一种基于无监督自适应学习的高光谱遥感影像去噪方法
1.本发明基于遥感图像技术处理领域,特别涉及一种基于无监督自适应学习的高光谱遥感影像去噪方法。
背景技术:
2.随着传感器光谱分辨率的上升,高光谱遥感得到了迅速的发展。高光谱卫星可快速获取同一地区数百个波段的影像,具有图谱合一的优点。但是,在高光谱遥感卫星获取数据的过程中,由于恶劣的大气条件、不完善的校正过程以及传感器自身的缺陷,高光谱遥感影像不可避免地会受到各种噪声的污染,产生条带噪声、随机噪声、影像对比度降低等降质问题,严重限制了影像数据的可用性。在含有混合噪声的影像数据中,影像信息由反映地面真实特征的原始辐射信息和噪声信息组成,噪声严重降低了影像质量和精度。因此,去除高光谱遥感卫星影像中的混合噪声并真实地还原影像辐射信息至关重要,去除混合噪声能够大大提升高光谱遥感卫星影像数据的可用性,有助于影像的后续处理,如资源勘查、变化检测、土地利用类型调查等。
3.目前,现有的高光谱混合噪声去除方法在实际应用中有较大的局限性。其中,基于滤波的方法受限于固定的变换域,难以充分挖掘高光谱数据的几何特征,且实际应用中很难确定合适的截止频率;基于正则化模型的方法基于对噪声特点和潜在无噪影像特征的人为假设,难以对海量高光谱数据中的复杂噪声进行精确建模,且当其添加较多约束项时,求解过程非常复杂,运算效率较低,难以满足实际应用要求;基于深度学习的方法具有高效的运算效率,但其训练过程依赖于大量的噪声-无噪影像对,由于机载、星载高光谱遥感平台通常无法获取真实影像对,深度学习模型大多在模拟影像对上进行训练,降低了模型在真实数据上的泛化性。因此,研究能提高模型泛化性、鲁棒高效地完成高光谱遥感影像混合噪声去除任务的深度学习模型,有助于提升现有卫星数据质量,为高光谱遥感卫星的高效预处理提供有益指导。
技术实现要素:
4.本发明的目的在于提出一种基于无监督自适应学习的高光谱遥感影像去噪方法。
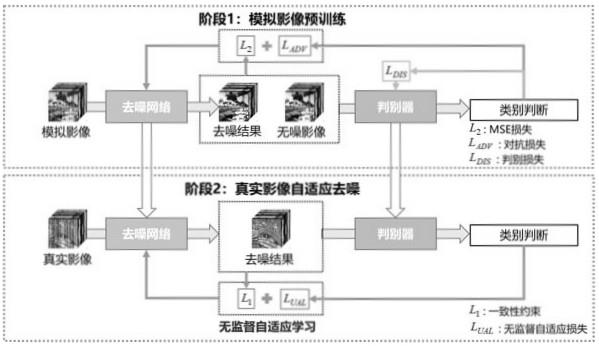
5.本发明所提供的这种基于无监督自适应学习的高光谱遥感影像去噪方法,针对模拟数据和真实数据之间的降质差异降低模型泛化性的问题,提出无监督自适应学习策略,在高质量地面影像上进行预训练,设计判别器对噪声进行建模,在处理真实数据时由判别器对去噪参数进行微调,提升模型泛化性。本发明在模型中设计了基于空-谱残差的深度去噪网络和基于全局信息建模的判别器以充分挖掘高光谱深度先验。
6.在本发明中我们所提出的基于无监督自适应学习的高光谱遥感影像去噪方法具有以下三个显著特点。一是基于无监督自适应学习的训练策略,使得模型能够学习模拟影像的一般图像先验,并能根据真实影像对去噪参数进行微调,从而提升模型的泛化性;其二,创新性地引入判别器对噪声模式进行学习,实现真实影像上的无监督学习,并通过全局
池化有效提升模型的全局空-谱建模能力;其三,针对高光谱去噪任务的特点,设计了空-谱残差卷积块充分挖掘模型中的底层特征,使得去噪结果中的空间细节信息恢复更加准确。
7.本发明提供基于无监督自适应学习的高光谱遥感影像去噪方法,实现步骤如下:步骤1,输入地面高光谱影像,对影像数据进行归一化,使得像素值分布在0~1的范围内,再将其处理成一定大小的影像块,然后对其添加模拟噪声生成降质影像,其中,h,w,b分别为影像行,列和波段数;步骤2,对去噪网络初始参数和判别器初始参数进行初始化;步骤3,基于适应性矩估计的算法训练去噪网络和判别器,设当前迭代次数为k;步骤3.1,将模拟降质影像输入到去噪网络中,去噪网络通过计算输出去噪结果,其中,为第k次迭代时去噪网络的映射函数,为第k次迭代时去噪网络的参数;步骤3.2,分别将无噪影像和去噪结果输入到判别器中,判别器计算当前输入为无噪影像的概率,无噪影像对应的概率值为,去噪结果对应的概率值为,其中,为第k次迭代时判别器的映射函数,为第k次迭代时判别器的参数;步骤3.3,计算去噪网络的损失,包括mse损失和对抗损失;步骤3.4,计算判别器的判别损失;
ꢀꢀꢀꢀꢀ
(3)其中n为设定的batch size,表示l2范数;步骤3.5,根据mse损失和对抗损失计算梯度,反向传播更新去噪网络参数,输出第k + 1次迭代时去噪网络的参数,根据判别损失计算梯度,反向传播更新判别器参数,输出第k + 1次迭代时判别器的参数;步骤3.6,判断当前迭代次数是否超过一定次数,若不是,则进行步骤3.1,若是,则进行步骤4;步骤4,输入真实高光谱影像,对影像数据进行归一化,使得像素值分布在0~1的范围内,其中,,,分别为真实影像行,列和波段数;步骤5,基于适应性矩估计的算法对训练好的去噪网络进行微调,其中,为步骤3输出的去噪网络参数,设当前迭代次数为;
步骤6,将真实降质影像输入到微调后去噪网络中,去噪网络通过计算输出最终的去噪结果,其中,为步骤5输出的去噪网络参数。
8.进一步的,步骤1中的模拟噪声包括高斯噪声、条带噪声和脉冲噪声,为高斯噪声的标准差。
9.进一步的,步骤2中采用基于he初始化的方式对去噪网络初始参数和判别器初始参数进行初始化。
10.进一步的,步骤2中所述去噪网络第1层由卷积层conv和parametricrelu激活函数构成,第2-13层为空-谱残差卷积块d-block,第14层由卷积层conv和批量归一化层bn构成,输出空-谱残差卷积模块的特征图,第15-16层由卷积层conv、批量归一化层bn和parametricrelu激活函数构成,最后通过卷积输出去噪结果,且在空-谱残差卷积块和去噪网络的输入和输出使用跳层连接;判别器的第1层由卷积层conv和leaky relu激活函数组成,第2-8层为leakyconv,由卷积层conv、批量归一化层bn和leaky relu激活函数组成,偶数层leakyconv的步长设定为2,第9层通过卷积层conv和sigmoid激活函数输出概率矩阵;空-谱残差卷积块由两层多通道二维卷积构成,其后为批量归一化层bn,第一层bn后为parametricrelu激活函数,同时使用跳层连接将d-block输出的特征图和输入相加。
11.进一步的,mse损失和对抗损失的具体计算公式如下;的具体计算公式如下;其中,n为设定的batch size。
12.进一步的,步骤5的具体实现方式如下;步骤5.1,将真实降质影像输入到去噪网络中,去噪网络通过计算输出去噪结果,其中,为第次迭代时去噪网络的参数;步骤5.2,将无噪影像去噪结果输入到判别器中,判别器计算当前去噪结果为无噪影像的概率,其中,为步骤3输出的判别器参数;步骤5.3,计算去噪网络的损失,包括一致性约束损失和无监督自适应损失;步骤5.4,根据一致性约束损失和无监督自适应损失计算梯度,反向传播更新去噪网络参数,输出第次迭代时去噪网络的参数;步骤5.5,判断当前迭代次数是否超过一定次数,若不是,则进行步骤5.1,若是,则进行步骤6。
13.进一步的,一致性约束损失和无监督自适应损失的具体计算公式如下;的具体计算公式如下; 。
14.本发明方法具有以下显著效果:(1)学习模拟影像一般图像先验后,可进一步学习真实图像先验,提升模型泛化性;(2)设计了判别器对图像中的噪声模式进行学习,实现真实降质影像上的无监督学习,使用全局池化进一步提升模型全局信息建模能力;(3)设计空-谱残差卷积块保证网络对底层特征的利用,准确恢复空间细节信息。
附图说明
15.图1是本发明实施例的整体流程图。
16.图2是本发明实施例步骤2中去噪网络、判别器和空-谱残差卷积块的结构图。
17.图3是本发明实施例步骤6中所输出的最终高光谱影像去噪结果。
具体实施方式
18.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
19.如图1所示,本发明提供的一种基于无监督自适应学习的高光谱遥感影像去噪方法,包括以下步骤:步骤1,输入100张来自icvl数据集的地面高光谱影像,对影像数据进行归一化,使得像素值分布在0~1的范围内,再将其处理成40
×
40
×
10的影像块,然后对其添加模拟噪声生成降质影像,模拟噪声包括高斯噪声、条带噪声和脉冲噪声,其中,h,w,b分别为影像行,列和波段数,为高斯噪声的标准差;考虑到真实高光谱影像各波段噪声强度的差异,对各波段的模拟噪声强度进行随机选择,其中,高斯噪声标准差、条带噪声标准差、脉冲噪声百分比。
20.步骤2,基于he初始化的方式对去噪网络初始参数和判别器初始参数进行初始化,去噪网络、判别器以及去噪网络中的空-谱残差卷积块(d-block)如图2所示;空-谱残差卷积块由两层多通道二维卷积(convolutional layer, conv)构成,其后为批量归一化层(batch normalization, bn),第一层bn后为parametricrelu (prelu)激活函数,同时使用跳层连接将d-block输出的特征图和输入相加;去噪网络第1层由conv和prelu激活函数构成,第2-13层为d-block,第14层由conv和bn构成,输出空-谱残差卷积模块的特征图,第15-16层由conv、bn和prelu激活函数构成,最后通过卷积输出去噪结果,且在空-谱残差卷积块和去噪网络的输入和输出使用跳层连接;判别器的第1层由conv和leaky relu激活函数组成,第2-8层为leakyconv,由conv、bn和leaky relu激活函数组成,偶数层leakyconv的步长设定为2,第9层通过conv和sigmoid激活函数输出概率矩阵。
21.步骤3,基于适应性矩估计的算法训练去噪网络和判别器,设定batch size为128,
设当前迭代次数为k;步骤3.1,将模拟降质影像输入到去噪网络中,去噪网络通过计算输出去噪结果,其中,为第k次迭代时去噪网络的映射函数,为第k次迭代时去噪网络的参数;步骤3.2,分别将无噪影像和去噪结果输入到判别器中,判别器计算当前输入为无噪影像的概率,无噪影像对应的概率值为,去噪结果对应的概率值为,其中,为第k次迭代时判别器的映射函数,为第k次迭代时判别器的参数;步骤3.3,计算去噪网络的损失,包括mse损失和对抗损失,其中,n为设定的batch size;size;步骤3.4,计算判别器的判别损失;
ꢀꢀꢀꢀꢀ
(3)步骤3.5,根据mse损失和对抗损失计算梯度,反向传播更新去噪网络参数,输出第k + 1次迭代时去噪网络的参数,根据判别损失计算梯度,反向传播更新判别器参数,输出第k + 1次迭代时判别器的参数;步骤3.6,判断当前迭代次数是否超过500次,若不是,则进行步骤3.1,若是,则进行步骤4。
22.步骤4,输入whu-hi-baoxie无人机高光谱影像,对影像数据进行归一化,使得像素值分布在0~1的范围内,其中,,,分别为真实影像行,列和波段数。
23.步骤5,基于适应性矩估计的算法对训练好的去噪网络进行微调,其中,为步骤3输出的去噪网络参数,设当前迭代次数为;步骤5.1,将真实降质影像输入到去噪网络中,去噪网络通过计算输出去噪结果,其中,为第次迭代时去噪网络的参数;步骤5.2,将无噪影像去噪结果输入到判别器中,判别器计算当前去噪结果为
无噪影像的概率,其中,为步骤3输出的判别器参数;步骤5.3,计算去噪网络的损失,包括一致性约束损失和无监督自适应损失;;步骤5.4,根据一致性约束损失和无监督自适应损失计算梯度,反向传播更新去噪网络参数,输出第次迭代时去噪网络的参数;步骤5.5,判断当前迭代次数是否超过10次,若不是,则进行步骤5.1,若是,则进行步骤6。
24.步骤6,将真实降质影像输入到微调后去噪网络中,去噪网络通过计算输出whu-hi-baoxie无人机高光谱影像最终的去噪结果,如图3所示,其中,为步骤5输出的去噪网络参数。
25.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1