构元素。
67.返回到图2的方法,所述方法可包括对于包括第一结构元素和对应的第二结构元素的至少一对元素,确定(操作220)提供为了根据匹配标准使所述对的元素匹配所需的空间变换的信息的数据d
空间
。匹配标准可包括例如元素应当以小于阈值的差异(如果这种情况可能的话)匹配,或者元素应当尽可能匹配。以下提供了用于确定d
空间
的各种实施例。
68.根据一些实施例,所述方法进一步包括对于至少一对元素,使用d
空间
确定(操作230)分段图像的第一结构元素是否包括缺陷。根据一些实施例,所述方法包括(操作230)至少使用d
空间
来确定提供第一结构元素的边缘粗糙度的信息的数据。以下将提供实施例。
69.现在将注意力转向图3。
70.假设获得给定元素对(包括第一结构元素和对应的第二结构元素)(参见操作300)。根据一些实施例,确定d
空间
(如参考操作220所解释)包括确定(操作310)要应用到所述对的元素的多个像素(特别地,要应用到存在于元素的轮廓上的像素)的相同空间变换。换句话说,被应用空间变换的元素的所有像素都经历了共同且唯一的空间变换(x轴与y轴之间的空间变换可不同)。
71.根据一些实施例,空间变换可包括平移和扩张(其中多边形可生长或收缩)中的至少一者,或者多个这些操作的组合。
72.根据一些实施例,确定要应用到第二结构元素的空间变换,以便使所述对的元素匹配。根据其他实施例,确定要应用到第一结构元素的空间变换,以便使所述对的元素匹配。
73.图3a中提供了非限制性示例,描绘了第一结构元素381和对应的第二结构元素386。可确定空间变换,并且将所述空间变换应用到例如第二结构元素386。此空间变换的输出是经校正的元素387。如在图3a中可见,将相同空间变换应用到第二结构元素386的轮廓的像素提供经校正的元素387。
74.经校正的元素387表示第二结构元素386的“理想”形状(特别是消除或至少减少存在于轮廓上的扰动,诸如工艺变化),并且可用于各种应用。例如,由于抵消或至少减少了存在于第一结构元素的轮廓中的噪声,经校正的元素可用于确定在经校正的元素与图像的其他元素之间的距离,或者更好地确定由第一结构元素覆盖的总面积。以下描述了其他可能的应用(特别是对缺陷的检测、对提供边缘粗糙度的信息的数据的确定)。
75.现在将注意力转向图3b。根据一些实施例,方法可进一步包括(除了以上已经描述的操作300和310之外)确定(操作320)表示空间变换的幅值的数据d
幅值
。例如,在图3a中,沿x轴的d
幅值
可由提供距离390和/或距离391的信息的数据表示(在一些实施例中,此距离可相
对于在空间变换之前的第二结构元素的大小归一化)。类似地,沿y轴的d
幅值
可由提供距离392和/或距离393的信息的数据表示(在一些实施例中,此距离可相对于在空间变换之前的第二结构元素的大小归一化)。根据一些实施例,可基于沿x轴的d
幅值
和沿y轴的d
幅值
来确定d
幅值
的聚合值。然而,这不是限制性的。
76.根据一些实施例,假设空间变换可通过仿射等式进行建模:
77.x
校正
=s
x
x
ref
+t
x
78.y
校正
=syx
ref
+ty79.在此等式中,x
ref
(相应地,y
ref
)是一对的第二结构元素的像素沿x轴(相应地,y轴)的位置,并且x
校正
(相应地,y
校正
)是经校正的元素的像素沿y轴的位置。s
x
(相应地,sy)是沿x轴(相应地,y轴)的空间变换的比例因子。t
x
(相应地,ty)是沿x轴(相应地,y轴)的空间变换的平移因子。
80.所述方法可进一步包括至少基于d
幅值
来确定(操作330)提供第一结构元素中的缺陷的信息的数据。特别地,如果d
幅值
不满足标准(例如,它高于阈值或低于阈值,这取决于d
幅值
的定义),则这可指示缺陷。在一些实施例中,如果沿x轴的d
幅值
和沿y轴的d
幅值
中的至少一者不满足标准,则这可指示缺陷。根据一些实施例,可将s
x
、sy、t
x
和ty中的至少一者与阈值进行比较,以便确定是否存在缺陷(特别地,高于s
x
和/或sy的阈值的值可指示存在缺陷)。根据一些实施例,操作330可包括提供存在缺陷的第一可能性(例如,概率p1)。可使用d
幅值
确定此第一可能性。根据一些实施例,可基于在d
幅值
与标准(诸如阈值)之间的比较的结果来生成第一可能性。
81.图3b的方法可迭代地应用于多个元素对(参见附图标记340),每个元素对包括分段图像的第一结构元素和参考图像的对应的第二结构元素。这对于每个元素对提供了第一结构元素中存在缺陷的第一可能性。
82.根据一些实施例,对于多个元素对中的每一者,确定使所述对的元素匹配所需的表示空间变换的幅值的数据d
幅值
。因此,获得d
幅值
的各种值的分布。一般来讲,获得的d
幅值
的值的大部分都位于同一区间内,只有几个值位于此区间外。对缺陷的识别可包括识别d
幅值
的位于群体的大多数的区间外的不规则值。图3c中示出了非限制性示例,其中d
幅值
的值的大多数位于同一区间360中。两个值340和350在区间360外,并且被识别为对应于缺陷。
83.现在将注意力转向图4,描绘了确定使一对的两个结构元素匹配所需的空间变换的方法。所述方法可包括获得(400)提供第一结构元素的第一多个像素的位置的信息的数据。特别地,这可对应于位于第一结构元素的轮廓上的像素。所述方法可包括获得(410)提供第二结构元素的第二多个像素的位置的信息的数据。特别地,这可对应于位于第二结构元素的轮廓上的像素。
84.所述方法可进一步包括确定(420)表示在第一多个像素与第二多个像素之间的对应关系的数据d
对应
。换句话说,对于第一结构元素(相应地,第二结构元素)的每个给定像素,尝试确定它对应于第二结构元素(相应地,第一结构元素)的哪个像素。
85.根据一些实施例,d
对应
是基于以下项中的至少一者:第一多个像素和第二多个像素中的至少一些像素的位置,和提供第一结构元素和第二结构元素中的至少一者的局部形状的信息的数据。如果第一结构元素的给定像素和第二结构元素的给定像素具有根据标准对应的位置,则存在这两个像素彼此对应的可能性。为了进一步改善这种对应关系,还可考虑
到局部形状。这可在图4a的非限制性示例中示出。
86.在图4a中,尝试确定第一结构元素481的对应于第二结构元素486的像素450的像素。如果仅考虑到像素的相对位置,则像素460是第一结构元素481的与像素450最佳地对应的像素。然而,如在图4a中可见,在这种特定情况下,像素455更好地对应于像素450。通过还考虑到第一结构元素和第二结构元素的形状的匹配,可确定像素455与像素450最佳地对应,尽管像素455比像素460距像素450更远。
87.根据一些实施例,局部形状可包括与第一结构元素和第二结构元素中的至少一者的轮廓正交的方向。此方向也称为轮廓的法线。例如,在图4a的图中,在像素450附近的第二结构元素486的轮廓的法线由箭头490表示,在像素455附近的第一结构元素481的轮廓的法线由箭头491表示,并且在像素460附近的第一结构元素481的轮廓的法线由箭头492表示。如在图4a中可见,法线490与法线491的匹配程度比法线492更高。
88.根据一些实施例,提供第一结构元素和第二结构元素中的至少一者的局部形状的信息的数据包括第一结构元素和第二结构元素中的至少一者的曲率。例如,可确定在被检查像素周围的元素的轮廓的局部曲率。这在图4a中示出,其中针对像素493确定局部曲率492,并且针对像素494确定局部曲率495。可根据需要来确定提供局部形状的信息的其他数据。
89.根据一些实施例,可确定成本函数,以便确定在第一多个像素与第二多个像素之间的对应关系。成本函数可例如基于在p1与p2之间的欧几里得距离和在提供像素p1的局部形状的信息的数据与提供像素p2的局部形状的信息的数据之间的差异来表达在像素p1(来自第一结构元素)与像素p2(来自第二结构元素)之间的对应关系的水平。
90.返回图4a的方法,一旦已经确定d
对应
,就可使用d
对应
确定d
空间
。实际上,由于d
对应
指示彼此对应的第一结构元素和第二结构元素的像素对,因此可通过确定确保这些像素对的空间匹配所需的空间变换来确定d
空间
。
91.根据一些实施例,并且如上所述,空间变换被表达为单个变换(例如,仿射函数),以将相似性应用于第二结构元素的像素,以便获得与第一结构元素匹配的经校正的元素。以下提供了这种空间变换的非限制性建模:
[0092][0093]
在此表达式中,x
seg
和y
seg
是第一结构元素的第一像素的空间坐标,x
ref
和y
ref
是第二结构元素的第二像素的空间坐标,其中第一像素和第二像素已经根据d
对应
被识别为彼此对应。s
x
、sy、t
x
和ty是要确定的仿射变换的参数。
[0094]
由于基于d
对应
可得到多个匹配像素对,因此可解决全局优化问题,这可如下表达(不限于此):
[0095][0096]
[0097]
在此表达式中,对于由d
对应
提供的像素的每个对“p”,和是第一结构元素的第一像素的空间坐标,并且和是第二结构元素的第二像素(对应于第一像素)的空间坐标。
[0098]
一旦已经确定空间变换的参数,所述方法就可包括输出经校正的元素。根据一些实施例,空间变换被应用于(参考图像的)第二结构元素,以便获得经校正的元素。例如,在图3a中,第二结构元素386(在空间变换之后)被变换成经校正的元素387。这不是限制性的,并且在其他实施例中,确定空间变换,并且将所述空间变换应用到第一结构元素,以便获得经校正的元素。
[0099]
对于包括分段图像的第一结构元素和参考图像的对应的第二结构元素的多个元素对中的每一者,可迭代地重复图4的方法。因此,可生成经校正的图像(包括所有的经校正的元素)。图4b中示出了非限制性示例,其中图像498被转换成经校正的图像499。
[0100]
现在将注意力转向图5。假设对于包括分段图像的第一结构元素和参考图像的对应的第二结构元素的对,已经将第二结构元素修改成经校正的元素(操作500),如在以上各种实施例中所解释。所述方法可包括对于所述对的第一结构元素的多个像素中的每个像素,确定在像素与所述对的经校正的元素的对应像素之间的距离(例如欧几里得距离)(操作510)。对应像素例如从提供在第一结构元素与对应的第二结构元素之间的对应像素的操作420(参见图4)的输出中已知。由于经校正的元素包括在几何变换(例如,平移/扩张)之后的第二结构元素的像素,因此第一结构元素和经校正的元素的对应像素是已知的。然而,这不是限制性的。
[0101]
根据一些实施例,对于第一结构元素的多个像素中的每个像素,确定在像素与经校正的元素的对应像素之间的距离。因此,获得距离的值的分布(以下称为“距离分布”,参见例如图5b中的非限制性示例)。
[0102]
此距离分布可用于各种应用。
[0103]
根据一些实施例,距离分布可用于确定提供第一结构元素的边缘粗糙度的信息的数据(参见操作514)。实际上,由于经校正的元素的轮廓一般没有工艺变化,因此可被用作确定提供第一结构元素的轮廓中的边缘粗糙度的信息的数据的参考。
[0104]
根据一些实施例,距离分布可用于确定提供第一结构元素中的缺陷的信息的数据(操作515)。在一些实施例中,此距离分布可用于检测此距离对应于异常(缺陷,参见例如图5a)的具体像素。
[0105]
根据一些实施例,距离分布可用于确定提供第一结构元素的边缘粗糙度的信息的数据和确定提供第一结构元素中的缺陷的信息的数据两者。
[0106]
图5a中示出了非限制性示例。假设第一结构元素表示为元素520,并且假设经校正的元素(与第一结构元素相关联)表示为元素530。计算在对应像素之间的多个距离540。如上所述,这可针对多个对执行,每个对包括第一结构元素和对应的经校正的元素。对于每个对,可获得距离的分布560,如图5b所示。
[0107]
由于像素的大多数使得在第一结构元素与经校正的元素之间的距离很小,因此分布一般以接近零的值(主峰)为中心。确定提供边缘粗糙度的信息的数据可包括例如确定与距离分布560的主峰561相关联的标准偏差(附图标记580,或者其他相关统计数据)。
[0108]
第二峰570在分布中可见,以距离的给定负值为中心。此第二峰与和像素的大多数相关联的距离分布不匹配,因此可识别出属于此第二峰的所有像素对应于缺陷。在图5a的特定示例中,峰570对应于像素535(对于像素535,相对于经校正的元素530在第一结构元素520中存在侵入)。
[0109]
属于缺陷的像素的识别可包括确定提供属于群体的“大部分”的像素的距离的信息的统计数据。例如,此统计数据可包括例如标准偏差(std)580,如图5b所示。可基于统计数据来设置阈值。例如,距离的绝对值高于n*std(n可例如由操作员选择,例如,n=3)的任何像素都被认为是属于缺陷。这在图5b示出,其中峰570对应于与高于阈值590的距离相关联的像素。
[0110]
已经参考图3b解释的是,可确定变换,以便使第一结构元素和第二结构元素匹配。提供变换的幅值的信息的数据(d
幅值
)可用于检测第一结构元素中缺陷的存在。当第一结构元素中存在缺陷(例如,所述缺陷是局部突起)时,d
幅值
不一定指示存在缺陷,并且因此,图5的方法可有助于检测这种局部缺陷。然而,这不是限制性的。
[0111]
图5的方法可提供各种信息,诸如,对于被识别为属于缺陷的每个像素,所述像素与经校正的元素的像素的距离、距离的符号(其指示是否存在侵入或挤出)等。在一些实施例中,此信息可输出到用户。
[0112]
现在将注意力转向图6。如参考上述各种实施例所解释,一旦针对每个第一结构元素(参见例如图3)获得经校正的元素(操作600),就可执行各种处理任务以检测缺陷。
[0113]
根据一些实施例,并且如参考图3b所描述,使经校正的元素与第一结构元素匹配所需的提供变换的信息的数据(并且特别是变换的幅值d
幅值
)可用于检测缺陷。如以上所解释,对于多个第一结构元素中的每个给定第一结构元素,可使用提供变换的信息的数据来确定给定第一结构元素中存在缺陷的可能性。
[0114]
根据一些实施例,并且如以上所解释,可使用图5的方法来检测缺陷的存在,其中确定在第一结构元素的和(例如,在第二结构元素的校正之后生成的)经校正的元素的对应像素之间的距离,由此产生距离分布(参见例如图5b)。
[0115]
因此,并且如图6所示(参见操作610),对于包括第一结构元素和第二结构元素的给定对,可基于使所述对的元素匹配所需的变换的幅值和/或基于在第一结构元素的和经校正的元素的对应像素之间的距离分布来计算第一结构元素中存在缺陷的可能性(例如,概率)。基于在可能性与标准之间的比较,可检测缺陷(例如,如果可能性高于阈值,则这可指示存在缺陷的高可能性)。
[0116]
根据一些实施例,假设已经在第一位置处识别了第一缺陷并且已经在不同于第一位置的第二位置处识别了第二缺陷。如果在第一位置与第二位置之间的距离低于阈值,则可将第一缺陷和第二缺陷视为单个缺陷(缺陷的“聚类”),其作为涵盖第一位置和第二位置两者的单个位置来输出给用户。
[0117]
要注意,可根据所有可能的技术组合来组合各种实施例中描述的各种特征。将理解,本发明的应用不限于本文中包含的描述中阐述的或附图中示出的细节。本发明能够具有其他实施例并且能够以各种方式实践或进行。因此,将理解,本文中采用的措辞和术语是出于描述的目的,并且不应当被视为限制性的。因此,本领域技术人员将了解,本公开内容所基于的概念可容易地用作设计用于进行当前公开的主题的若干目的的其他结构、方法和
系统的基础。本领域技术人员将容易地了解,在不脱离本发明的在所附权利要求中且由所附权利要求定义的范围的情况下,可对如上所述的本发明的实施例应用各种修改和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1