一种二维弹性绳的逆向设计方法
1.本发明涉及逆向设计领域,特别是涉及一种二维弹性绳的逆向设计方法。
技术背景
2.弹性绳结构在自然界以及工程上很常见,例如绳索,电话线,游戏、动画中的人物毛发,尾巴等,它们在现实世界中出现的形状通常是由外力或约束下的拉伸、弯曲和扭曲造成的变形形状,例如重力,这个变形过程可通过实验或者力学仿真实现。
3.然而,由于从弹性绳变形后结构到变形前结构的求解是一个强非线性的问题,传统力学方法很难直接求解。因此,如何求解未变形的弹性绳结构,使制作完成后,在重力或其它外力作用下,变形成用户需要的形状,仍然是一个棘手的问题。
4.目前,针对这一问题,主要有两类方法,一类试图通过求解微分方程组得出未变形结构,但该方法实现过程复杂,且对目标形状有严格的数学连续性要求;另一类方法是使用机器学习算法中的全局搜索算法,如模拟退火(sa)、遗传算法(ga)和粒子群优化(pso)等,但这些算法搜索时间长,且由于该逆向搜索过程中,误差并不会随着未知量的减少而单调降低,因此往往陷入局部极小值,而无法找出满足要求的逆向设计方案。
技术实现要素:
5.本发明的目的在于提供一种实现过程简单且对数学连续性要求低的弹性绳逆向设计方法。
6.本发明公开了一种二维弹性绳的逆向设计方法,包括如下步骤:
7.步骤一、设定弹性绳所受外力组合f以及目标形状,将弹性绳一端固定,作为固定端,另一端为自由端;设弹性绳总长l,将所述弹性绳等分为n段其中,最接近固定端的一段作为l1,顺次递增,直至最接近自由端的ln;
8.步骤二、选取邻近自由端的两段ln和l
n-1
,求解两段之间夹角θn;
9.步骤三、增加考虑靠近自由端的第l
n-2
段,求解l
n-1
、l
n-2
段之间夹角θ
n-1
;
10.步骤四、依次增加段数进行求解,直至所有段弹性绳,求解出所有的θ值,得到所有的夹角值结合每段长度,求解出未受力变形前的形状。
11.进一步的,在所述步骤二中,所述两段之间夹角θn求解使用遍历搜索算法,搜索范围、步长以及允许误差由由用户根据精度要求以及求解速度决定。
12.进一步的,所述遍历搜索算法具体包括:将l
n-1
段固定,选取一定角度的转角作为预设值,将两段ln和l
n-1
以及所述转角输入仿真环境中,得出其在相应受力下的形状,与目标形状对比并计算误差;改变角度,在一定范围内进行遍历,选取步进增量δ,分别计算每个角度的误差值,选取其中最小误差值对应的转角作为ln和l
n-1
之间的转角。
13.进一步的,所述计算误差计算方法为:
14.其中,弹性绳总长l,将所述弹性绳等分为n段,(xi,yi)为仿真环境下弹性绳节点的位置坐标,为目标曲线上对应节点的位置坐标。
15.进一步的,坐标由每段长度以及两端之间转角确定,
16.计算公式如下:
17.其中li为每段弹性绳长度,为i弹性绳与水平轴夹角,
18.进一步的,所述转角δθ取值范围可初步取为
19.进一步的,所述步进增量δ为0.001。
20.进一步的,所述弹性绳为平面结构,所述弹性绳所所有外力均与所述弹性绳在同一平面内。
21.本发明有益效果在于:
22.1、本发明所公开的方法为将目标设计形状离散化后,从自由端往固定端逐段求解,每次求解一个转角值,求解完成后的所有转角及边长可转换为未变形的弹性绳结构;本方法相较于有方法,无需复杂的材料模型,可适用于多种材料场景,通用性更高;此方法从末端自由端开始计算,可以一定程度上避免误差累积效应,即后续计算求解的转角不会影响之前的转角;
23.2、本发明使用搜索算法,可以有效避免误差不随着未知数的减少而单调减少的问题;此方法无需求解复杂的静力学方程,求解计算量大大减少。
附图说明
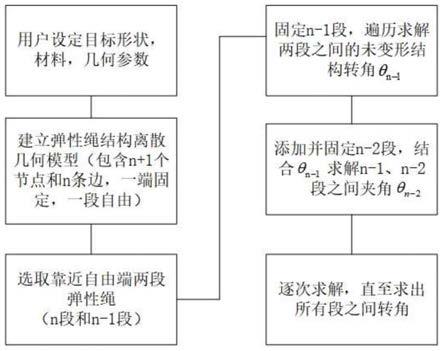
24.图1为本发明方法的流程图;
25.图2为本发明中转角的求解方法;
26.图3为本发明实例的求解方法。
具体实施方式
27.下面结合附图对本发明作进一步说明:
28.如图1-2所示,本发明公开了一种二维弹性绳的逆向设计方法,包括如下步骤:
29.s1:设定目标弹性绳一端为固定端a1,另一端为自由端a2。根据实际应用情况确定目标形状,弹性绳总长l,将弹性绳离散为等长的n段则每段长固定与固定端a1相接的一小段弹性绳l1。由此,只需求解出每段弹性绳与上段弹性绳之间夹角即可求解出目标弹性绳变形前形状。
30.s2:通过力与力矩逐步等效的方法,由自由端a2开始求解,先取出距离自由端最近的两段弹性绳ln、l
n-1
,并固定l
n-1
,求解ln、l
n-1
之间转角δθ
n-1
。
31.s3:根据实际情况确定转角δθ
n-1
取值范围[-θ
max
,θ
max
];根据实际需要精度确定步进增量δ。
[0032]
其中,该转角δθ取值范围可初步取为步进增量δ可初步取为0.001,而后根据计算结果进一步优化取值。其中,角度取值范围是由目标形状确定的,可以根据计算结果进行进一步优化。由于要保证弹性绳的连续性和柔顺性,转角一般不会太大。
[0033]
s4:在仿真环境中,以δ的增量在[-θ
max
,θ
max
]进行遍历,并计算每个数值对应的仿真形状与实际形状之间的误差e,搜索其中最小误差e
min
,与ea进行比较得到对应的转角即为待求解的转角θ
n-1
。
[0034]
具体地,e
min
与ea进行比较,若e
min
>ea,则进一步减小δ的值,重新进行遍历求解;若e
min
<ea,则对应的转角即为待求解的转角θ
n-1
。
[0035]
具体地,误差计算公式其中(xi,yi)为仿真环境下弹性绳节点的位置坐标,为目标曲线上对应节点的位置坐标。xy坐标由每段长度以及两端之间转角确定,计算公式如下:其中li为每段刚体长度,为刚体与水平轴夹角,
[0036]
s5:增加并固定弹性绳l
n-2
,重复s3-s4,求解出
[0037]
s6:每次增加一段并固定,重复s3-s5,求解出所有段之间转角则可以由和共同确定为弹性绳未变形前形状。
[0038]
具体实例1
[0039]
如图3所示,将弹性绳等分为31段,则有32个节点,30个转角,以固定端开始计数,为第1段,自由端为第31段,第1、2段间转角为θ1,依次类推,第30、31段间转角为θ
30
。
[0040]
第1步,首先由自由端开始求解,选取第30、31段并固定第30段,θ
30
在范围内按0.001的间隔进行遍历,将每个值作为条件输入仿真环境中,将受力后形状与目标形状进行对比,并根据误差计算公式计算误差,选取误差e最小的值作为θ
30
的值;
[0041]
第2步,而后增加并固定第29段,第30、31段以θ
30
的转角进行连接,θ
29
在范围内按0.001的间隔进行遍历,将每个值作为条件输入仿真环境中,将受力后形状与目标形状进行对比,并根据误差计算公式计算误差,根据误差计算公式,选取误差e最小的值作为θ
29
的值;
[0042]
步骤3-30,依此类推,每次增加一段,直至增加到第1段,此时便可求解出所有的θ值所有的值;
[0043]
以原点出发,以l1为长度,转动θ1;然后在l1末端,以l1为长度,转动θ2,以次类推,直至结合每段长度,画出未受力变形前的形状。
[0044]
本发明公开了一种二维弹性绳的逆向设计方法,可根据所给定的变形后弹性绳目标形状、外力条件及材料、几何参数,逆向计算出变形前的弹性绳结构。包括以下步骤:由用户指定材料类型,目标形状以及一组外力集合;基于目标形状,将整段弹性绳离散为等长的若干段,每段弹性绳按照刚体处理,相邻两段间以节点连接;以每段绳长度以及该段与上一段之间转角表征该段绳的位置;该弹性绳结构一端固定,一端自由,从自由端开始,一段接一段地计算未变形结构对应的转角值,直到完成固定端的转角计算为止;计算该转角值时,通过在设定范围内均匀搜索的方式,将每一个假定待求的转角与已知转角转换为未变形的弹性绳结构,输入力学仿真模型,再将模型输出的变形后形状与当前部分的目标设计形状相比较,形状误差最小的转角值即为所求值。该方法可以解决传统力学方法无法直接求解的弹性绳逆向设计问题,帮助用户设计出多种不同形状、材料、几何参数的弹性绳结构产品,可以应用于4d打印,软体机器人制造等领域。
[0045]
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发眀范围内。本发明要求保护范围由所附的权利要求书及其效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1