基于动作捕捉点云的关节旋转中心优化方法及设备与流程
1.本发明具体设计一种关节旋转中心优化方法,属于动作捕捉和人体肌骨建模技术领域。
背景技术:
2.运动捕捉与肌骨建模是最常见的用于人体运动特征评测的技术。目前广泛用于体育表现的评估,骨科疾病的功能评估,电影动画的制作等领域。评测的实施主要通过在人体骨性标志位粘贴光学反光球,通过运动捕捉系统捕捉反光球的三维空间坐标,从而根据反光球的空间坐标计算关节运动角度等参数。关节角度的计算方式主要有两种方式,一种是基于标记点的连线,计算线段之间的夹角;另一种是用光学标记点驱动带有预设关节约束的运动模型(如anybody或opensim 的结构模型),从而计算关节角度。第一种方式,简单方便,但是完全基于标记点的计算方法对标记点粘贴位置的误差非常敏感,容易造成关节角度计算的较大偏差。第二种方式,相对复杂,计算过程与人体的真实运动更加接近,但是建模过程中需要预设各个关节中心点(通过调整体节长度和关节旋转角度实现)。传统的关节中心点预设方法通常采用静态站立时贴在关节内外侧光学标记点的中点作为预设的关节中心点。因此,贴点的误差将直接影响预设的关节中心点,从而影响关节角度的计算准确性。因此,如何降低贴点误差造成的影响,是提高运动评估有效性的关键。
技术实现要素:
3.本发明是为了解决基于标记点计算的关节运动参数对贴点误差敏感存在较大误差的问题,进而提出了一种基于动作捕捉点云的关节旋转中心优化方法、存储介质及设备。
4.基于动作捕捉点云的关节旋转中心优化方法,包括以下步骤:基于采集的优化关节和与优化关节分别连接的第一骨、第二骨在相对静止状态及相对运动状态下标记点数据,将第一骨相对运动状态下标记点数据重合到相对静止状态下标记点数据上,并基于对应的旋转平移关系将标记点数据运动轨迹转化成第一骨保持不动、第二骨通过优化关节围绕第一骨的旋转运动;将当前帧的第二骨标记点重合到上一帧的第二骨对应的标记点上,确定旋转平移矩阵并获取旋转中心p点坐标;计算完整步态周期中所有相邻两帧旋转平移矩阵的旋转中心p,将作为最优目标,并将其转变成最优化问题,进而实现关节旋转中心的优化;其中,i为单位矩阵,n为完整步态周期中的帧数。
5.进一步地,将作为最优目标,并将其转变成的最优化问题如下:
其中,p_x、p_y、p_z为旋转中心p点坐标值,p_marker为优化关节对应标记点的中心位置点,p_marker_x、p_marker_y、 p_marker_z为p_marker的坐标;offset 优化范围,offset_x、offset_y、offset_z分别为优化范围的坐标。
6.进一步地,所述获取旋转中心p点坐标的过程是通过数值计算的方式实现的。
7.进一步地,将第一骨相对运动状态下标记点数据重合到相对静止状态下标记点数据上的过程是利用标记点集重合算法实现的。
8.进一步地,将当前帧的第二骨标记点重合到上一帧的第二骨对应的标记点上的过程是利用标记点集重合算法实现的。
9.优选地,所述标记点集重合算法迭代最近点算法。
10.优选地,所述的标记点为优化关节、与优化关节连接的第一骨、与优化关节分别连接的第二骨对应的人体部位上设置的光学标记点被运动捕捉系统捕捉后所得到的标记点。
11.优选地,优化关节在相对静止状态下的标记点至少为两个;与优化关节连接的第一骨、与优化关节分别连接的第二骨在相对静止状态下的标记点分别至少为三个。
12.一种存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于动作捕捉点云的关节旋转中心优化方法。
13.基于动作捕捉点云的关节旋转中心优化设备,所述设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于动作捕捉点云的关节旋转中心优化方法。
14.有益效果:本发明是针对基于标记点计算的关节运动参数对贴点误差敏感的问题,提出了一种关节旋转中心的优化方法。该方法融合了静态与动态两种信息,以静态信息为基准,通过优化动态过程中的关节旋转中心,从而消除了膝关节中心的计算对膝关节内外侧标记点的依赖,进而减少贴点误差对关节运动参数计算的影响。从图2的结果可以看出,采用优化后的旋转中心作为关节中心计算的膝关节的屈曲,侧屈以及旋转角度相对于传统方法均发生改变,说明采用不同的关节中心会对计算结果产生明显的影响。根据膝关节的解剖结构可知,膝关节在运动过程中并非围绕单一中心旋转,而是不断变化的。因此,传统的基于骨性标志点计算的关节中心,模型点(骨骼上的点)和驱动点(动作捕捉采集的点)之间的误差会随着关节弯曲角度不同大幅度变化。从图3的效果可以发现,优化后的旋转中心作为关节中心驱动肌骨模型,模型点与驱动点之间的偏差在动态过程中更均匀,总体的误差更小。因此,采用本发明的优化旋转中心作为模型的预设关节中心点计算的关节运动参数会更接近真实数据。
附图说明
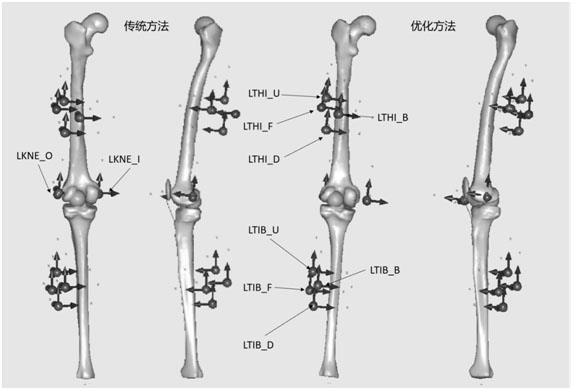
15.图1为传统基于膝关节贴点计算的关节中心点和本发明优化方法计算的中心点对比示意图;图2为两种不同膝关节旋转中心计算方法的膝关节运动角度示意图;
图3为在一个步态周期内两种不同方法下的四个模型点与驱动点之间的误差曲线;图4为在一个步态周期内两种不同方法下的每个模型点与驱动点之间的误差对比图。
具体实施方式
16.具体实施方式一:本实施方式为基于动作捕捉点云的关节旋转中心优化方法,本发明同时结合了静态站立和动态步行两种状态的数据,优化关节旋转中心,将与优化关节连接的两骨分别记为第一骨和第二骨,以膝关节为例进行说明,第一骨和第二骨分别为大腿腿骨和小腿腿骨。
17.需要说明的是本发明不仅限于膝关节,也适用其它关节,如髋关节、肩关节、肘关节等。如果是肘关节,则第一骨和第二骨分别为上臂臂骨和下臂臂骨。
18.以膝关节为例的基于动作捕捉点云的关节旋转中心优化方法,包括以下步骤:s1、将第一骨和第二骨对应的人体部位粘贴至少两个以上的光学标记点。
19.本实施方式中针对膝关节,第一骨和第二骨对应的人体部位分别为大腿和小腿,分别在大腿和小腿上粘贴4个光学标记点,其中大腿上的标记点分为lthi_u、 lthi_d、 lthi_f、 lthi_b,小腿上的标记点分为ltib_u、 ltib_d、 ltib_f、 ltib_b。膝关节内外侧分别粘贴2个标记点,分别为lkne_i和lkne_o,如图1所示。
20.需要说明的是,本发明包括但不限于通过粘贴光学标记点的形式获取第一骨和第二骨的相对静止及相对运动状态下的数据。同时,本实施方式分别在大腿和小腿上粘贴4个光学标记点,实际上也可以是3个光学标记点,或者4个以上的光学标记点。
21.s2、通过运动捕捉系统分别捕捉上述10个光学标记点在静态站立和动态步行过程中标记点标记点的空间坐标。将动态过程的大腿上的lthi_u、 lthi_d、 lthi_f、 lthi_b四个点重合到静态大腿上的lthi_u、 lthi_d、 lthi_f、 lthi_b四个点,通过标记点集重合算法构建旋转平移矩阵t1,从而将步行过程的10个点的运动轨迹转化成大腿保持不动,小腿的ltib_u、 ltib_d、 ltib_f、 ltib_b四个点通过膝关节围绕大腿旋转。本实施方式中的标记点集重合算法为icp算法(iterative closest point迭代最近点算法),但是本发明所述的标记点集重合算法可以不限于icp算法。
22.s3、通过icp等算法,构建旋转平移矩阵t
current_frame
将当前帧的小腿ltib_u、 ltib_d、 ltib_f、 ltib_b四个点重合到上一帧的小腿ltib_u、 ltib_d、 ltib_f、 ltib_b四个点。理论上相邻两帧图像的旋转中心p应符合 t
current_frame*
p=p,即通过该旋转变换前后保持不变的点。但是,实际应用中,当相邻两帧变化幅度较小,t
current_frame
的计算误差变大,计算的p点也会偏差极大。因此,本发明采用另外一种方式进行优化,也即通过数值计算的方式获取旋转中心p点坐标:将t
current_frame*
p=p变换成(t
current_frame
ꢀ‑ꢀ
i)
*
p =0,其中i为单位矩阵;理论上旋转中心p应该满足(t
current_frame
ꢀ‑ꢀ
i)
*
p =0,考虑到实际产生误差,本发明计算完整步态周期中所有相邻两帧旋转平移矩阵的旋转中心p,将作为最优目标;其中p点为需要优化的同一个关节旋转中心点,其坐标记录为[p_x,p_y,p_z,1] 。因
此,p的计算方法转化目标优化问题,可通过matlab或python的数值优化函数(如fmincon或minimize)计算。考虑到实际的几何意义,计算的旋转中心点不能偏离膝关节标记点太远,进一步将p的求解方法,转变成带有约束条件的最优化问题,即:进一步将p的求解方法,转变成带有约束条件的最优化问题,即:其中,p_marker为lkne_i和lkne_o的中点,offset 为指定的优化范围,offset_x、offset_y、offset_z分别为优化范围的坐标。
[0023]
本实施例按照图1所示的标记点粘贴方法,以膝关节为例,其中膝关节分别在骨骼内外侧髁粘贴2个标记点,分别在大腿中部和小腿中部各粘贴4个标记点。通过motionanalysis动作捕捉系统,分别捕捉站立标定姿态和行走过程中的上述10个点的空间坐标轨迹。通过本发明专利的旋转中心优化方法,计算膝关节的旋转中心坐标。将优化的旋转中心坐标设置成肌骨模型膝关节的旋转中心,分别用大腿的4个标记点和小腿的4个标记点驱动大腿和小腿运动,从而计算出膝关节在步行过程中的运动角度,如图3、图4所示。
[0024]
具体实施方式二:本实施方式为一种存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于动作捕捉点云的关节旋转中心优化方法。
[0025]
应当理解,包括本发明描述的任何方法对应的可以被提供为计算机程序产品、软件或计算机化方法,其可以包括其上存储有指令的非暂时性机器可读介质,所述指令可以用于编程计算机系统,或其他电子装置,以执行的过程。存储介质可以包括但不限于磁存储介质,光存储介质;磁光存储介质包括:只读存储器rom、随机存取存储器ram、可擦除可编程存储器(例如,eprom和eeprom)以及闪存层;或者适合于存储电子指令的其他类型的介质。
[0026]
具体实施方式三:本实施方式为基于动作捕捉点云的关节旋转中心优化设备,所述设备包括处理器和存储器,应当理解,包括本发明描述的任何包括处理器和存储器的设备,设备还可以包括其他通过信号或指令进行显示、交互、处理、控制等以及其他功能的单元、模块;所述存储器中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现所述的基于动作捕捉点云的关节旋转中心优化方法。
[0027]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1