一种无人机与无人船联合平台的水上溢油监测系统及方法与流程
1.本技术涉及水上溢油监测技术领域,具体而言,涉及一种无人机与无人船联合平台的水上溢油监测系统及方法。
背景技术:
2.人类每年消耗巨量石油,其中约2/3的石油贸易通过水上运输,而在运输石油过程中,水上溢油事故多发。据统计,1973~2008年,中国沿海共发生大小溢油事故2800多例,其中50t以上的重大船舶溢油事故74例。这些溢油事故给海洋或河流生态环境造成了巨大危害,严重影响了人与自然的和谐共生。此外,当溢油事故发生时,若不能迅速发现溢油,任凭溢油扩散,就会使得危害成倍放大。因此,迅速而准确地监测水上溢油是一项意义重大的课题。
3.在实现本发明过程中,申请人发现现有技术中至少存在以下不足:
4.1)针对目前已有的无人机监测水上溢油技术:专利名称为“基于无人机的近海溢油检测方法及系统”,公开号为cn104618689a。这些技术实施过程中,无人机返航需要消耗大量能量,如此使得无人机续航能力降低,工作效率低下。
5.2)针对目前已有的无人船监测水上溢油技术:专利名称为“水面溢油跟踪方法、水面溢油跟踪装置及电子设备”,公开号为cn109960283a。这些技术需要无人船行驶到溢油区域或区域附近才能进行溢油监测,如此使得溢油监测反应不够迅速,不利于后续的应急处理。
技术实现要素:
6.本技术实施例的目的在于提供一种无人机与无人船联合平台的水上溢油监测系统及方法,以快速准确且高效地实现水上溢油监测。
7.为了实现上述目的,本技术的实施例通过如下方式实现:
8.第一方面,本技术实施例提供一种无人机与无人船联合平台的水上溢油监测系统,包括:无人机溢油检测部,用于获取监测区域的紫外光谱数据和可见光高清影像数据;多源数据处理部,用于基于所述紫外光谱数据和所述可见光高清影像数据,从所述监测区域中确定出可疑溢油区域;联合指挥控制部,用于基于所述可疑溢油区域,生成溢油查证信息,其中,溢油查证信息包含所述可疑溢油区域的位置信息;无人船溢油检测部,用于基于所述溢油查证信息,对所述位置信息对应的可疑溢油区域进行紫外荧光识别,获取紫外荧光数据;所述多源数据处理部,还用于基于所述紫外荧光数据,判断所述可疑溢油区域是否发生溢油,并在所述可疑溢油区域发生溢油时,生成溢油信息,其中,所述溢油信息包含溢油区域的位置信息;预警模块,用于接收所述溢油信息并进行预警。
9.在本技术实施例中,首先利用无人机的大范围监测优势,进行紫外光谱数据和可见光高清影像数据的可疑溢油区域监测(可以理解为初步监测),能够尽可能发现可能发生溢油的可疑溢油区域,避免漏检风险。在确定出可疑溢油区域后,联合指挥控制部生成溢油
查证信息,控制无人船前往可疑溢油区域进行二次检测——对可疑溢油区域进行紫外荧光识别,获取紫外荧光数据,并通过多源数据处理部判断可疑溢油区域是否发生溢油,从而在可疑溢油区域发生溢油时,生成溢油信息并利用预警模块进行预警。因此,本方案结合无人机和无人船的水上溢油监测技术,采用多种技术手段判定,减少了采用单一手段引起的误判率(太阳耀光或者黑潮等会引起溢油的误判),显著提高了无人船监测溢油的效率和性价比。并且,结合无人机和无人船的水上溢油监测技术,可以实现较大范围和长时间的连续监测。以及,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此,采用紫外被动遥感溢油技术(紫外光谱数据)和紫外荧光主动探测技术(紫外荧光数据),可以实现对水上溢油的高效准确的监测,由此实现对水上溢油大范围和精细化的监测。
10.结合第一方面,在第一方面的第一种可能的实现方式中,所述无人机溢油检测部包括无人机、第一云台、机载紫外高光谱成像仪、机载高清摄像仪和无人机通信模块,所述第一云台安装于所述无人机的底端;所述机载紫外高光谱成像仪和所述机载高清摄像仪安装于所述第一云台上,分别用于获取监测区域反射的紫外光谱数据和可见光高清影像数据;所述无人机通信模块,安装在所述无人机的顶端,用于将所述紫外光谱数据和所述可见光高清影像数据发送给所述多源数据处理部。
11.结合第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,所述无人船溢油检测部包括无人船、无人机起落平台、挂载装置、紫外荧光溢油监测装置和无人船通信模块,所述无人机起落平台安装在所述无人船的船体上,用于所述无人机的起降;所述挂载装置安装于所述无人船的船舷一侧;所述紫外荧光溢油监测装置包括紫外激发光源和可见光高光谱仪,所述紫外激发光源和所述可见光高光谱仪安装于所述挂载装置上的第二云台上,用于通过所述紫外激发光源照射所述可疑溢油区域,并通过所述可见光高光谱仪获取紫外荧光数据;而无人船通信模块安装在无人船的顶端,用于将紫外荧光数据发送给多源数据处理部。
12.结合第一方面的第二种可能的实现方式,在第一方面的第三种可能的实现方式中,所述紫外激发光源为高强度紫外线射灯,所述可见光高光谱仪为紫外-可见光高光谱仪,所述高强度紫外线射灯,垂直于水面安装,用于向水面发射脉冲式紫外线;所述紫外-可见光高光谱仪,与所述高强度紫外线射灯水平平行安装,其镜头指向与水面垂直,用于接收和测量受紫外线激发而产生的荧光信号,得到所述紫外荧光数据。
13.结合第一方面的第二种或第三种可能的实现方式,在第一方面的第四种可能的实现方式中,所述多源数据处理部,具体用于:对所述紫外光谱数据进行中值滤波处理,再利用kittle二值化算法对处理后的所述紫外光谱数据进行阈值分割以获得对应的二值图像,其中,将亮度值达到分割阈值的像元赋值为像素值255,将亮度值未达到分割阈值的像元赋值为像素值0;确定出此二值图像中像素值255的像元所占的比例,并在此比例达到设定比例时,确定满足第一条件,从而基于所述二值图像中像素值255的像元确定出对应的可疑溢油区域;对所述可见光高清影像数据进行图像识别,确定所述可见光高清影像数据中是否存在可能发生溢油的图像区域,并在存在可能发生溢油的图像区域时,确定满足第二条件,并基于此图像区域确定出对应的可疑溢油区域;若满足所述第一条件和/或所述第二条件,确定所述监测区域中可能存在溢油,而可能发生溢油的区域则为其各自对应的可疑溢油区
域。
14.在该实现方式中,对紫外光谱数据进行中值滤波处理,再利用kittle二值化算法对处理后的紫外光谱数据进行阈值分割以获得对应的二值图像,确定出此二值图像中像素值255的像元所占的比例,并在此比例达到设定比例时,确定满足第一条件,从而基于二值图像中像素值255的像元确定出对应的可疑溢油区域。对可见光高清影像数据进行图像识别,确定可见光高清影像数据中是否存在可能发生溢油的图像区域,并在存在可能发生溢油的图像区域时,确定满足第二条件,并基于此图像区域确定出对应的可疑溢油区域。这样可以分别利用紫外光谱数据和可见光高清影像数据实现对监测区域的初步监测(确定出可疑溢油区域),且能够尽可能提升每种监测手段的准确性,减少干扰因素导致的误检漏检。
15.结合第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,所述多源数据处理部,具体用于:从所述紫外荧光数据中确定出所述可疑溢油区域的荧光强度,并在所述可疑溢油区域的荧光强度大于设定荧光强度时,确定所述可疑溢油区域发生溢油。
16.在该实现方式中,利用紫外荧光数据中确定出的可疑溢油区域的荧光强度,作为二次检测的依据,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此不会受到水面反射太阳耀光或黑潮的干扰,从而在二次检测中实现对是否溢油的准确判断,大大提升溢油监测的准确性。
17.结合第一方面的第五种可能的实现方式,在第一方面的第六种可能的实现方式中,所述多源数据处理部,还用于:通过模式识别,对所述无人船获取的多组紫外荧光数据进行聚合分类,得到最具典型的一类荧光光谱;将该类荧光光谱与光谱数据库进行比对,从光谱数据库中确定出与之最相似的目标光谱,所述目标光谱对应的油品即为溢油区域发生溢油的目标油品种类,进一步确定出此目标油品种类所对应的目标油膜厚度;对应的,所述溢油信息还包含溢油区域的目标油品种类和目标油膜厚度。
18.在该实现方式中,通过模式识别,对无人船获取的多组紫外荧光数据进行聚合分类,得到最具典型的一类荧光光谱;将该类荧光光谱与光谱数据库进行比对,从光谱数据库中确定出与之最相似的目标光谱,目标光谱对应的油品即为溢油区域发生溢油的目标油品种类,进一步确定出此目标油品种类所对应的目标油膜厚度。通过此种方式可以高效可靠地确定出目标油品种类和目标油膜厚度,从而得到更完善的溢油信息,有利于后续溢油处理工作的开展。
19.结合第一方面的第五种可能的实现方式,在第一方面的第七种可能的实现方式中,所述多源数据处理部,还用于:利用紫外光谱数据,计算溢油面积:a
oil
=δ
×
n,其中,a
oil
表示溢油面积,δ为地面分辨率,n为处理后的所述紫外光谱数据经过kittler二值化后得到的二值图像中像素值255的像元个数;对应的,所述溢油信息还包含溢油区域的溢油面积。
20.在该实现方式中,利用紫外光谱数据,可以进一步计算溢油面积:a
oil
=δ
×
n,从而得到更完善的溢油信息,有利于后续溢油处理工作的开展。
21.第二方面,本技术实施例提供一种基于第一方面的第二种至第七种可能的实现方式中任一项所述的无人机与无人船联合平台的水上溢油监测系统的水上溢油监测方法,包
括:s1:控制所述无人机以飞行模式飞往监测区域,到达所述监测区域后控制所述无人机打开巡航模式,以最低耗能的方式实现对所述监测区域的大范围溢油监测覆盖;s2:通过所述机载紫外高光谱成像仪,获取所述监测区域的紫外光谱数据;s3:通过所述机载可见光高清摄像仪,获取所述监测区域的可见光高清影像数据;s4:利用所述多源数据处理部,基于所述紫外光谱数据和所述可见光高清影像数据,对所述监测区域进行溢油检测;s5:若基于所述紫外光谱数据和所述可见光高清影像数据均未检测出溢油,则判定此监测区域未发生溢油,跳转到s1并执行,进入下一监测区域;s6:若基于所述紫外光谱数据和所述可见光高清影像数据的任一溢油监测结果确定为可能发生溢油,则基于此监测区域确定出可疑溢油区域;s7:通过联合指挥控制部生成包含所述可疑溢油区域的位置信息的溢油查证信息,并指挥所述无人船按照该可疑溢油区域的位置信息驶往此可疑溢油区域;s8:通过所述紫外激发光源照射所述可疑溢油区域,并通过所述可见光高光谱仪获取紫外荧光数据;s9:再利用所述多源数据处理部,基于所述紫外荧光数据,判断所述可疑溢油区域是否发生溢油,并在所述可疑溢油区域发生溢油时,基于所述紫外荧光数据确定出溢油区域的目标油品种类和目标油膜厚度,基于所述紫外光谱数据计算溢油面积,并生成包含溢油区域的位置信息、溢油面积、目标油品种类和目标油膜厚度的溢油信息;s10:溢油信息被发送给所述预警模块,所述预警模块启动声光报警器开始预警。
22.在本技术实施例中,利用无人机的大范围监测优势,进行紫外光谱数据和可见光高清影像数据的可疑溢油区域监测(可以理解为初步监测),能够尽可能发现可能发生溢油的可疑溢油区域,避免漏检风险。在确定出可疑溢油区域后,联合指挥控制部生成溢油查证信息,控制无人船前往可疑溢油区域进行二次检测——对可疑溢油区域进行紫外荧光识别,获取紫外荧光数据,并通过多源数据处理部判断可疑溢油区域是否发生溢油,从而在可疑溢油区域发生溢油时,生成溢油信息并利用预警模块进行预警。因此,本方案结合无人机和无人船的水上溢油监测技术,采用多种技术手段判定,减少了采用单一手段引起的误判率(太阳耀光或者黑潮等会引起溢油的误判),显著提高了无人船监测溢油的效率和性价比。并且,结合无人机和无人船的水上溢油监测技术,可以实现较大范围和长时间的连续监测。以及,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此,采用紫外被动遥感溢油技术(紫外光谱数据)和紫外荧光主动探测技术(紫外荧光数据),可以实现对水上溢油的高效准确的监测,由此实现对水上溢油大范围和精细化的监测。并且,此种方式可以进一步确定出溢油面积、目标油品种类和目标油膜厚度,从而生成包含溢油区域的位置信息、溢油面积、目标油品种类和目标油膜厚度的溢油信息,以便对溢油事件进行及时预警,且有利于后续对溢油区域的控制措施的开展,减少溢油导致的危害。
23.为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
24.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其他相关的附图。
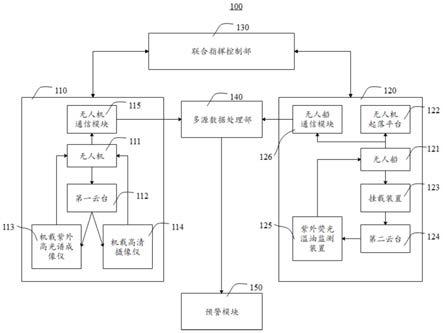
25.图1为本技术实施例提供的无人机与无人船联合平台的水上溢油监测系统的示意图。
26.图2为本技术实施例提供的应用于无人机与无人船联合平台的水上溢油监测系统的水上溢油监测方法的流程图。
27.图3为本技术实施例提供的一种示例性的水上溢油监测方法的执行流程。
28.图标:100-无人机与无人船联合平台的水上溢油监测系统;110-无人机溢油检测部;111-无人机;112-第一云台;113-机载紫外高光谱成像仪;114-机载高清摄像仪;115-无人机通信模块;120-无人船溢油检测部;121-无人船;122-无人机起落平台;123-挂载装置;124-第二云台;125-紫外荧光溢油监测装置;126-无人船通信模块;130-联合指挥控制部;140-多源数据处理部;150-预警模块。
具体实施方式
29.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
30.请参阅图1,图1为本技术实施例提供的无人机与无人船联合平台的水上溢油监测系统100的示意图。
31.在本实施例中,无人机与无人船联合平台的水上溢油监测系统100可以包括无人机溢油检测部110、无人船溢油检测部120、联合指挥控制部130、多源数据处理部140和预警模块150。
32.示例性的,无人机溢油检测部110,主要用于获取监测区域的紫外光谱数据和可见光高清影像数据。无人机溢油检测部110可以包括无人机111、第一云台112、机载紫外高光谱成像仪113、机载高清摄像仪114和无人机通信模块115。第一云台112安装于无人机111的底端;机载紫外高光谱成像仪113和机载高清摄像仪114安装于第一云台112上,分别用于获取监测区域反射的紫外光谱数据和可见光高清影像数据;而无人机通信模块115安装在无人机111的顶端,用于将紫外光谱数据和可见光高清影像数据发送给多源数据处理部140。
33.示例性的,无人船溢油检测部120,主要用于基于溢油查证信息,对位置信息对应的可疑溢油区域进行紫外荧光识别,获取紫外荧光数据。无人船溢油检测部120可以包括无人船121、无人机起落平台122、挂载装置123、紫外荧光溢油监测装置125和无人船通信模块126。无人机起落平台122安装在无人船121的船体上,可用于无人机111的起降;挂载装置123安装于无人船121的船舷一侧;紫外荧光溢油监测装置125包括紫外激发光源和可见光高光谱仪,紫外激发光源和可见光高光谱仪安装于挂载装置123上的第二云台124上,用于通过紫外激发光源照射可疑溢油区域,并通过可见光高光谱仪获取紫外荧光数据。而无人船通信模块126安装在无人船121的顶端,用于将紫外荧光数据发送给多源数据处理部140。
34.其中,紫外激发光源为高强度紫外线射灯,可见光高光谱仪为紫外-可见光高光谱仪。高强度紫外线射灯垂直于水面安装,用于向水面发射脉冲式紫外线;紫外-可见光高光谱仪与高强度紫外线射灯水平平行安装,其镜头指向与水面垂直,用于接收和测量受紫外线激发而产生的荧光信号,得到紫外荧光数据。
35.示例性的,多源数据处理部140,可以用于基于紫外光谱数据和可见光高清影像数据,从监测区域中确定出可疑溢油区域。
36.针对紫外光谱数据,由于机载紫外高光谱成像仪113获取的图像(即紫外光谱数据)常常受到“椒盐”噪声影响,图像噪声会对后续的溢油判别和溢油面积计算造成影响,因此,多源数据处理部140可以先对紫外光谱数据进行中值滤波处理。
37.在本实施例中,利用以下公式:
[0038][0039]
其中,(x,y)是当前像元坐标,是对当前像元复原后的数据值,s
xy
是整幅图像坐标空间,g(s,t)是包含噪声的当前像元邻域数据值。
[0040]
具体的,可以以当前像元为窗口中心,选定窗口大小(窗口大小一般为3
×
3、5
×
5、7
×7…
,本实施例中以7
×
7的窗口为例进行说明);然后统计窗口内的图像数据值,按照大小排序,找到中位数再将找到的中位数赋值给当前像元,并对逐个像元重复上述步骤,直至完成整幅图像处理。
[0041]
经过中值滤波去噪后,多源数据处理部140可以利用kittle二值化算法对处理后的所述紫外光谱数据进行阈值分割以获得对应的二值图像,其中,将亮度值达到分割阈值的像元赋值为像素值255,将亮度值未达到分割阈值的像元赋值为像素值0。由于可疑溢油区域的亮度值相对较高,而背景水体区域的亮度值相对较低,因此,可以将亮度值较高的像元的像素值设为255,将亮度值相对较低的像元的像素值设为0,通过分割阈值判定像元的亮度值是较高还是较低。那么,对于分割阈值的确定,可以采用以下公式实现:
[0042][0043]
其中,t为要计算的分割阈值,m
×
n是整幅图像(即处理后的紫外光谱数据)的像元个数,f(x,y)是对当前像元的数据值。
[0044]
具体的,可以计算每个像元对应的x方向的灰度梯度:
[0045][0046]
计算每个像元对应的y方向的灰度梯度:
[0047][0048]
令则图像平均灰度梯:
[0049][0050]
分割阈值t=m,即计算得到所需的分割阈值。
[0051]
确定出二值图像后,多源数据处理部140可以确定出此二值图像中像素值255的像元所占的比例,并在此比例达到设定比例时,确定满足第一条件,从而基于二值图像中像素
值255的像元确定出对应的可疑溢油区域。
[0052]
针对可见光高清影像数据,多源数据处理部140可以对可见光高清影像数据进行图像识别,确定可见光高清影像数据中是否存在可能发生溢油的图像区域。若存在可能发生溢油的图像区域,则确定满足第二条件,并基于此图像区域确定出对应的可疑溢油区域。
[0053]
而若满足第一条件和/或第二条件,多源数据处理部140可以确定监测区域中可能存在溢油,而可能发生溢油的区域则为其各自对应的可疑溢油区域。
[0054]
这样可以分别利用紫外光谱数据和可见光高清影像数据实现对监测区域的初步监测(确定出可疑溢油区域),且能够尽可能提升每种监测手段的准确性,减少干扰因素导致的误检漏检。
[0055]
针对二次检测,多源数据处理部140可以从紫外荧光数据中确定出可疑溢油区域的荧光强度,并在可疑溢油区域的荧光强度大于设定荧光强度时,确定可疑溢油区域发生溢油。
[0056]
利用紫外荧光数据中确定出的可疑溢油区域的荧光强度,作为二次检测的依据,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此不会受到水面反射太阳耀光或黑潮的干扰,从而在二次检测中实现对是否溢油的准确判断,大大提升溢油监测的准确性。
[0057]
在二次检测确定可疑溢油区域发生溢油时(该可疑溢油区域即转变为溢油区域),多源数据处理部140可以进一步计算关于溢油区域的详细信息,例如发生溢油的油品种类、油膜厚度、溢油面积等。
[0058]
针对油品种类和油膜厚度的确定,多源数据处理部140可以通过模式识别,对无人船获取的多组紫外荧光数据进行聚合分类,得到最具典型的一类荧光光谱,然后将该类荧光光谱与光谱数据库进行比对,从光谱数据库中确定出与之最相似的目标光谱,那么,目标光谱对应的油品即为溢油区域发生溢油的目标油品种类,而通过目标油品种类可以进一步确定出此目标油品种类所对应的目标油膜厚度(通过查询油品种类与油膜厚度的对应关系即可确定)。
[0059]
针对溢油面积的确定,多源数据处理部140可以利用紫外光谱数据,计算溢油面积:
[0060]aoil
=δ
×
n,
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0061]
其中,a
oil
表示溢油面积,δ为地面分辨率,n为处理后的所述紫外光谱数据经过kittler二值化后得到的二值图像中像素值255的像元个数。
[0062]
基于此,多源数据处理部140可以基于确定出的油品种类、油膜厚度、溢油面积,结合溢油区域的位置信息,生成包含溢油区域的位置信息、溢油面积、目标油品种类和目标油膜厚度的溢油信息。
[0063]
通过此种方式可以高效可靠地确定出目标油品种类和目标油膜厚度,利用紫外光谱数据,可以进一步计算溢油面积:a
oil
=δ
×
n,从而得到更完善的溢油信息,有利于后续溢油处理工作的开展。
[0064]
在确定出溢油信息后,多源数据处理部140可以将溢油信息发送给预警模块150。基于此,预警模块150可以用于接收溢油信息并进行预警。例如,预警模块150可以启动声光
报警器开始预警。
[0065]
以上即为对本实施例提供的无人机与无人船联合平台的水上溢油监测系统100的介绍,以下,将对应用于此无人机与无人船联合平台的水上溢油监测系统100的水上溢油监测方法进行介绍。
[0066]
请参阅图2,图2为本技术实施例提供的应用于无人机与无人船联合平台的水上溢油监测系统100的水上溢油监测方法的流程图。
[0067]
在本实施例中,水上溢油监测方法可以包括以下步骤:
[0068]
s1:控制所述无人机以飞行模式飞往监测区域,到达所述监测区域后控制所述无人机打开巡航模式,以最低耗能的方式实现对所述监测区域的大范围溢油监测覆盖。
[0069]
s2:通过所述机载紫外高光谱成像仪,获取所述监测区域的紫外光谱数据。
[0070]
s3:通过所述机载可见光高清摄像仪,获取所述监测区域的可见光高清影像数据。
[0071]
s4:利用所述多源数据处理部,基于所述紫外光谱数据和所述可见光高清影像数据,对所述监测区域进行溢油检测。
[0072]
s5:若基于所述紫外光谱数据和所述可见光高清影像数据均未检测出溢油,则判定此监测区域未发生溢油,跳转到s1并执行,进入下一监测区域。
[0073]
s6:若基于所述紫外光谱数据和所述可见光高清影像数据的任一溢油监测结果确定为可能发生溢油,则基于此监测区域确定出可疑溢油区域。
[0074]
s7:通过联合指挥控制部生成包含所述可疑溢油区域的位置信息的溢油查证信息,并指挥所述无人船按照该可疑溢油区域的位置信息驶往此可疑溢油区域。
[0075]
s8:通过所述紫外激发光源照射所述可疑溢油区域,并通过所述可见光高光谱仪获取紫外荧光数据。
[0076]
s9:再利用所述多源数据处理部,基于所述紫外荧光数据,判断所述可疑溢油区域是否发生溢油,并在所述可疑溢油区域发生溢油时,基于所述紫外荧光数据确定出溢油区域的目标油品种类和目标油膜厚度,基于所述紫外光谱数据计算溢油面积,并生成包含溢油区域的位置信息、溢油面积、目标油品种类和目标油膜厚度的溢油信息。
[0077]
s10:溢油信息被发送给所述预警模块,所述预警模块启动声光报警器开始预警。
[0078]
本实施例还给出一种示例性的水上溢油监测方法的执行流程,如图3所示。在本实施例中,无人机巡航到下一识别区(即监测区域),通过机载紫外光谱仪(即机载紫外高光谱成像仪113)获取此识别区的紫外光谱数据,利用记载高清摄像仪(即机载可见光高清摄像仪)获取识别区的高清影像(即可见光高清影像数据)。然后通过溢油被动紫外遥感识别技术对紫外光谱数据进行识别,判断是否存在溢油(即溢油的初步监测中的一个方式),还可以通过溢油影像(可见光高清影像数据)判定是否存在溢油(即溢油的初步监测中的另一个方式),从而确定初步监测过程中是否发现溢油。若初步监测过程中(通过无人机实现)并未发现溢油,则可以控制无人机前往需要巡航的下一识别区;若初步监测过程中发现溢油,可以控制无人船到此识别区进行二次检测——通过紫外激发荧光获取光谱(即利用可见光高光谱仪获取紫外荧光数据),利用溢油主动紫外荧光识别技术(即通过紫外荧光数据进行溢油判断),确定此识别区是否确实存在溢油。若二次检测(通过无人船实现)并不存在溢油,说明初步监测过程中的可疑溢油为误识别,可疑控制无人机前往下一识别区进行初步监测;若二次检测表明此识别区存在溢油,那可以进一步基于紫外光谱数据和可见光影数据
(基于可见光高清影像数据确定),计算识别区的溢油面积;利用紫外荧光数据鉴定溢油种类和计算油膜厚度,从而发送溢油实况和进行预警。
[0079]
通过对以上方法的执行,利用无人机的大范围监测优势,进行紫外光谱数据和可见光高清影像数据的可疑溢油区域监测(可以理解为初步监测),能够尽可能发现可能发生溢油的可疑溢油区域,避免漏检风险。在确定出可疑溢油区域后,联合指挥控制部130生成溢油查证信息,控制无人船前往可疑溢油区域进行二次检测——对可疑溢油区域进行紫外荧光识别,获取紫外荧光数据,并通过多源数据处理部140判断可疑溢油区域是否发生溢油,从而在可疑溢油区域发生溢油时,生成溢油信息并利用预警模块150进行预警。因此,结合无人机和无人船的水上溢油监测技术,采用多种技术手段判定,减少了采用单一手段引起的误判率(太阳耀光或者黑潮等会引起溢油的误判),显著提高了无人船监测溢油的效率和性价比。并且,结合无人机和无人船的水上溢油监测技术,可以实现较大范围和长时间的连续监测。以及,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此,采用紫外被动遥感溢油技术(紫外光谱数据)和紫外荧光主动探测技术(紫外荧光数据),可以实现对水上溢油的高效准确的监测,由此实现对水上溢油大范围和精细化的监测。并且,此种方式可以进一步确定出溢油面积、目标油品种类和目标油膜厚度,从而生成包含溢油区域的位置信息、溢油面积、目标油品种类和目标油膜厚度的溢油信息,以便对溢油事件进行及时预警,且有利于后续对溢油区域的控制措施的开展,减少溢油导致的危害。
[0080]
综上所述,本技术实施例提供一种无人机与无人船联合平台的水上溢油监测系统及方法,利用无人机的大范围监测优势,进行紫外光谱数据和可见光高清影像数据的可疑溢油区域监测(可以理解为初步监测),能够尽可能发现可能发生溢油的可疑溢油区域,避免漏检风险。在确定出可疑溢油区域后,联合指挥控制部130生成溢油查证信息,控制无人船前往可疑溢油区域进行二次检测——对可疑溢油区域进行紫外荧光识别,获取紫外荧光数据,并通过多源数据处理部140判断可疑溢油区域是否发生溢油,从而在可疑溢油区域发生溢油时,生成溢油信息并利用预警模块150进行预警。因此,本方案结合无人机和无人船的水上溢油监测技术,采用多种技术手段判定,减少了采用单一手段引起的误判率(太阳耀光或者黑潮等会引起溢油的误判),显著提高了无人船监测溢油的效率和性价比。并且,结合无人机和无人船的水上溢油监测技术,可以实现较大范围和长时间的连续监测。以及,由于油膜在紫外波段的反射率比水体高,紫外光会激发水面油膜产生可见光荧光,而一般水体或者水面浮游生物在紫外光照射下不会产生可见光荧光,因此,采用紫外被动遥感溢油技术(紫外光谱数据)和紫外荧光主动探测技术(紫外荧光数据),可以实现对水上溢油的高效准确的监测,由此实现对水上溢油大范围和精细化的监测。
[0081]
在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
[0082]
以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1