一种轨道板裂缝检测方法、系统及存储介质与流程
1.本发明涉轨道检测技术领域,更具体地说,涉及一种轨道板裂缝检测方法、系统及存储介质。
背景技术:
2.高铁轨道板裂缝是混凝土结构中普遍存在的一种现象,它的出现不仅会降低建筑物的抗渗能力,影响建筑物的使用功能,而且会引起钢筋的锈蚀,混凝土的碳化,降低材料的耐久性,影响建筑物的承载能力,因此要对高铁轨道板裂缝进行认真研究、区别对待,采用合理的方法进行处理。而高铁轨道板裂缝的成因有多种,当前为了保障铁路安全运营,亟需对轨道板裂缝进行精准检测,并加以控制。现有技术中,考虑先对需要进行轨道板裂缝整治的路段进行数据调查,之后再人为判断裂缝产生的严重程度,并据此来确定整治施工的优先级和方法。然而,这种以人工为主的检测方式,却存在人工成本高,检测速度慢的问题,且,容易漏检,由此降低了轨道板裂缝检测准确度。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有的技术方案存在的轨道板裂缝检测准确度低的技术问题,提供一种轨道板裂缝检测方法、系统及存储介质。
4.本发明解决其技术问题所采用的技术方案是:构造一种轨道板裂缝检测方法,包括:
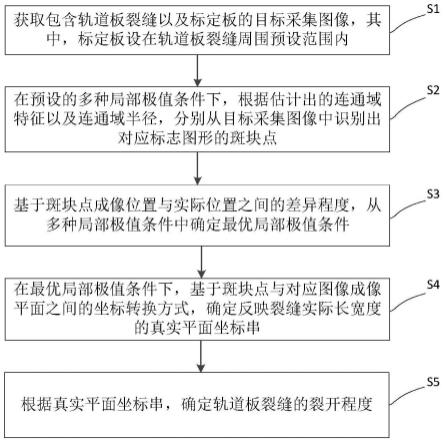
5.s1、获取包含轨道板裂缝以及标定板的目标采集图像,其中,所述标定板设在所述轨道板裂缝周围预设范围内;
6.s2、在预设的多种局部极值条件下,根据估计出的连通域特征以及连通域半径,分别从所述目标采集图像中识别出对应标志图形的斑块点;
7.s3、基于斑块点成像位置与实际位置之间的差异程度,从所述多种局部极值条件中确定最优局部极值条件;
8.s4、在所述最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串;
9.s5、根据所述真实平面坐标串,确定轨道板裂缝的裂开程度。
10.本技术公开的一种轨道板裂缝检测系统,所述系统包括图像获取模块、斑块识别模块、条件筛选模块、坐标转换模块以及程度检测模块,其中:
11.所述图像获取模块,用于获取包含轨道板裂缝以及标定板的目标采集图像,其中,所述标定板设在所述轨道板裂缝周围预设范围内;
12.所述斑块识别模块,用于在预设的多种局部极值条件下,根据估计出的连通域特征以及连通域半径,分别从所述目标采集图像中识别出对应标志图形的斑块点;
13.所述条件筛选模块,用于基于斑块点成像位置与实际位置之间的差异程度,从所述多种局部极值条件中确定最优局部极值条件;
14.所述坐标转换模块,用于在所述最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串;
15.所述程度检测模块,用于根据所述真实平面坐标串,确定轨道板裂缝的裂开程度。
16.本技术公开的一种可读存储介质,所述可读存储介质中包括轨道板裂缝检测方法程序,所述轨道板裂缝检测方法程序被处理器执行时,实现如上述所述的方法的步骤。
17.实施本发明的一种轨道板裂缝检测方法、系统及存储介质,一方面,基于预设的多种局部极值条件,从综合标定板和轨道板裂缝的目标采集图像中检测出相应的斑块点,由于其拟合出的中心精度较高,能够在提高斑块点识别准确度的情况下,保证轨道板裂缝的检测准确度。另一方面,基于斑块点实际位置与对应成像位置之间的差异取值确定最优局部极值条件,能够降低斑块点的识别误差,提高测量精准度。最后,由于标定板平面可以近似于轨道板平面,基于标点板与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串,并基于该真实平面坐标串反推轨道板裂缝的裂开程度,这样即使在距离、角度等未知的情况下,也能够保证对轨道板裂缝裂开程度的精准检测,提高了系统检测效率。
附图说明
18.下面将结合附图及实施例对本发明作进一步说明,附图中:
19.图1是本发明的一个实施例中的一种轨道板裂缝检测方法的流程图;
20.图2是本发明的一个实施例中的一种轨道板裂缝检测系统的系统结构图。
具体实施方式
21.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
22.在本发明的一个或多个实施例中,如图1所示,提供了的一种轨道板裂缝检测方法,以该方法应用于计算机设备(该计算机设备具体可以是终端或服务器,终端具体可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板计算机和便携式可穿戴设备。服务器可以用独立的服务器或者是多个服务器组成的服务器集群)为例进行说明,包括以下步骤:
23.步骤s1,获取包含轨道板裂缝以及标定板的目标采集图像,其中,所述标定板设在所述轨道板裂缝周围预设范围内。
24.具体的,目标采集图像基于预设的拍摄设备,例如,手机和照相机等拍摄所得。计算机设备将通过预设的连接协议,例如,通过tcp连接协议、udp连接协议等,向该拍摄设备请求连接,并在确定成功连接到该拍摄设备时,获取经由拍摄设备传输的目标采集图像。
25.在其中一个实施例中,所述标定板中包含多个反映识别特征的标记点;针对不同规模的轨道板裂缝,其对应标定板的规格也有所不同,其中:针对不同规格标定板的识别,将基于预设的区分方式进行区分,所述区分方式包括基于颜色进行区分的第一区分方式、基于形状进行区分的第二区分方式、以及基于尺寸大小进行区分的第三区分方式中的至少一种。
26.需要说明的是,在布设标定板时,可以利用不同规格的标定板,对不同规模的轨道
板裂缝进行标定。另外,为了提高裂缝的观测精度,可以选用较小(当前实施例中不对标定板的具体尺寸进行限定,不同实施例中,其所取值可以基于用户需求得以确定)的标定板,而为了保证能够对标定板的整体拍摄,此时,需要将拍摄镜头距离拉近到裂缝局部。另外,拍摄过程中也需要尽量稳住设备,保证设备在尽量不晃动的情况下,能够较好的拍摄得到所需的图片。对标定板的规格可以用颜色和/或图案的不同来进行预先配置,以便于系统可以自动化适配对应规格的标定板。
27.步骤s2、在预设的多种局部极值条件下,根据估计出的连通域特征以及连通域半径,分别从所述目标采集图像中识别出对应标志图形的斑块点。
28.具体的,计算机设备采用基于局部极值的分水岭检测方法,对于从目标采集图像中检测出对应标定板上的图形的斑块点。当然,当前实施例中也可以基于其他的检测方法从所述目标采集图像中识别出对应标志图形的斑块点,例如,形心法以及解析法等。
29.在其中一个实施例中,计算机设备可以综合基于不同方法得到的检测结果,确定对应识别出的目标斑块点,以此保证斑块点的检测精准度。示例性的,计算机设备可以基于平均值计算、加权求和计算等方法进行综合计算,本技术实施例对上述的综合计算方法不作限定,不同实施例中可以基于数据间差异大小、整体数据量以及对应所取最大值以及最小值进行灵活调整。
30.在其中一个实施例中,计算机设备基于目标采集图像中各像素点所取到的坐标、以及不同像素点之间的连接关系进行连通域分析。后续,在从目标采集图像中识别出相应连通域时,计算机设备再根据该连通域的参数信息,例如,尺寸、半径以及边界信息等,从识别出的各连通域中筛选出存在缺陷的目标连通域,例如,连通域边界超出预设的边界范围,连通域过大不满足预设筛选条件等。
31.步骤s3,基于斑块点成像位置与实际位置之间的差异程度,从所述多种局部极值条件中确定最优局部极值条件。
32.具体的,计算机设备通过计算出每个局部极值条件下,斑块点成像位置与实际位置之间的差异取值,通过预设的排序算法,例如,二分法、冒泡排序法等,对所得的各项差异取值进行排序。之后,再基于所得的排序结果,将对应差异取值最小的局部极值条件作为最优局部极值条件。在一个实施例中,为保证排序准确性,计算机设备可连续多次对所得的各项差异取值进行排序,并在确定出现多次相同的目标排序结果,且该目标排序结果出现的次数大于预设阈值时,基于该目标排序结果进行最优局部极值条件的筛选。
33.在其中一个实施例中,计算机设备还可以基于预设的筛选规则从所得的斑块点中删除干扰因素,例如,计算机设备可以基于斑块点的像素坐标、半径、圆度等属性信息,将该属性信息与标定图形的既定特征,例如,圆度、半径范围以及坐标分布行列特征等进行匹配,并基于所得的匹配结果进行干扰因素的识别,以保证斑块点的识别准确度。
34.步骤s4,在所述最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串。
35.具体的,计算机设备在所得的最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定成像图像中各像素点的成像位置与实际位置之间的映射关系。之后,再基于该映射关系,对所确定的反映成像图像中裂缝拟定长宽度的平面坐标串进行转换,以得到反映裂缝实际长宽度的真实平面坐标串。
36.步骤s5,根据所述真实平面坐标串,确定轨道板裂缝的裂开程度。
37.具体的,计算机设备在获取到含有轨道板的目标采集图像之后,可以利用沿着轨道板图像画线的方式,得到相应的轨道板图形。其中,当计算机设备将该目标采集图像显示在预设的显示页面时,可以通过插值显示的方式实现目标图像的放大缩小。需要说明的是,轨道板图形屏幕坐标串可以是在目标图像放大时点击得到的,这样在还原到轨道板图形的像素坐标时,得到的就是亚像素坐标,如此,可以更精确的测量出轨道板图形的长度和宽度。
38.当前实施例中,计算机设备利用标定板上的图形在成像图像上的位置,结合标定板图形的实际坐标位置,可以计算得出标定板平面(近似于轨道板平面)与成像平面之间的坐标转换方式。后续,通过量测到的轨道板裂缝图形,得到裂缝待测的维度(长度或宽度)线的像素坐标串。之后,计算机设备再基于前述得到的坐标转换方式,计算得到像素坐标串对应的真实平面坐标串,并基于该真实平面坐标串计算出裂缝待测的真实维度大小。
39.上述轨道板裂缝检测方法,一方面,基于预设的多种局部极值条件,从综合标定板和轨道板裂缝的目标采集图像中检测出相应的斑块点,由于其拟合出的中心精度较高,能够在提高斑块点识别准确度的情况下,保证轨道板裂缝的检测准确度。另一方面,基于斑块点实际位置与对应成像位置之间的差异取值确定最优局部极值条件,能够降低斑块点的识别误差,提高测量精准度。最后,由于标定板平面可以近似于轨道板平面,基于标点板与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串,并基于该真实平面坐标串反推轨道板裂缝的裂开程度,这样即使在距离、角度等未知的情况下,也能够保证对轨道板裂缝裂开程度的精准检测,提高了系统检测效率。
40.在其中一个实施例中,步骤s2中,针对预设的多种局部极值条件,在相应局部极值条件下,根据估计出的连通域特征以及连通域半径,从所述目标采集图像中识别出对应标志图形的斑块点,包括:
41.步骤s21,对所述目标采集图像进行多间隔区域二值化处理,得到相应的二值化图像。
42.具体的,通过拍摄设备获取到的图像为彩色的图像彩色图像主要分为两种类型,rgb类型及cmyk类型。其中,rgb类型的彩色图像是由三种不同颜色成分组合而成,一个为红色、一个为绿色以及另一个为蓝色。而cmyk类型的彩色图像则由四个颜色成分组成:青c、品m、黄y、黑k。需要说明的是,cmyk类型的彩色图像主要用于印刷行业。
43.由于,每个图像的像素通常对应于二维空间中一个特定的位置,并且有一个或者多个与那个点相关的采样值组成数值。而,灰度图像也称为灰阶图像,灰度图像中每个像素可以由0(黑)到255(白)的亮度值表示,其中,0-255之间表示不同的灰度级。
44.在一个实施例中,将彩色图像转化成为灰度图像的过程称为图像的灰度化处理。其中,在rgb模型中,如果r=g=b时,则彩色将表示一种灰度颜色,r=g=b的值也叫灰度值。因此,灰度图像中每个像素只需一个字节存放灰度值(又称强度值、亮度值),其灰度范围为0-255。由于,彩色图像中的每个像素的颜色由r、g、b三个分量决定,而每个分量又有255个值可取,这样一个像素点将存在1600多万(255255255)的颜色的变化范围。而灰度图像一个像素点的变化范围为255种。所以,在数字图像处理中,一般先将各种格式的图像转变成灰度图像,以使后续的图像计算量变得少一些,提高数据运算效率。
45.步骤s22,从所述二值化图像中提取出相应的连通域,并计算相应区域的连通中心点。
46.具体的,在一副二值化图像中,将表征黑色的像素点标记为0,将表征白色的像素点表征为1,相应多个白色像素点或黑色像素点连在一起的区域,即为所求的连通区域。
47.在其中一个实施例中,由于这些连通区域可能是不规则的图形形状。所以,所求得的连通中心点也不一定是在标准的中心位置,其可能是靠近区域中心的位置、或是远离区域中心的位置等,不同实施例中,计算机设备将基于连通区域的形状确定连通中心点的计算方式,例如,在确定连通区域的形状为正方形时,计算机设备可以基于正方形四个顶点所取到的坐标确定连通中心点的坐标,本技术实施例对此不作限定。
48.步骤s23,将所得的连通中心点进行拟合归类,得到相应的中心点集,以及,根据所得的中心点集进行连通域特征以及连通域半径的估计。
49.步骤s24、根据估计得到的连通域特征以及连通域半径,从所述目标采集图像中识别出对应标志图形的斑块点。
50.上述实施例,基于局部极值的分水岭检测从综合标定板和轨道板裂缝的目标采集图像中检测出相应的斑块点,并且拟合出的中心精度较高,能够提高斑块点的识别准确度,保障了轨道板裂缝裂开程度的判断准确度。
51.在其中一个实施例中,步骤s3中,所述基于斑块点成像位置与实际位置之间的差异程度,从所述多种局部极值条件中确定最优局部极值条件,包括:
52.步骤s31,获取斑块点的实际位置。
53.具体的,计算机设备可以将获取到的斑块点的实际位置存储到预设的存储区域,之后,通过向该存储区域进行数据请求,以获取到所需的数据。
54.在其中一个实施例中,计算机设备将待存储的数据,按照预设的数据划分策略,例如分类划分,将其划分成多个分类数据集,并将各个分类数据集分配不同的数据库节点;其中,每个数据库节点之间相互独立,且每个数据库节点分别对应存储一类数据,后续,在需要进行数据反馈时,计算机设备再基于所确定的检索条件,从数据库节点进行所需数据的检索以及获取。
55.步骤s32,每种局部极值条件下,分别确定斑块点在所述目标采集图像中的成像位置,并计算所述实际位置与所述成像位置之间的差异取值。
56.步骤s33,从所得的各项差异取值中,筛选出取值最小的目标差异取值,并将所述目标差异取值所对应的局部极值条件作为最优局部极值条件。
57.上述实施例,基于斑块点实际位置与对应成像位置之间的差异取值确定最优局部极值条件,能够降低斑块点的识别误差,提高测量精准度。
58.在其中一个实施例中,步骤s4中,所述在所述最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串,包括:
59.步骤s41,在所述最优局部极值条件下,基于斑块点在图像坐标系下的成像坐标点,以及在标定板坐标系下的实际坐标点,确定斑块点与对应图像成像平面之间的坐标转换方式。
60.具体的,步骤s41中,所述基于斑块点在图像坐标系下的成像坐标点,以及在标定
板坐标系下的实际坐标点,确定斑块点与对应图像成像平面之间的坐标转换方式,包括:
61.步骤s411,根据图像成像原理,在所述成像坐标点与所述实际坐标点之间建立一一对应的映射关系。
62.具体的,计算机设备可以基于图像成像原理,根据成像坐标点与实际坐标点之间的映射关系,构建相应的映射表。后续,在需要查询所需的目标实际坐标点时,计算机设备可以基于该目标成像坐标点的属性信息,构建相应的目标地址查询指令,之后,再根据该目标地址查询指令和映射表筛选出与该目标地址查询指令所对应的目标实际坐标点。
63.步骤s412,根据建立的映射关系,确定斑块点与对应图像成像平面之间的坐标转换方式。
64.步骤s42,获取鼠标移动数据,所述鼠标移动数据包括通过鼠标点击方式对目标采集图像中记录的拍摄对象进行描绘,同步产生的描绘数据。
65.步骤s43,根据所述描绘数据,确定反映裂缝拟定长宽度的像素坐标串,并基于所述坐标转换方式将所述像素坐标串转换为反映裂缝实际长宽度的真实平面坐标串。
66.具体的,计算机设备可以基于预设的显示屏幕显示获取到的目标采集图像,并在确定鼠标点击动作触发时,确定点击范围内是否存在反映轨道板裂缝的点击区域,若是,则基于该点击区域在图像坐标系中的位置,确定反映裂缝拟定长宽度的像素坐标串。后续,计算机设备再通过基于步骤s41所确定的坐标转换方式,计算出对应真实的空间坐标串,从而得到真实的裂缝维度大小。
67.在其中一个实施例中,计算机设备还可以基于机器学习算法,通过学习裂缝特征,对裂缝图形实现机器自动描绘。当机器自动描绘出裂缝图形后,再使用坐标转换函数计算出其真实的空间坐标串,从而得到真实的裂缝维度大小,当然,利用机器学习的方法可以实现轨道板裂缝的全自动识别,提高系统自动化执行效率。
68.在其中一个实施例中,在确定轨道板裂缝在所述目标采集图像中呈曲面状时,所述方法还包括:采用曲面拟合法,确定所述最优局部极值条件下,斑块点与对应图像成像平面之间的目标坐标转换方式,并基于所述目标坐标转换方式,确定反映裂缝实际长宽度的真实曲面坐标串。
69.具体的,曲面拟合法是用连续曲面近似地刻画或比拟平面(曲面)上离散点组所表示的坐标之间的函数关系的一种数据处理方法。考虑到球面像差、像散、像场弯曲和畸变像差等轴对称像差及不对心像差和薄棱镜像差等非轴对称像差,同时考虑了摄像机ccd感光像平面、测量物体表面与摄像机光轴的不严格垂直性,在一个实施例中,计算机设备将建立相应的三次多项式,并基于该三次多项式确定像点坐标与物坐标之间的变换关系。
70.在其中一个实施例中,针对建立得到的三次多项式,每一组方程式中将设有多个未知数。在一个实施例中,针对未知数的求解,计算机设备可以根据最小二乘法分别对各组方程式进行求解,得到多个方程组。之后,再用解矩阵方程的方法,求出各方程组分别附带的系数,并在获得相应处理参数(例如,像点坐标)的情况下,即可实现图像坐标系与真实世界坐标系之间的转换,实现了系统标定。
71.在其中一个实施例中,该方法还包括:
72.步骤s6,针对呈中心对称的标志图形,采用形心法从所述目标采集图像中识别出对应标志图形的斑块点,其中:
73.步骤s61,对所述目标采集图像进行二值化分割,得到多个分割区域。
74.步骤s62,基于斑块点的识别特征,从所述多个分割区域中筛选出所需的目标区域,并基于所述目标区域确定对应标志图形的斑块点。
75.在其中一个实施例中,该方法还包括:
76.步骤s7,针对呈不规则形状的标志图形,采用解析法从所述目标采集图像中识别出对应标志图形的斑块点,其中:
77.步骤s71,基于斑块点的识别特征,从所述目标采集图像中识别出斑块点的大致轮廓。
78.步骤s72,基于识别出的斑块点的大致轮廓,采用拟合的方法得到待识别目标的解析方程,并根据所述解析方程求得目标点的像素坐标。
79.步骤s73,根据所述目标点的像素坐标,从所述目标采集图像中识别出对应标志图形的斑块点。
80.上述实施例,受噪声影响小,在目标物上有阴影遮挡导致部分灰度发生变化时,基于解析法仍能正确得出目标点的像素坐标,其稳定性较高,能够提高斑块点识别准确度以及提高识别效率。
81.请参考图2,本技术公开了一种轨道板裂缝检测系统200,该系统200包括图像获取模块201、斑块识别模块202、条件筛选模块203、坐标转换模块204以及程度检测模块205,其中:
82.所述图像获取模块201,用于获取包含轨道板裂缝以及标定板的目标采集图像,其中,所述标定板设在所述轨道板裂缝周围预设范围内。
83.所述斑块识别模块202,用于在预设的多种局部极值条件下,根据估计出的连通域特征以及连通域半径,分别从所述目标采集图像中识别出对应标志图形的斑块点。
84.所述条件筛选模块203,用于基于斑块点成像位置与实际位置之间的差异程度,从所述多种局部极值条件中确定最优局部极值条件。
85.所述坐标转换模块204,用于在所述最优局部极值条件下,基于斑块点与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串。
86.所述程度检测模块205,用于根据所述真实平面坐标串,确定轨道板裂缝的裂开程度。
87.上述轨道板裂缝检测系统,一方面,基于预设的多种局部极值条件,从综合标定板和轨道板裂缝的目标采集图像中检测出相应的斑块点,由于其拟合出的中心精度较高,能够在提高斑块点识别准确度的情况下,保证轨道板裂缝的检测准确度。另一方面,基于斑块点实际位置与对应成像位置之间的差异取值确定最优局部极值条件,能够降低斑块点的识别误差,提高测量精准度。最后,由于标定板平面可以近似于轨道板平面,基于标点板与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串,并基于该真实平面坐标串反推轨道板裂缝的裂开程度,这样即使在距离、角度等未知的情况下,也能够保证对轨道板裂缝裂开程度的精准检测,提高了系统检测效率。
88.本技术公开的一种可读存储介质,该可读存储介质中包括轨道板裂缝检测方法程序,该轨道板裂缝检测方法程序被处理器执行时,实现如上述任一项方法实施例中公开的方法的步骤。
89.上述存储介质,一方面,基于预设的多种局部极值条件,从综合标定板和轨道板裂缝的目标采集图像中检测出相应的斑块点,由于其拟合出的中心精度较高,能够在提高斑块点识别准确度的情况下,保证轨道板裂缝的检测准确度。另一方面,基于斑块点实际位置与对应成像位置之间的差异取值确定最优局部极值条件,能够降低斑块点的识别误差,提高测量精准度。最后,由于标定板平面可以近似于轨道板平面,基于标点板与对应图像成像平面之间的坐标转换方式,确定反映裂缝实际长宽度的真实平面坐标串,并基于该真实平面坐标串反推轨道板裂缝的裂开程度,这样即使在距离、角度等未知的情况下,也能够保证对轨道板裂缝裂开程度的精准检测,提高了系统检测效率。
90.以上仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1