面向车辆与无人机伴飞协同的虚拟原型系统
1.本发明涉及一种面向车辆与无人机伴飞协同的虚拟原型系统。
背景技术:
2.随着无人化时代的到来,如果能够将无人化地面平台与空中平台综合起来协同作业,则可将两者的优势结合发挥更大的作用。但依赖单一的无人化地面平台或者空中无人化平台都具有各自的弊端,直接构建空地协同物理系统开展关键技术研究需要耗费巨大的人力物力和时间成本,还存在巨大的风险。
3.如果构建能完全反映实际物理系统动力学行为的虚拟样机模型,在虚拟样机上研究各部分的机械结构、机巢和无人机动力学参数对协同性能的影响,或者研究各部分控制算法和协同控制算法对最终性能的影响,则可以在做物理系统之前就优化出各部分动力学参数和控制算法,大大节约空地协同的人力物力和时间成本,还可以节约风险。因此,构建面向车辆与无人机伴飞协同的虚拟原型系统对于空地协同研究具有重要意义。
技术实现要素:
4.本发明的目的是提供一种可综合车辆、机巢、无人机和三维数字地图的三维实体建模、动力学分析以及系统协同的虚拟样机模型,为进一步对机械结构物理参数、控制算法、电机驱动算法和协同控制算法提供基础的面向车辆与无人机伴飞协同的虚拟原型系统。
5.本发明的面向车辆与无人机伴飞协同的虚拟原型系统,包括:
6.a、建立simulink仿真环境;
7.b、根据车辆的结构特征,建立一个可以导入simulink仿真环境的车辆三维结构模型,并将车辆三维结构模型导入simulink仿真环境中;
8.c、在simulink仿真环境中设置车辆动力系统标定参数模型、车辆动力学参数和轮胎附着系数,构建车辆虚拟样机动力学可视化模型;
9.d、将附着在车辆上的机巢三维结构模型导入simulink仿真环境中,在simulink仿真环境中设置机巢动力学参数和驱动电机模型,构建机巢虚拟样机动力学可视化模型;
10.e、根据无人机的结构特征,建立一个可以导入simulink仿真环境的无人机三维结构模型,并将无人机三维结构模型导入simulink仿真环境中;
11.f、在simulink仿真环境中设置无人机机架动力学参数、无人机电机模型和无人机螺旋桨升力扭矩模型,构建无人机虚拟样机动力学可视化模型;
12.g、向simulink仿真环境中导入三维数字化地图模型,并将车辆、机巢和无人机虚拟样机模型嵌入三维数字化地图模型,构建具有统一空间坐标系的、能够映射环境、车辆、机巢和无人机物理系统动力学行为的可视化虚拟样机模型,虚拟样机模型设有环境参数输入接口、车辆参数输入接口、机巢参数输入接口和无人机参数输入接口。
13.优选的,所述无人机为固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机和/或扑
翼无人机。
14.优选的,所述无人机利用北斗系统和/或gps系统进行定位。
15.优选的,所述无人机采用电池供电飞行。
16.本发明的面向车辆与无人机伴飞协同的虚拟原型系统,通过构建能完全反映实际物理系统动力学行为的虚拟样机模型,在虚拟样机上研究各部分的机械结构、机巢和无人机动力学参数对协同性能的影响,或者研究各部分控制算法和协同控制算法对最终性能的影响,由此可以在做物理系统之前就优化出各部分动力学参数和控制算法,大大节约空地协同的人力物力和时间成本,还可以节约风险。因此,本发明的构建面向车辆与无人机伴飞协同的虚拟原型系统对于空地协同研究具有重要意义,其可综合车辆、机巢、无人机和三维数字地图的三维实体建模、动力学分析以及系统协同的虚拟样机模型,为进一步对机械结构物理参数、控制算法、电机驱动算法和协同控制算法提供基础。
17.下面结合附图对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
附图说明
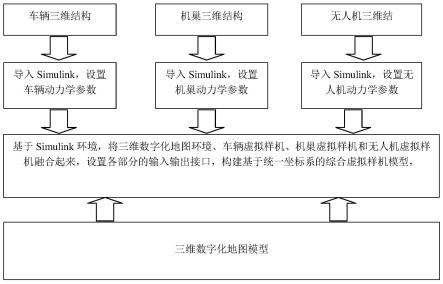
18.图1为本发明的面向车辆与无人机伴飞协同的虚拟原型系统的流程图。
具体实施方式
19.simulink是美国mathworks公司推出的matlab中的一种可视化仿真工具。simulink是一个模块图环境,用于多域仿真以及基于模型的设计。它支持系统设计、仿真、自动代码生成以及嵌入式系统的连续测试和验证。simulink提供图形编辑器、可自定义的模块库以及求解器,能够进行动态系统建模和仿真。
20.simulink与matlab相集成,能够在simulink中将matlab算法融入模型,还能将仿真结果导出至matlab做进一步分析。simulink应用领域包括汽车、航空、工业自动化、大型建模、复杂逻辑、物理逻辑,信号处理等方面。
21.参见图1,本发明的面向车辆与无人机伴飞协同的虚拟原型系统,包括:
22.a、建立simulink仿真环境;
23.b、根据车辆的结构特征,建立一个可以导入simulink仿真环境的车辆三维结构模型,并将车辆三维结构模型导入simulink仿真环境中;
24.c、在simulink仿真环境中设置车辆动力系统标定参数模型、车辆动力学参数和轮胎附着系数,构建车辆虚拟样机动力学可视化模型;
25.d、将附着在车辆上的机巢三维结构模型导入simulink仿真环境中,在simulink仿真环境中设置机巢动力学参数和驱动电机模型,构建机巢虚拟样机动力学可视化模型;
26.e、根据无人机的结构特征,建立一个可以导入simulink仿真环境的无人机三维结构模型,并将无人机三维结构模型导入simulink仿真环境中;
27.f、在simulink仿真环境中设置无人机机架动力学参数、无人机电机模型和无人机螺旋桨升力扭矩模型,构建无人机虚拟样机动力学可视化模型;
28.g、向simulink仿真环境中导入三维数字化地图模型,并将车辆、机巢和无人机虚拟样机模型嵌入三维数字化地图模型,构建具有统一空间坐标系的、能够映射环境、车辆、
机巢和无人机物理系统动力学行为的可视化虚拟样机模型,虚拟样机模型设有环境参数输入接口、车辆参数输入接口、机巢参数输入接口和无人机参数输入接口。
29.作为本发明的进一步改进,上述无人机为固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机和/或扑翼无人机。
30.作为本发明的进一步改进,上述无人机利用北斗系统和/或gps系统进行定位。
31.作为本发明的进一步改进,上述无人机采用电池供电飞行。
32.本发明的面向车辆与无人机伴飞协同的虚拟原型系统,是将车辆三维结构模型导入simulink仿真环境中,在simulink仿真环境中设置车辆动力系统标定参数模型、车辆动力学参数和轮胎附着系数等,构建车辆虚拟样机动力学可视化模型;然后将附着在车辆上的机巢三维结构模型导入simulink仿真环境中,在simulink仿真环境中设置机巢动力学参数和驱动电机模型,构建机巢虚拟样机动力学可视化模型;最后将无人机三维结构模型导入simulink仿真环境中,在simulink仿真环境中设置机架动力学参数、电机模型和螺旋桨升力扭矩模型,构建无人机虚拟样机动力学可视化模型,最后导入三维数字化地图模型,并将车辆、机巢和无人机虚拟样机模型嵌入三维数字化地图模型,构建具有统一空间坐标系的、能够映射环境、车辆、机巢和无人机物理系统动力学行为的可视化虚拟样机模型,虚拟样机模型具备环境、车辆、机巢和无人机输入接口。因此可以基于该虚拟样机模型开展协同控制算法研究,并将研究结果向实际物理系统应用。
33.本发明通过构建能完全反映实际物理系统动力学行为的虚拟样机模型,在虚拟样机上研究各部分的机械结构、机巢和无人机动力学参数对协同性能的影响,或者研究各部分控制算法和协同控制算法对最终性能的影响,由此可以在做物理系统之前就优化出各部分动力学参数和控制算法,大大节约空地协同的人力物力和时间成本,还可以节约风险。因此,本发明的构建面向车辆与无人机伴飞协同的虚拟原型系统对于空地协同研究具有重要意义,其可综合车辆、机巢、无人机和三维数字地图的三维实体建模、动力学分析以及系统协同的虚拟样机模型,为进一步对机械结构物理参数、控制算法、电机驱动算法和协同控制算法提供基础。
34.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1