图像处理方法、介质及电子设备与流程
1.本发明涉及图像处理领域,特别是涉及一种图像处理方法、介质及电子设备。
背景技术:
2.实际应用中经常需要获取目标对象对目标区域的关注程度,其中,准确地判断目标对象与目标区域的相对位置关系是实现该目标的前提。然而,受到复杂的应用场景以及多变的用户需求等因素的影响,现有技术很难准确地判断目标对象与目标区域的相对位置关系。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种图像处理方法、介质及电子设备,用于解决现有技术中存在的上述问题。
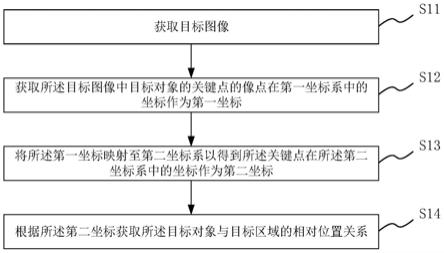
4.为实现上述目的及其他相关目的,本发明的第一方面提供一种图像处理方法,所述图像处理方法包括:获取目标图像,所述目标图像中包含目标对象的关键点的像点;获取所述关键点的像点在第一坐标系中的坐标作为第一坐标,所述第一坐标系是基于所述目标图像建立的坐标系;将所述第一坐标映射至第二坐标系以得到所述关键点在所述第二坐标系中的坐标作为第二坐标,所述第二坐标系是基于目标场景建立的坐标系;根据所述第二坐标获取所述目标对象与所述目标场景中的目标区域的相对位置关系。
5.于所述第一方面的一实施例中,将所述第一坐标映射至第二坐标系的实现方法包括:利用第一映射参数将所述第一坐标映射至所述第二坐标系,其中,所述第一映射参数包括用于采集所述目标图像的图像采集设备的高度、所述图像采集设备的水平方向视场角、所述图像采集设备的倾斜角度以及所述目标图像的分辨率。
6.于所述第一方面的一实施例中,将所述第一坐标映射至第二坐标系以得到所述关键点在所述第二坐标系中的坐标作为第二坐标的实现方法包括:根据所述第一坐标和所述目标图像的中心点坐标获取第一距离和第二距离,所述第一距离是指所述关键点的像点与所述目标图像的中心点之间的横向距离,所述第二距离是指所述关键点的像点与所述中心点之间的纵向距离;根据所述第一距离、所述第二距离、所述目标图像的分辨率以及所述图像采集设备的水平方向视场角获取第一偏移角;根据所述第一偏移角、所述第一距离和所述第二距离获取第二偏移角;根据所述图像采集设备的高度、所述第一偏移角、所述第二偏移角和所述图像采集设备的水平方向视场角获取第三距离和第四距离,所述第三距离是指所述关键点与所述第二坐标系的原点之间的横向距离,所述第四距离是指所述关键点与所述第二坐标系的原点之间的纵向距离;根据所述第三距离和所述第四距离获取所述第二坐标。
7.于所述第一方面的一实施例中,根据所述第二坐标获取所述目标对象与所述目标场景中的目标区域的相对位置关系的实现方法包括:将所述第二坐标映射至第三坐标系以得到所述关键点对应的映射点坐标作为第三坐标;根据所述第三坐标系中所述目标区域的
特征点对应的映射点坐标以及所述第三坐标获取所述目标对象与所述目标区域的相对位置关系。
8.于所述第一方面的一实施例中,所述第三坐标系是基于所述目标场景的图纸建立的坐标系。
9.于所述第一方面的一实施例中,将所述第二坐标映射至第三坐标系的实现方法包括:利用第二映射参数将所述第二坐标映射至所述第三坐标系,其中,所述第二映射参数通过拟合得到。
10.于所述第一方面的一实施例中,所述图像处理方法还包括:根据所述目标对象与所述目标区域的相对位置关系获取所述目标区域的受关注度。
11.于所述第一方面的一实施例中,所述图像处理方法还包括:对所述目标图像进行处理以获取其中包含的所述关键点的像点;根据各像点的置信度对所述关键点的像点进行过滤。
12.本发明的第二方面提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本发明第一方面任一项所述的图像处理方法。
13.本发明的第三方面提供一种电子设备,所述电子设备包括:存储器,存储有一计算机程序;处理器,与所述存储器通信相连,调用所述计算机程序时执行本发明第一方面任一项所述的图像处理方法。
14.如上所述,本发明一个或多个实施例中所述的图像处理方法具有以下有益效果:
15.所述图像处理方法能够根据目标图像中关键点的像点位置获取所述关键点在目标场景中的实际位置,进而根据所述关键点在所述目标场景中的实际位置判断目标对象与目标区域的相对位置关系,该方法具有准确率高以及基本无需人工参与等优点。
附图说明
16.图1显示为本发明所述图像处理方法于一具体实施例中的流程图。
17.图2a显示为本发明所述图像处理方法于一具体实施例中步骤s13的详细流程图。
18.图2b显示为本发明所述图像处理方法于一具体实施例中目标图像的示例图。
19.图2c显示为本发明所述图像处理方法于一具体实施例中相关点的位置关系示例图。
20.图3a显示为本发明所述图像处理方法于一具体实施例中步骤s14的详细流程图。
21.图3b显示为本发明所述图像处理方法于一具体实施例中步骤s142的详细流程图。
22.图4显示为本发明所述图像处理方法于一具体实施例中的关键步骤流程图。
23.图5a显示为本发明所述图像处理方法于一具体实施例中部署阶段的流程图。
24.图5b显示为本发明所述图像处理方法于一具体实施例中目标场景的示例图。
25.图5c显示为本发明所述图像处理方法于一具体实施例中目标场景的图纸示例图。
26.图5d显示为本发明所述图像处理方法于一具体实施例中计算阶段的流程图。
27.图6显示为本发明所述电子设备于一具体实施例中的结构示意图。
28.元件标号说明
29.600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电子设备
30.610
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
存储器
31.620
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
处理器
32.630
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
显示器
33.s11~s14
ꢀꢀꢀꢀꢀ
步骤
34.s131~s135
ꢀꢀꢀ
步骤
35.s141~s142
ꢀꢀꢀ
步骤
36.s1421~s1423 步骤
37.s41~s42
ꢀꢀꢀꢀꢀ
步骤
38.s511~s517
ꢀꢀꢀ
步骤
39.s521~s529
ꢀꢀꢀ
步骤
具体实施方式
40.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
41.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,图示中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。此外,在本文中,诸如“第一”、“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
42.于本发明的一实施例中提供一种图像处理方法。请参阅图1,显示为本实施例中所述图像处理方法的流程图。如图1所示,所述图像处理方法包括步骤s11至步骤s14。
43.步骤s11,获取目标图像,所述目标图像例如为监控摄像头等图像采集设备采集到的图像。所述目标图像包含目标对象的关键点的像点,也即所述关键点在所述目标图像中的对应点。所述目标对象例如为人体,但本发明并不以此为限。所述目标对象的关键点是指能够表明所述目标对象的位置的点,本实施例中对所述关键点的检测可以采用深度学习等方法实现。
44.可选地,当所述目标对象为人体时,所述关键点可以为人体关节处的节点,例如,鼻子、左眼、右眼、左耳、右耳、颈部、左肩、右肩、左臀、右臀、左膝盖、左脚踝、右膝盖、右脚踝、左手肘、左手腕、右手肘和/或右手腕等。
45.步骤s12,获取所述关键点的像点在第一坐标系中的坐标作为第一坐标,所述第一坐标系是基于所述目标图像建立的坐标系,所述第一坐标用于表示所述关键点的像点在所述目标图像中的位置。所述第一坐标系例如可以是基于所述目标图像的某一个角点或者中心点等为原点建立的二维坐标系,但本发明并不以此为限。
46.步骤s13,将所述第一坐标映射至第二坐标系以得到所述关键点在所述第二坐标系中的坐标作为第二坐标,所述第二坐标系是基于目标场景建立的坐标系,所述第二坐标用于表示所述关键点在所述目标场景中的实际位置。所述第二坐标系可以是基于所述目标
场景中任一点为原点所建立的三维坐标系。本实施例中,所述第二坐标系优选为基于图像采集设备在参考平面的垂直投影点为原点所建立的三维坐标系,所述参考平面例如为地面。
47.步骤s14,根据所述第二坐标获取所述目标对象与目标区域的相对位置关系,所述目标区域位于目标场景中,所述目标场景例如为零售店。其中,所述目标对象与所述目标区域的相对位置关系可以包括:所述目标对象位于所述目标区域内部或者所述目标对象位于所述目标区域外部。具体地,所述第二坐标能够表示所述目标对象在所述目标场景中的实际位置,所述目标区域为所述目标场景中的一个或多个区域,其范围可以根据实际需求进行配置或调整。因此,本实施例中基于所述第二坐标和所述目标区域的范围即可获取所述目标对象与所述目标区域的相对位置关系。
48.于本发明的一实施例中,将所述第一坐标映射至第二坐标系的实现方法包括:利用第一映射参数将所述第一坐标映射至所述第二坐标系,其中,所述第一映射参数包括用于采集所述目标图像的图像采集设备的高度、所述图像采集设备的水平方向视场角、所述图像采集设备的倾斜角度以及所述目标图像的分辨率。所述第一映射参数可以通过实际测量得到,例如,可以利用激光测距仪等测距设备获取所述图像采集设备距离参考平面的高度,可以利用角度测量仪获取所述图像采集设备的倾斜角度。
49.可选地,本实施例中所述第一映射参数可以在所述图像采集设备的安装或者部署过程中获取。此外,当所述第一映射参数发生变化时,例如,调整所述图像采集设备的高度和/或倾斜角度时,本实施例需要重新获取变化之后的所述第一映射参数。
50.可选地,本实施例中所述图像采集设备可以为定焦摄像头,此时无需获取所述图像采集设备的内参。
51.可选地,请参阅图2a,显示为本实施例中将所述第一坐标映射至第二坐标系以得到所述关键点的坐标作为第二坐标的一种实现方法。如图2a所示,本实施例中该方法包括以下步骤s131至步骤s135。
52.步骤s131,根据所述第一坐标和所述目标图像的中心点坐标获取第一距离和第二距离,所述第一距离是指所述关键点的像点与所述目标图像的中心点之间的横向距离,所述第二距离是指所述关键点的像点与所述中心点之间的纵向距离。
53.步骤s132,根据所述第一距离、所述第二距离、所述目标图像的分辨率以及所述图像采集设备的水平方向视场角获取第一偏移角。所述第一偏移角是指所述关键点相对于中心投影点在所述关键点与所述图像采集设备的连线方向的偏移角,所述中心投影点是指所述目标图像的中心点在参考平面上的投影点,其中,投影中心为所述图像采集设备。
54.步骤s133,根据所述第一偏移角、所述第一距离和所述第二距离获取第二偏移角。所述第二偏移角是指所述关键点相对所述中心投影点在竖直方向(y轴方向)的偏移角度。
55.步骤s134,根据所述图像采集设备的高度、所述第一偏移角、所述第二偏移角和所述图像采集设备的水平方向视场角获取第三距离和第四距离,所述第三距离是指所述关键点与所述第二坐标系的原点之间的横向距离,所述第四距离是指所述关键点与所述第二坐标系的原点之间的纵向距离。
56.步骤s135,根据所述第三距离和所述第四距离获取所述第二坐标。
57.接下来将通过一个具体实例对上述步骤进行详细说明。具体地,请参阅图2b和图
2c,其中,b’为关键点b在所述目标图像中的像点,o’为所述目标图像的中心点,c’为点b’在中心点o’的竖直方向(也即,y轴方向)上的投影点,px为所述第一距离,py为所述第二距离,二者可以根据所述目标图像得到。d表示所述图像采集设备在所述目标场景中的位置,例如可以为所述图像采集设备镜头的中心点。g表示d在参考平面上的垂直投影点,dg的长度即为所述图像采集设备的高度。o表示点o’在所述参考平面上的投影点,其投影中心为点d,用于表示点o’在所述参考平面的位置。c表示点c’在所述参考平面上的投影点,其投影中心为点d,用于表示点c’在所述参考平面的位置。所述图像采集设备的水平方向视场角α对应于图中的∠gdo,所述第一偏移角γ对应于图中的∠odb,所述第二偏移角β对应于图中的∠odc。此外,点d、点g和点o位于同一平面上,bc垂直于该平面,点a为od的延长线与c在其垂直投影的交点,也即,ac垂直于ad。所述第三距离为gc的长度,所述第四距离为bc的长度。
58.基于图2b和图2c,本实施例中步骤s132可以通过下式获取所述第一偏移角γ:其中imagew表示所述目标图像的宽度,hfov表示所述图像采集设备的水平方向视场角。例如,若解码后的所述目标图像的分辨率为1920
×
1080,hfov=52
°
,则该分辨率下的pixel
scale
为36.9。本实施例中步骤s133可以通过下式获取所述第二偏移角β:本实施例中步骤s134可以通过下式获取所述第三距离|gc|:|gc|=|dg|
×
tan(α+β),其中|dg|表示所述图像采集设备相对于所述参考平面的高度。本实施例中步骤s134可以通过下式获取所述第四距离|bc|:其中,|oc|=|gc|-|og|,|og|=|dg|
×
tan(α),(α),|ab|=|da|
×
tan(γ),|da|=|oa|+|do|。
59.通过上述方式,本实施例可以获取所述第三距离|gc|和所述第四距离|bc|。当以点g作为所述第二坐标系的原点时,所述第三距离|gc|和所述第四距离|bc|即为所述关键点b的横坐标(x坐标)和纵坐标(y坐标)。当所述第二坐标系为三维坐标系时,所述关键点b的竖坐标(z坐标)可以根据所述关键点b的类别获取,例如,若所述关键点b为左右脚踝中间点,则将其竖坐标配置为第一数值,若所述关键点b为左右臀中间点,则将其竖坐标配置为第二数值,以此类推。其中,所述第一数值和所述第二数值可以为预设值,但本发明并不以此为限。
60.请参阅图3a,于本发明的一实施例中,根据所述第二坐标获取所述目标对象与所述目标场景中的目标区域的相对位置关系的实现方法包括以下步骤s141和步骤s142。
61.步骤s141,将所述第二坐标映射至第三坐标系以得到所述关键点对应的映射点坐标作为第三坐标。
62.可选地,所述第三坐标系是基于所述目标场景的图纸建立的坐标系,但本发明并不以此为限。
63.步骤s142,根据所述第三坐标系中所述目标区域的特征点对应的映射点坐标以及所述第三坐标获取所述目标对象与所述目标区域的相对位置关系。其中,所述目标区域的
特征点用于定义所述目标区域的范围。例如,当所述目标区域为四边形时,所述目标区域的特征点可以为矩形的四个顶点。又例如,当所述目标区域为圆形时,所述目标区域的特征点可以为圆形的圆心以及圆周上的任意一点或多点。对于所述目标区域的任一特征点来说,该特征点对应的映射点坐标可以通过将该特征点的坐标映射至所述第三坐标系得到。基于所述目标区域的特征点对应的映射点坐标可以获取所述目标区域在所述第三坐标系中的范围,而基于所述第三坐标可以获取所述关键点在所述第三坐标系中的对应位置,因此,基于所述第三坐标和所述目标区域的特征点对应的映射点坐标即可判断所述关键点与所述目标区域的相对位置关系。
64.可选地,将所述第二坐标映射至所述第三坐标系的一种实现方法为:利用第二映射参数将所述第二坐标映射至所述第三坐标系,其中,所述第二映射参数通过拟合得到。
65.请参阅图3b,本实施例中通过拟合获取所述第二映射参数的一种实现方法包括以下步骤s1421至步骤s1423。
66.步骤s1421,在所述第三坐标系中获取所述图像采集设备对应的映射点与各所述特征点对应的映射点之间的距离,进而获取第一矩阵。所述第一矩阵中的各元素分别为所述图像采集设备对应的映射点与一个所述特征点对应的映射点之间的距离。特别地,当所述第三坐标系是基于所述目标场景的图纸建立的坐标系时,可以根据所述目标场景的图纸获取所述图像采集设备对应的映射点与各所述特征点对应的映射点之间的距离。
67.步骤s1422,获取所述图像采集设备与各所述特征点在所述参考平面上的距离,进而获取第二矩阵。所述第二矩阵中的各元素分别为所述图像采集设备与一个所述特征点在所述参考平面上的距离,也即,所述图像采集设备与一个所述特征点的连线在所述参考平面上的投影长度。
68.s1423,根据所述第一矩阵和所述第二矩阵进行参数拟合,从而得到所述第二映射参数。
69.可选地,步骤s1423中可以采用最小二乘法实现所述参数拟合,具体实现方式可以为:通过最小二乘法拟合以下二项式的系数来得到所述第二矩阵到所述第一矩阵的第二映射参数a0、a1和a2:f(x)=a0+a1×
x+a2×
x2。
70.需要说明的是,获取所述第二映射参数和/或获取所述目标区域的特征点对应的映射点坐标的过程可以在所述图像采集设备的标定过程中完成,但本发明并不以此为限。
71.于本发明的一实施例中,所述图像处理方法还包括:根据所述目标对象与所述目标区域的相对位置关系获取所述目标区域的受关注度。
72.具体地,本实施例中可以利用所述图像采集设备获取多帧目标图像,并根据各帧所述目标图像获取所述目标对象与所述目标区域的相对位置关系。若根据某一帧目标图像得到所述目标对象位于所述目标区域之内,而根据该帧目标图像的上一帧目标图像得到所述目标对象位于所述目标区域之外,则将所述目标对象的状态更新为位于所述目标区域之内,并将所述目标区域的受关注程度加一。若根据某一帧目标图像得到所述目标对象位于所述目标区域之外,而根据该帧目标图像的上一帧目标图像得到所述目标对象位于所述目标区域之内,则将所述目标对象的状态更新为位于所述目标区域之外。通过此方式能够获取一段时间(例如,一天)内所述目标区域的总受关注程度。
73.请参阅图4,于本发明的一实施例中,所述图像处理方法还包括以下步骤s41和步
骤s42。
74.步骤s41,对所述目标图像进行处理以获取其中包含的所有关键点的像点,各所述关键点的像点组成一像点集合。
75.步骤s42,根据各像点的置信度对所述关键点的像点进行过滤。例如,可以设置一置信度阈值,并根据所述置信度阈值对所述像点集合中的像点进行过滤,以保留置信度高于所述置信度阈值的像点,并删除置信度低于所述置信度阈值的像点。
76.于本发明的一实施例中,所述图像处理方法包括部署阶段和计算阶段。所述部署阶段用于实现所述图像采集设备的标定、所述目标区域的标定、所述第一映射参数的标定以及所述第二映射参数的标定。所述计算阶段用于对所述图像采集设备采集到的目标图像进行处理,以检测所述目标图像中的人体并计算人体与所述目标区域的相对位置,且获取所述目标区域的受关注程度。
77.具体地,请参阅图5a,本实施例中所述部署阶段包括以下步骤s511至步骤s517。
78.步骤s511,获取第一映射参数,所述第一映射参数包括用于采集所述目标图像的图像采集设备的高度、所述图像采集设备的水平方向视场角、所述图像采集设备的倾斜角度以及所述目标图像的分辨率。基于所述第一映射参数可以获得单位角度对应的像素数量pixel
scale
。
79.步骤s512,获取标定图像,所述标定图像包含所述目标场景中的所述目标区域,所述目标区域包含多个特征点。例如,图5b显示为所述标定图像的示例图,其中包含柜台s以及目标区域i,所述目标区域i的特征点包括顶点e1、e2、b1、b2,还可以包括所述柜台s与所述目标区域i相邻的顶点t1和t2。
80.步骤s513,在所述标定图像中获取所述特征点的像点在第一坐标系中的坐标作为第四坐标。在图5b中,步骤s513可以获取e1、e2、b1、b2、t1和t2的坐标,当t1和b1并非都可见时可以只获取二者之一的坐标,当t2和b2并非都可见时可以只获取二者之一的坐标。
81.步骤s514,利用所述第一映射参数将所述第四坐标映射到第二坐标系中以获取第五坐标,所述第五坐标是所述特征点在所述第二坐标系中的坐标。该映射过程与上述步骤s13类似,此处不作过多赘述。
82.步骤s515,根据所述第五坐标获取所述图像采集设备与各所述特征点在所述参考平面上的距离,并获取第二矩阵。例如,可以分别获取所述图像采集设备与特征点b1、b2、e1和e2的连线在所述参考平面上的投影的长度作为所述图像采集设备与特征点b1、b2、e1和e2的距离,并根据这四个距离生成一个1
×
4的矩阵作为所述第二矩阵。
83.步骤s516,根据所述目标场景的图纸获取所述图像采集设备对应的映射点与各所述特征点对应的映射点之间的距离,并获取第一矩阵。具体地,所述图像采集设备对应的映射点可以为所述图纸中表示所述图像采集设备的位置的点。所述特征点对应的映射点可以为所述图纸中表示所述特征点位置的点。例如,请参阅图5c,显示为所述目标场景的图像的示例图,此时,可以获取该图纸中所述图像采集设备对应的映射点c_g到各所述特征点对应的映射点c_g_b1、c_g_b2、c_g_e1和c_g_e2的距离,并根据这四个距离生成一个1
×
4的矩阵作为所述第一矩阵。
84.步骤s517,根据所述第一矩阵和所述第二矩阵进行拟合以获取所述第二映射参数。例如,可以采用最小二乘法实现所述拟合。
85.根据以上描述可知,上述步骤s511至步骤s517可以完成设备的部署。如果在应用过程中所述图像采集设备的安装角度、高度等参数发生改变,可以重新执行上述步骤s511至步骤s517中的部分或者全部步骤。
86.请参阅图5d,本实施例中所述计算阶段包括以下步骤s521至步骤s529。
87.步骤s521,获取目标图像,所述目标图像包括所述目标区域。
88.步骤s522,对所述目标图像进行关键点检测,以获取所述目标图像中所有的人体关键点的像点。
89.步骤s523,根据各像点的置信度分数对所述人体关键点的像点进行过滤。
90.步骤s524,基于预设的规则从所述人体关键点的像点中选取用于计算的目标关键点及其对应的高度。所述预设的规则例如为:若所述目标图像中包含左右脚踝的像点,则将左右脚踝的中间点作为所述目标关键点,其对应的高度为第三数值,例如0;否则,若所述目标图像中包含左右臀的像点,则将左右臀的中间点作为所述目标关键点,其对应的高度为第四数值,例如1;否则,若所述目标图像中包含鼻子、左右眼或左右耳,则选择鼻子、左右眼或者左右耳的中间点作为所述目标关键点,其对应的高度为第五数值,例如1.7;否则,将检测框的中轴线与顶边的交点作为所述目标关键点,其对应的高度为第六数值,例如1.7。
91.步骤s525,获取所述目标关键点的像点在所述目标图像中的坐标作为第六坐标。
92.步骤s526,利用所述第一映射参数将所述第六坐标映射到第二坐标系中,以获取所述目标关键点在所述第二坐标系中的坐标作为第七坐标。
93.步骤s527,利用所述第二映射参数将所述第七坐标映射到第三坐标系中,以获取所述目标关键点对应的映射点坐标。
94.步骤s528,根据所述第三坐标系中所述目标区域的特征点对应的映射点坐标以及所述目标关键点对应的映射点坐标获取所述目标对象与所述目标区域的相对位置关系。
95.步骤s529,根据所述目标对象与所述目标区域的相对位置关系获取所述目标区域的受关注程度。
96.基于以上对所述图像处理方法的描述,本发明还提供一种计算机可读存储介质,其上存储有计算机程序。所述计算机程序被处理器执行时实现本发明所述的图像处理方法。
97.本发明还提供一种电子设备。请参阅图6,于本发明的一实施例中,电子设备600包括存储器610和处理器620。所述存储器610存储有计算机程序,所述处理器620与所述存储器610通信相连,调用所述计算机程序时执行本发明所述的图像处理方法。
98.可选地,所述电子设备600还可以包括显示器630。所述显示器630与所述存储器610和所述处理器620通信相连,用于显示所述图像处理方法的相关gui交互界面。
99.本发明所述的图像处理方法的保护范围不限于本实施例列举的步骤执行顺序,凡是根据本发明的原理所做的现有技术的步骤增减、步骤替换所实现的方案都包括在本发明的保护范围内。
100.综上所述,本发明所述的图像处理方法能够准确快速地获取目标对象与目标区域的相对位置关系,进而能够获取所述目标区域的受关注程度。此外,所述图像处理方法定义了完整的部署和计算方法,能够有效提高工程部署效率,实现顾客关注度统计并且减少后续维护工作的成本。因此,本发明有效克服了现有技术中的种种缺点而具高度产业利用价
值。
101.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1