基于障碍物矢量图的压缩感知随机炮点设计方法与流程
1.本发明涉及一种基于障碍物矢量图的压缩感知随机炮点设计方法,属于地球物理勘探技术领域。
背景技术:
2.随着地震勘探程度的日益加深,地震勘探工作量逐渐加大。在地震资料采集过程中,面临着越来越多的城镇、村庄、渔池等大型障碍物,在实际地震勘探采集施工过程中,布设的炮点检波点遇到复杂地表情况(如城镇、村庄、水库、养殖池等)而无法按照设计正常布设,出现炮检距过大,会导致浅层资料有所缺失,深层资料的覆盖次数分布不均匀或减少,进而降低资料信噪比影响资料品质。而目前的该类采集障碍区变观设计都是利用常用的商业软件(seisway、mesa、kelang、omni)采取就近原则自动避障,加上人工干预调整和选炮,依靠多次进行人工关停或挪动炮点,直至相对合适;然后进行覆盖次数分析,分析出资料缺失区域,计算出浅层资料缺失还有覆盖次数的减少情况。
3.但是这种常规障碍区变观设计存在效率低、精度不高、不是全局最优解的问题,从而会导致激发困难,无法获得高品质地震采集数据,难以满足地质勘探任务的要求,严重影响后期储层预测的精度。
4.压缩感知理论因其特有的优点得到广泛关注。它利用数据可稀疏表达的性质,采用远低于传统尼奎斯特采样率的稀疏随机采样,通过稀疏约束的优化算法重建完整的数据信号。压缩感知随机地震数据采集和数据重建可以在很大程度上解决以上复杂地表障碍区造成的地震资料采集缺失问题,即优先在观测系统设计阶段考虑障碍物的分布,并利用程序语言实现障碍物的自动识别,并予以区分,利用jitter采样,设计障碍区炮检点的非规则设计,有效地避免了后续障碍物位置的变观设计,后续利用重构的方法也可以在一定程度上减少障碍物区造成的资料缺口,使地震剖面更加连续,资料缺失大幅减少。
技术实现要素:
5.本发明的目的在于提供一种基于障碍物矢量图的压缩感知随机炮点设计方法,基于压缩感知理论,采用贪心序贯算法压制感知矩阵的互相关值,进行优化设计过障碍物区的随机炮点,来解决以上障碍物区观测系统设计现状的难题,
6.为实现上述目的,本发明采取的技术方案是:一种基于障碍物矢量图的压缩感知随机炮点设计方法,其包括以下步骤:
7.步骤1、统计工区内所有障碍物的名称及其对应的障碍物分布位置的起止坐标信息,生成全工区的障碍物文件;
8.步骤2、依据局部障碍物变观位置,从步骤一中的障碍物文件提取目标区域的障碍物信息,并对全工区障碍物的位置信息进行01分类标识,其中0代表该区域为障碍物区域,无法布设炮点;1代表该区域可以布设炮点;
9.步骤3、按照工区范围和地质任务,确定炮线的布设范围,确定炮线数和炮点数;
10.步骤4、按照炮线的布设范围和炮线的数目,利用贪心序贯的方法优化设计炮线的位置;
11.步骤5、设计炮点,根据确定的炮线的位置,优化设计炮点的布设位置;
12.步骤6、根据优化设计的炮线和炮点的位置,完成基于障碍物矢量图的压缩感知随机炮点位置设计。
13.作为本方案的进一步优选,所述步骤4中,优化设计炮线位置的方法为:假设炮线数为sr,等效为一条线上的sr个点的优化设计,具体包括以下步骤:
14.步骤41,确定炮线的数目sr和垂直炮线方向的网格间距,将所有垂直炮线的网格点作为候选采样点;
15.步骤42,设采样矩阵为φ,定义ψ=φfh,其中,f表示傅里叶变换,上标h表示共轭转置,ψ记为感知矩阵,设感知矩阵ψ的任意两个列向量分别为ψi和ψj,列向量间的最大互相关值μ记为:
[0016][0017]
步骤43,假设炮线的采样矩阵为φsr,遍历所有候选采样点,其中当该候选采样点存在障碍物信息且标识为0时,代表该候选采样点位置不可以布设炮线;继续候选下一个采样点,直至该候选采样点位置标识为1时,计算将每个候选采样点加入采样矩阵φsr后的μsr值,取使μsr值最小的候选点作为新增采样点,更新采样矩阵φsr;
[0018]
步骤44,重复步骤43的操作,直到炮线数目达到规定的数目;
[0019]
步骤45,在初步确定φsr后,以每个采样点的位置为基准做随机抖动,进行采样微调,以φsr=argminμsr为目标,寻找使得μsr最小时的采样矩阵φsr,从而确定最终的炮线位置。
[0020]
作为本方案的进一步优选,所述步骤5中,优化设计炮点的布设位置,包括以下步骤:
[0021]
步骤51,确定炮点的数目pr和网格间距,将炮点布设范围内的所有网格点作为候选采样点;
[0022]
步骤52,假设炮点的采样矩阵为φpr,在炮线采样矩阵φsr的基础上,遍历所有候选采样点,其中当该候选采样点存在障碍物信息且标识为0时,代表该候选采样点位置不可以布设炮线;继续候选下一个采样点,直至该候选采样点位置标识为1时,计算将每个候选采样点加入采样矩阵φpr后的μpr值,取使μpr值最小的候选点作为新增采样点,更新采样矩阵φpr;
[0023]
步骤53,重复步骤52的操作,直到炮点数达到规定的数目;
[0024]
步骤54,在初步确定φpr后,以每个采样点的位置为基准做随机抖动,进行采样微调,以φpr=argminμpr为目标,寻找使得μpr最小时的采样矩阵φpr,从而确定所有炮点的最终布设位置。
[0025]
本发明的有益效果是:本发明中的基于障碍物矢量图的压缩感知随机炮点设计方法,根据压缩感知理论,利用贪心序贯的策略,借助已知的障碍物统计信息,优化设计障碍物区的地震采集非规则观测系统。较常规高密度规则采集更高效,避免后续障碍物区域的局部变观设计,极大地节省时间,提高效率。基于压缩感知的非规则观测系统设计为后续超
高密度的面元处理提供更大的空间,优化设计障碍物区的观测系统,最小化重建信号误差,为精细储层预测和油气勘探提供准确资料,为实现“两宽一高”的勘探目的提供采集基础。
[0026]
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0027]
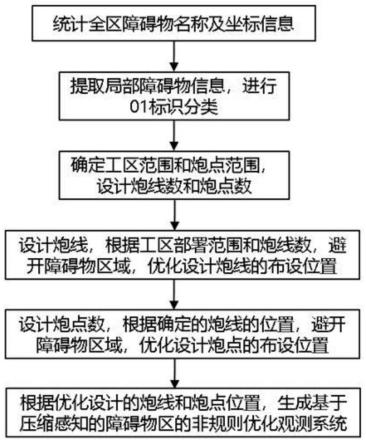
图1是基于障碍物矢量图的压缩感知随机炮点设计方法的流程图;
[0028]
图2是具体实例的优化设计非规则观测系统的示意图。
具体实施方式
[0029]
下面结合附图和具体实施例对本发明进行详细说明。
[0030]
本发明提出基于障碍物矢量图的压缩感知随机炮点设计方法,基于压缩感知理论,采用贪心序贯算法压制感知矩阵的互相关值,进行优化设计过障碍物区的随机炮点。
[0031]
假设真实信号为x,稀疏变换采用傅里叶变换f,于是有:
[0032]
x=fhs
ꢀꢀꢀ
(公式1)
[0033]
其中s为信号x在傅里叶域的稀疏表示。
[0034]
采样矩阵φ为单位矩阵i抽出的若干列组成的矩阵,则有采样数据:
[0035]
y=φx=φfhs=ψs
ꢀꢀꢀ
(公式2)
[0036]
其中ψ=φfh记为感知矩阵,其列向量为ψi,列向量间的最大互相关值为:
[0037][0038]
可以证明,感知矩阵列向量间的最大互相关值即为非规则采样归一化频谱的最大非零频率振幅,也就是因为非规则破坏稀疏即的正交性所引起的最大频谱泄露。根据压缩感知理论,μ越小,则信号在非规则采集后能够重建的概率就越高。将各列互相关系数中的最大值作为优化目标,通过迭代算法以及全局微调,通过改变非规则采样点的分布来降低最大互相关值,获得互相关最小的采样方案,即:
[0039]
φ=argminμ
ꢀꢀꢀ
(公式4)。
[0040]
结合附图所示,详细的应用实施例说明如下:
[0041]
如图1所示,图1为本发明的基于障碍物矢量图的压缩感知随机炮点设计方法,步骤如下:
[0042]
步骤1、依据工区部署边界,利用野外踏勘等资料,统计工区内所有障碍物的名称及其对应的障碍物分布位置的起止坐标信息,生成全工区的障碍物文件。
[0043]
步骤2、依据局部障碍物变观位置,从步骤1中的障碍物文件提取目标区域的障碍物信息,并对全工区障碍物的位置信息进行01分类标识,其中0代表该区域为障碍物区域,无法布设炮点;1代表该区域可以布设炮点。
[0044]
步骤3、按照工区范围和地质任务,确定炮线的布设范围,确定炮线数和炮点数;
[0045]
步骤4、按照炮线的布设范围和炮线的数目,利用贪心序贯的方法优化设计炮线的位置。假设炮线数为sr,等效为一条线上的sr个点的优化设计,包括以下步骤:
[0046]
(4.1)确定炮线的数目sr和垂直炮线方向的网格间距,将所有垂直炮线的网格点
作为候选采样点;
[0047]
(4.2)设采样矩阵为φ,定义ψ=φfh,其中,f表示傅里叶变换,上标h表示共轭转置,ψ记为感知矩阵,设感知矩阵ψ的任意两个列向量分别为ψi和ψj,列向量间的最大互相关值μ记为:
[0048][0049]
(4.3)假设炮线的采样矩阵为φsr,遍历所有候选采样点,其中当该候选采样点存在障碍物信息且标识为0时,代表该候选采样点位置不可以布设炮线;继续候选下一个采样点,直至该候选采样点位置标识为1时,可计算将每个候选采样点加入采样矩阵φsr后的μsr值,取使μsr值最小的候选点作为新增采样点,更新采样矩阵φsr;
[0050]
(4.4)重复步骤4.3的操作,直到炮线数目达到规定的数目;
[0051]
(4.5)在初步确定φsr后,以每个采样点的位置为基准做随机抖动,进行采样微调,以φsr=argminμsr为目标,寻找使得μsr最小时的采样矩阵φsr,从而确定最终的炮线位置。
[0052]
步骤5、设计炮点,根据确定的炮线的位置,优化设计炮点的布设位置。
[0053]
(5.1)确定炮点的数目pr和网格间距,将炮点布设范围内的所有网格点作为候选采样点;
[0054]
(5.2)假设炮点的采样矩阵为φpr,在炮线采样矩阵φsr的基础上,遍历所有候选采样点,其中当该候选采样点存在障碍物信息且标识为0时,代表该候选采样点位置不可以布设炮线;继续候选下一个采样点,直至该候选采样点位置标识为1时,可计算将每个候选采样点加入采样矩阵φpr后的μpr值,取使μpr值最小的候选点作为新增采样点,更新采样矩阵φpr;
[0055]
(5.3)重复步骤52的操作,直到炮点数达到规定的数目;
[0056]
(5.4)在初步确定φpr后,以每个采样点的位置为基准做随机抖动,进行采样微调,以φpr=argminμpr为目标,寻找使得μpr最小时的采样矩阵φpr,从而确定所有炮点的最终布设位置。
[0057]
步骤6根据优化设计的炮线和炮点的位置,生成基于压缩感知的过障碍物的非规则观测系统设计。
[0058]
结合具体的应用实例说明如下:
[0059]
选择某一海上试验工区,该区域存在一个大型的水域养殖区,试验工区的总范围为16km
×
1.8km,因海底obc接收的特殊性,因此接收点规则布设到整个工区范围,设计18条接收线全排列接收,接收线距125m,每条线504道接收,道间距25m。仅对炮点进行压缩感知非规则采集设计。炮点区域为5km
×
2.5km,35排炮,平均炮排距125m,炮排南北长4.375km;每排炮70个炮点,平均炮点距50m,炮点东西宽3.5km,共设计2450炮。
[0060]
针对大型的障碍物区域,开展了障碍物区的非规则观测系统设计,如图2所示,为基于压缩感知的障碍物区的非规则观测系统设计,图示不规则区域为障碍物区,红色方块代表炮点位置,蓝色代表接收点的位置,炮点距最小14米,最大73米。炮线距最小63米,最大151米。
[0061]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的普通技术人员
应该了解,上述实施例不以任何形式限制本发明的保护范围,凡采用等同替换等方式所获得的技术方案,均落于本发明的保护范围内。
[0062]
本发明未涉及部分均与现有技术相同或可采用现有技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1